Encountered some challenges during the initial setup and flight of a drone based on CubeOrange+.
The question arose regarding the selection of the optimal firmware. I am using an RPM controller from the Speedybee F4V3 stack, specifically the BLS 50A.
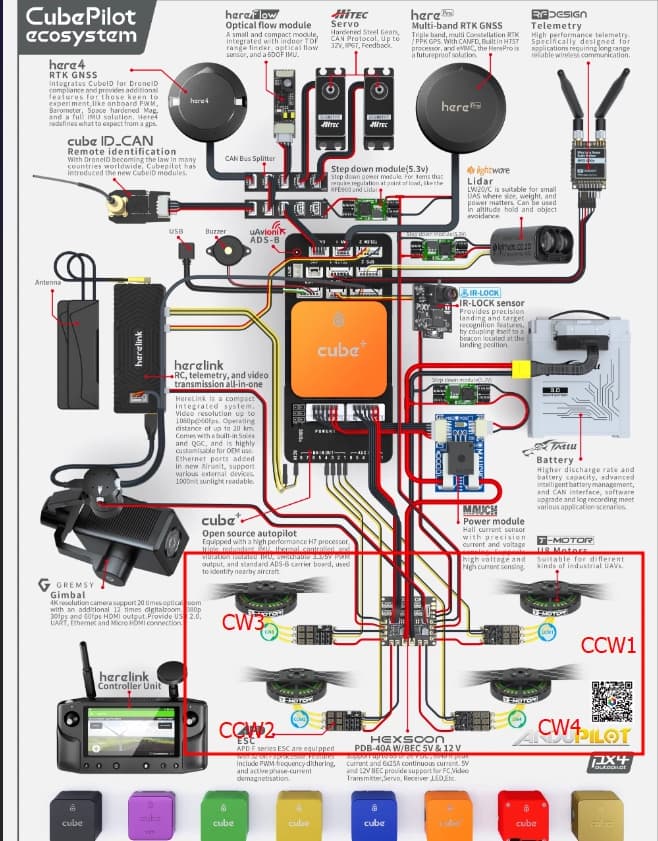
A critical situation arose during the first flight attempt. Placing the flight controller in the center of the drone’s mass, I affixed the battery underneath for an even distribution of weight. I calibrated Cube’s accel separately from the drone on a leveled table, as well as the compass and remote control. The motors are working correctly, following the order and direction as indicated in the Cube+ guide. However, during a test flight, the drone behaves unpredictably. I reviewed all settings, including PID tuning, but discarded this approach as it is typically employed for achieving smoother drone movement. In my case, the drone only lifts off the surface and immediately flips.
I attempted to record logs to track events, but this was unsuccessful. Therefore, I can only share flight videos and the firmware version I used. Please provide any assistance or advice on these issues.
Use Mission Planners Motor Test function to test the motor order and direction. Understand clearly which motors are supposed to run when you select the A-D buttons. Click the link on the Motor Test page.
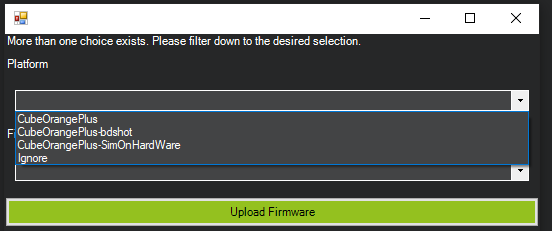
Flashed the CUBEORANGEPLUS-bdshot firmware and reordered the engines and it started to fly, but now it leans forward. I will understand further.
The question regarding point 3 remains open
Hi!
Yep, but I don`t know to read log data from FC. Maybe I need to get the card out of the FC and look at it separately. But there are only .bin format files
Please provide guidance on selecting Electronic Speed Controllers (ESCs) suitable for the CubeOrange+ flight controller. I have come across information suggesting that individual ESCs should be assigned for each motor rather than utilizing a single 4in1 ESC. It is mentioned that powering the motors from a 4in1 ESC may increase interference, potentially affecting motor performance. Currently, I am using an ESC from the SpeedyBee F4V3 stack - the BLS 50A Link. Could you kindly recommend alternative ESCs that are well-suited for a drone equipped with a CubeOrange+ flight controller?
It’s common to simply disable the onboard compass and use an external one (best practice). In that case, you have some freedom to mount the compass away from the ESC without changing other hardware. Many compatible GPS modules include a compass for that purpose.
I don’t have specific experience with the SpeedyBee ESC that you linked, but it runs BlHeli_S, so it should be perfectly compatible with nearly any autopilot.
Any ESC running BlHeli firmware should also work if you want to explore using separate ESCs.