Hello everyone.
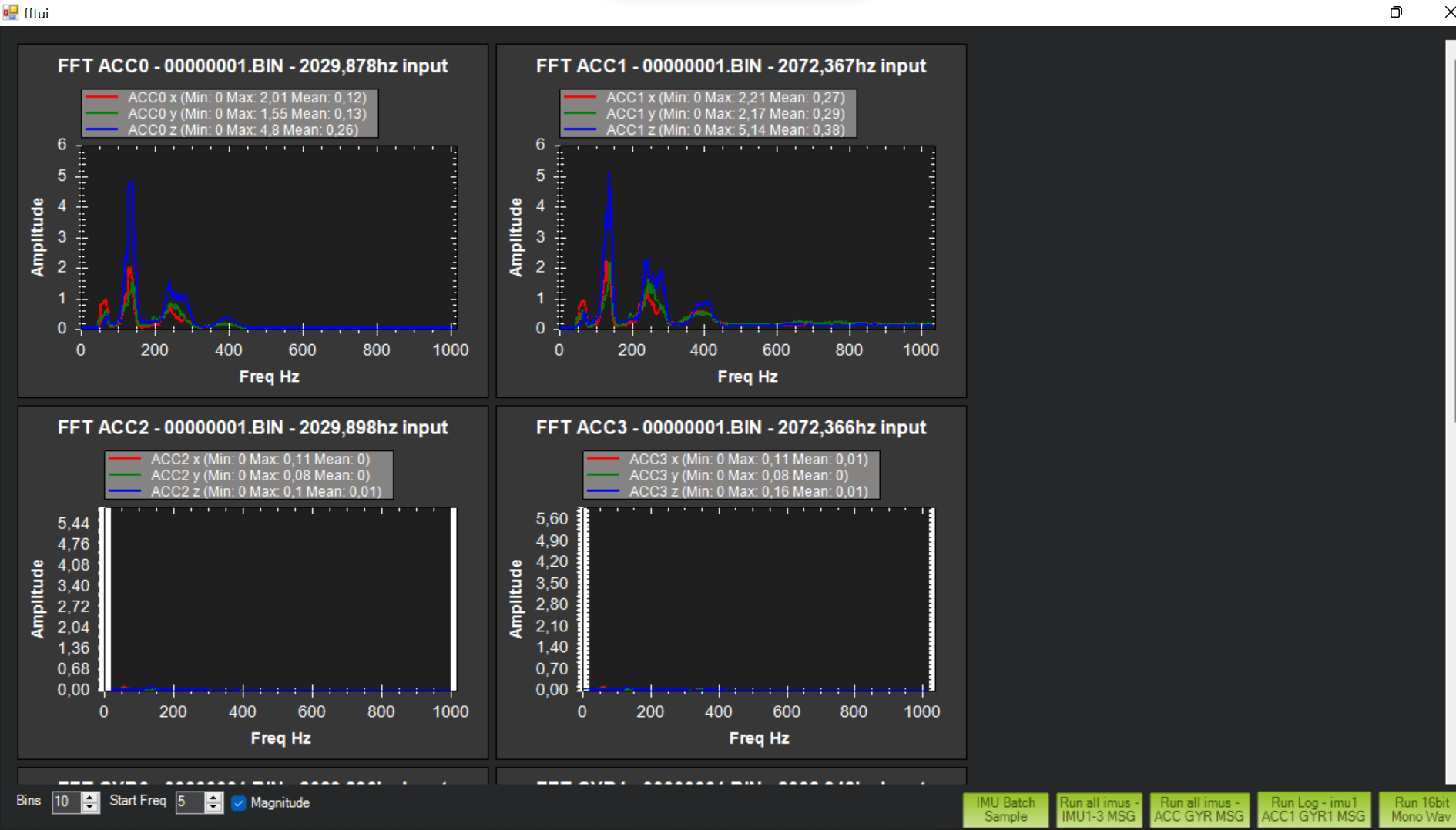
Yesterday I did the first flight with the 680mm drone with the Holybro 6c autopilot. The machine seems to fly well and I am trying to set up the FFT in flight notch filter.
Can any of you judge the result ??
Hello everyone.
Yesterday I did the first flight with the 680mm drone with the Holybro 6c autopilot. The machine seems to fly well and I am trying to set up the FFT in flight notch filter.
Can any of you judge the result ??
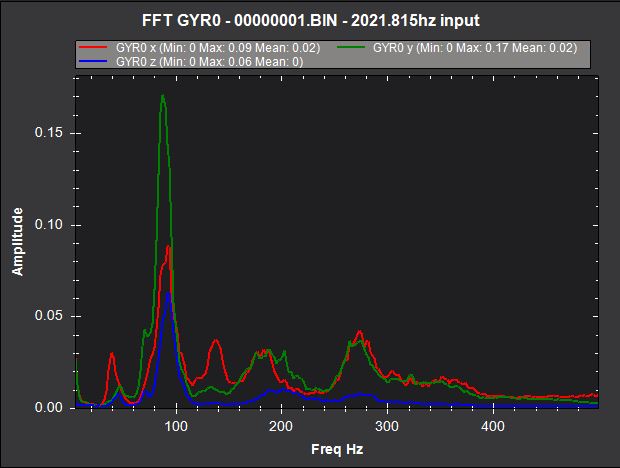
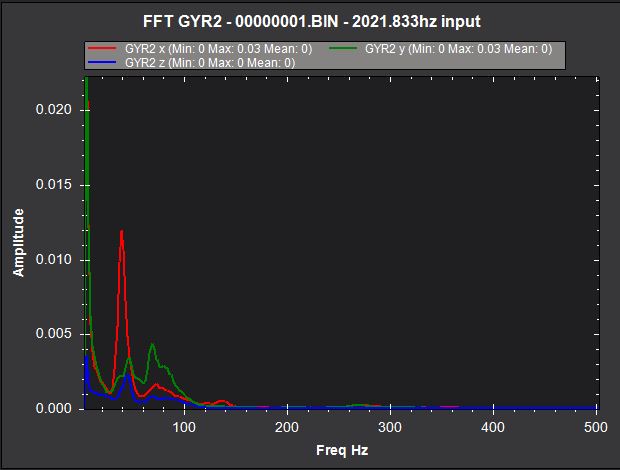
The FFT based notch is missing the 40Hz mode. First because you have FFT_MINHZ at 80Hz and 2nd it may not pick it up anyway even if you set it to 38 say. But you can try that. If it still doesn’t grab it you can try a narrow 2nd static notch at 40Hz.
I would set these also:
INS_ACCEL_FILTER,10
PSC_ACCZ_I,.36
PSC_ACCZ_P,0.18
Thanks Dave
Den mån 13 mars 2023 16:02Dave via ArduPilot Discourse <noreply@ardupilot.org> skrev: