I’m using Holybro Kakute F7 AIO and Arducopter 4.0.3 Quad.
When i fly first time in AltHold mode, with my throttle trigger, the copter climb approximately 5-6 meters although released the throttle stick.
But for second fly, without restart FC, there is no huge climbing. When i release the throttle stick, the copter keeps current altitude. If the FC restarted, the huge climb is happening again in first flight. Is there any bug?
I am investigating this issue and suspect it may caused by sd card logging. Would you mind do a simple test? Start FC, arm and then disarm (do not take off), wait a few seconds and then arm again and take off. There should be ok this time. Thank you very much
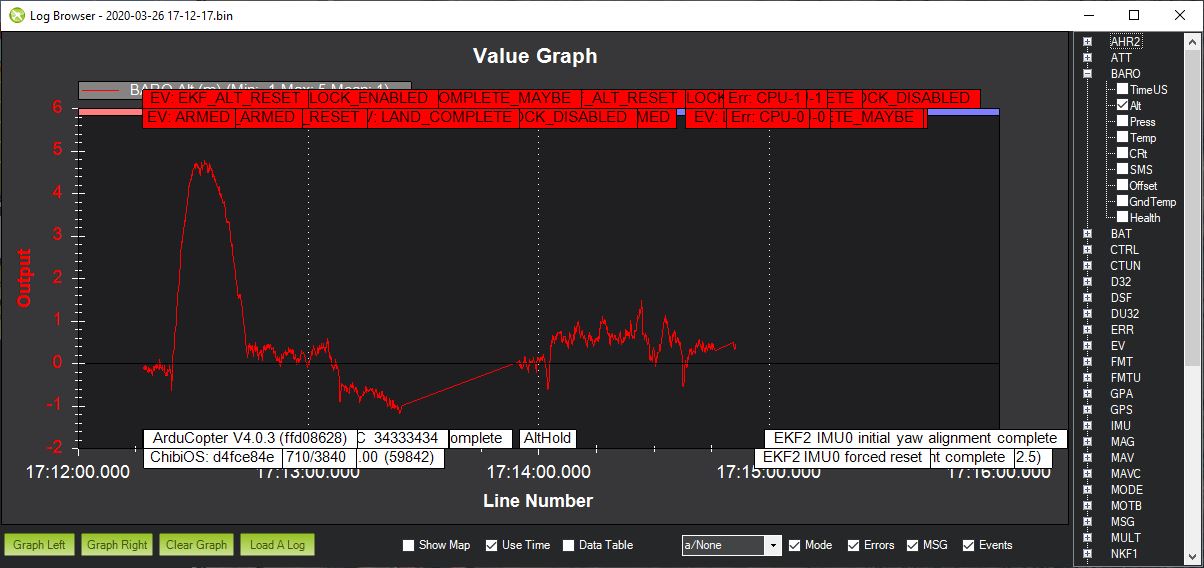
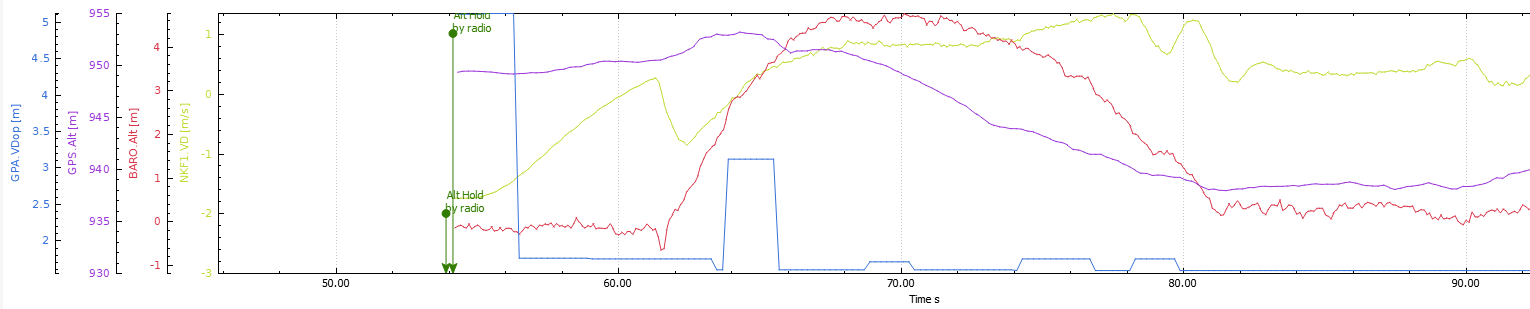
Theorizing, based on log. Your GPS is still settling when you arming first time. The GPS altitude is 950m at first, and 930m at the second start. And it is decreasing as GPS finds more sats and gain more precision (Note, that you see only 5-7 GPS during your flight which means a crappy old GPS.)
This change of altitude creeps into EKF and generate a false negative climb, which FC tries to compensate. (hence the initial jump). After you are in the air and baro takes over, climb calculation stabilized. At the second takeoff your GPS already stabilized so no jump.
Set a Fence with radius and altitude and enable it, then you cant arm until there’s a valid 3D fix.
You have to disable the fence if your going to disable GPS checks and fly without a GPS fof some reason.
Today, i tested it with 3d fix AltHold and PosHold seperately. But the problem continues. In first flight, there is huge climb but second fly there is no problem.
I’m experiencing exactly the same recently with Copter 4.0.5
Restarting FC and restarting logging several times does not fix it.
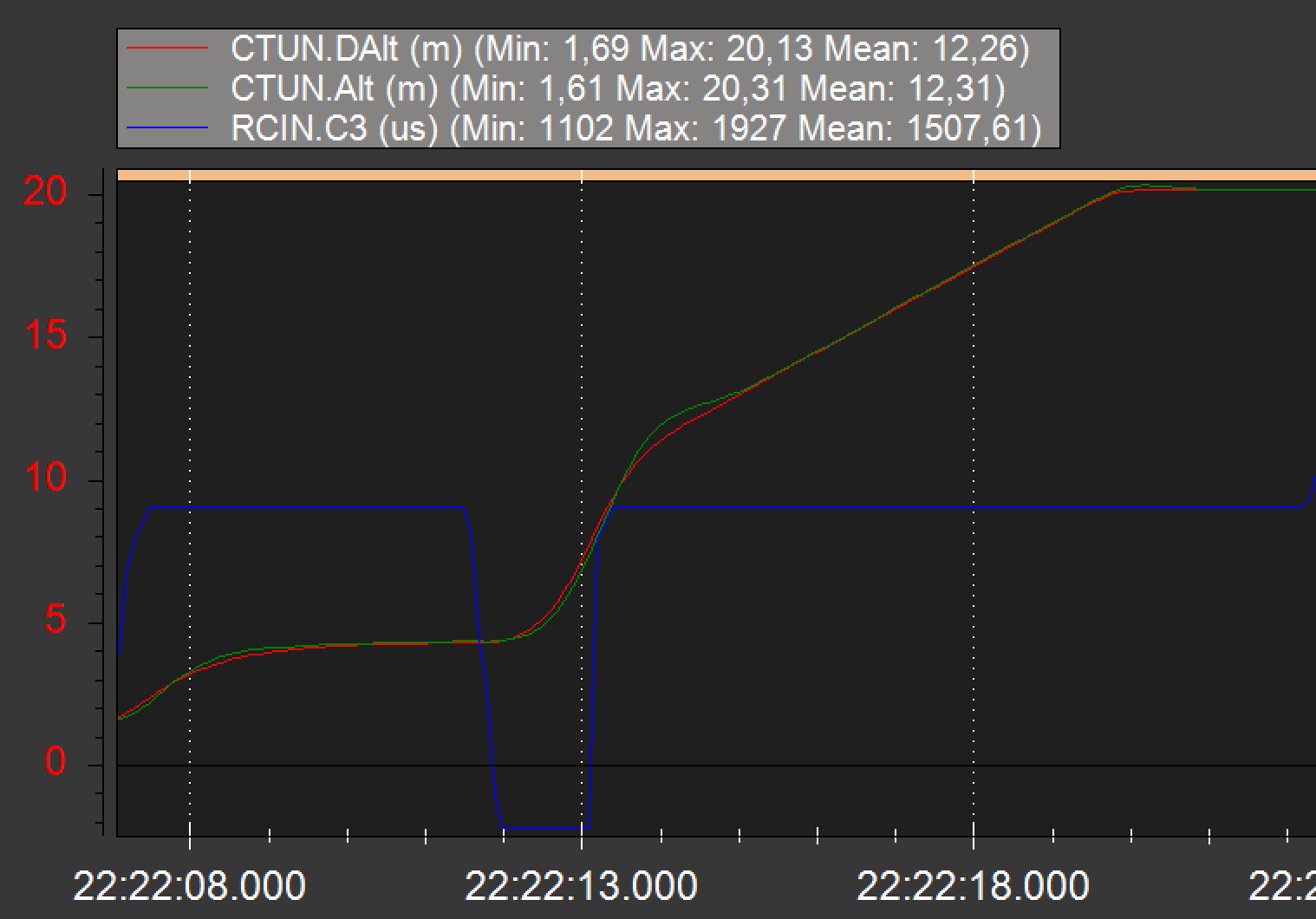
Until very recently it used to stop climbing instantly when letting go of the stick. Then I tried tuning descent overshot by increasing PSC_POSZ_P slightly and it started doing this. I set everything back to the previous values but the problem presists: After commanding a fast clim DesAlt keeps increasing for quite a while. My Z vibes seem fine and the behaviour seems almost digital, not out of control.