Hi ., friends
My first take off problem , helicopter’s body always spin , can some one help me for analysis log file from this below link please.
Advanced thanks , please
Zicroff
Hi ., friends
My first take off problem , helicopter’s body always spin , can some one help me for analysis log file from this below link please.
Advanced thanks , please
Zicroff
Why are you using ArduCopter 4.0.x ?
OK , I make wrong category arducopter 4.0 , thanks you for you make it corrected to 4.1.
I think I’ll leave this to @bnsgeyer to answer fully but I suspect that the trim on the tail servo that is the issue.
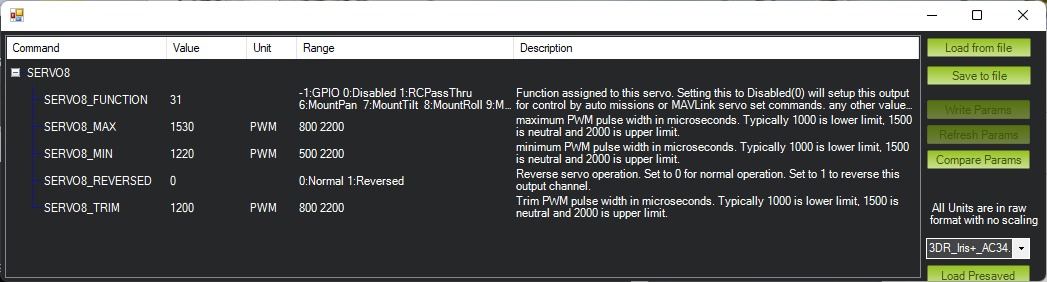
Here’s a screenshot of the SERVO8_MIN/MAX/TRIM and it seems like the trim is the same as the MIN which doesn’t seem right.
Thanks @rmackay9 , SERV08 I setting to throttle HeliRSC , and I follow Chris Olson 's setting VDO he said Trim = min please.
@rmackay9 thanks for calling my attention to this. I don’t actively follow the 4.1 thread. Servo8 is assigned to HeliRSC. It doesn’t use trim for anything, at least not that I remember. Plus that should not have anything to do with the yaw problem.
@Zicroff_Inventor I looked at your parameters from the log. First why do you have the arming_check parameter set to 0. That should be set to 1 to ensure that all systems are ready for flight.
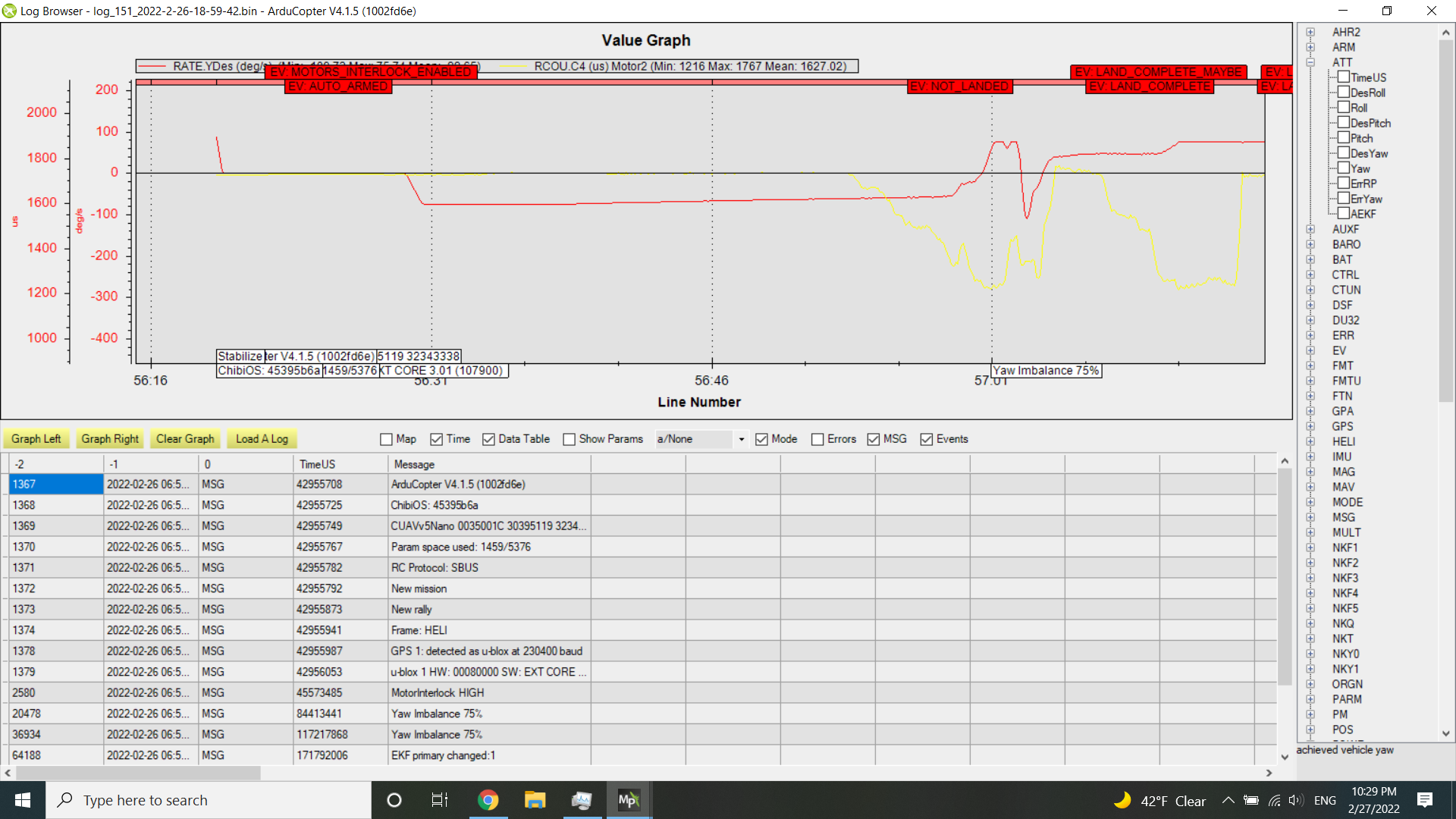
The second problem I see is that your yaw stick position is commanding right yaw rate (> 1500 PWM) however the autopilot thinks you are commanding left yaw rate (negative values). I think you have the yaw channel in your transmitter reversed. That is the only reason I can think of that would cause this.
Please check your settings and let me know what you find. Also please set the ARMING_CHECK parameter to 1.
@Zicroff_Inventor disregard my last post. I was looking at the wrong signal. My plot shows the RC output and not the RC input. Don’t do anything to your setup. I will look at this again when I have a minute. Probably tonight.
Sorry for the confusion. In the meantime, check to ensure the pilot inputs provide the correct input to the tail rotor blade pitch for the desired direction of turn. Also check to ensure the autopilot input to stabilize the yaw axis is correct. You can use this wiki page as a guide to check this.
@bnsgeyer , Thanks you very much sir
Thanks you very much for your kind quick respond please ., Yes ., I also checked list this page , my helicopter working find follow this check list please
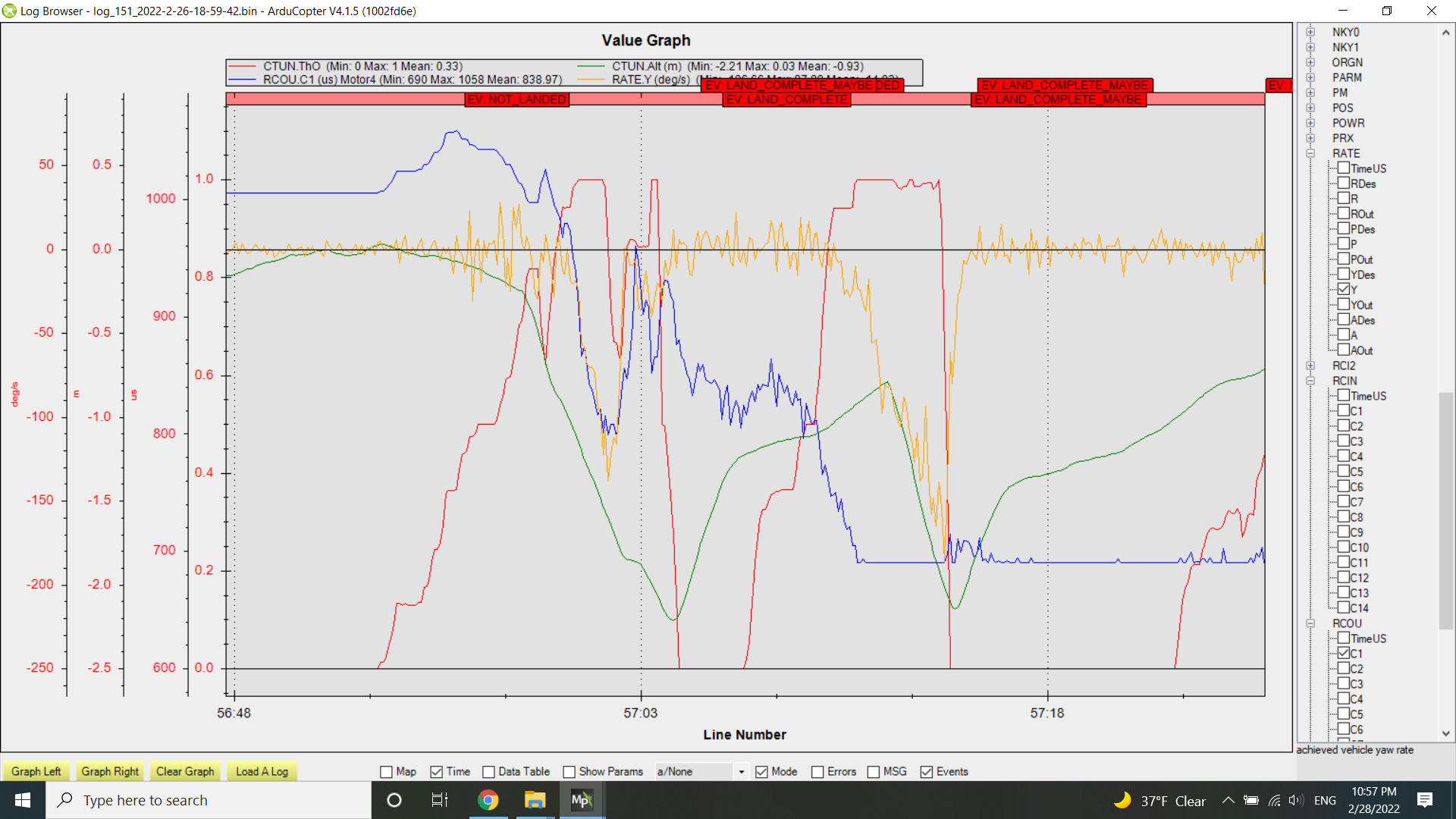
@Zicroff_Inventor It appears that your tailrotor doesn’t have enough thrust to hold keep the aircraft from yawing. Here is a plot of your collective output and a few other signals from your log.
Yeah ., I think so , now I plan to change tail’s blade from plastic to carbon fiber , in same size , I don’t know it can make balance please
@Zicroff_Inventor what kind of heli is this? Is it a kit that you built or are you trying something experimental? Please give me some details on this helicopter.
Size
Weight
Rotor diameter
Engine type and size
How is tail rotor powered (shaft/belt)
What is the rotor speed?
Collective pitch min and max that is programmed for the respective H_COL_MIN and H_COL_MAX
Hi., bill
Size : 700
Weight : ~10 kg
Rotor diameter : 1,580 mm
Engine type and size : Gas conversion from T-Rex 700 , Zenoah G270 26 cc
How is tail rotor powered (shaft/belt) : shaft
What is the rotor speed? : Try to detect with hall sensor to AUX3 CUAV V5 Nana
Collective pitch min and max that is programmed for the respective H_COL_MIN and H_COL_MAX : min 1,100 , max 1,500
Please
Thanks you.,
I wanted to know the collective pitch in degrees for those settings.
The best way to find the correct speed is to raise the your throttle curve until you can hover at about 5 deg collective pitch. If your max collective is at 10 deg(i’m guessing), then you probably need to raise your throttle curve quite a bit. I would raise it at least 10% for all of the throttle curve points.
pitch in degrees -3 till +19 please
+19 is too high. The rotor will stall. The max collective should be set no higher than 12 for UAV helicopters.
OK , now I make it down to about 12.x please.