I saw the logs as loiter mode. Ardupilot version was old. Maybe, it caused that. I will solve vibration problem and setup tuning. Then, I will try again. I hope it will not be the same.
Hi, after balance the props and tuning, I made a flight. In the beginning, it looks fine. Then, the quadcopter suddenly started to turn on the yaw axis. I set the flight mode as alt. hold and get the control again. Then, it hits the prop and one of the props broke. There was no time to collect data and a notch filter.
I saw that vibration peaks suddenly. I can’t resolve what the reason is.
Can you help me with this?
Note: My landing gear is not good on this flight. But vibration is not very high continuously, it just peaks suddenly.
First set the MOT_BAT_VOLT_MIN value properly. Seems you forgot a decimal point. Set the Gyro filter back to 20Hz (INS_GYRO_FILTER) and if you want to take data to set the notch filter from set INS_LOG_BAT_MASK to 1.
Then make a simple hover flight in Alt Hold for a minute or so and get it off the ground several meters while doing so.
Thank you, yes I missed a decimal point. Why back to 20Hz? And if I set the notch filter correctly, will peaking vibration issue be resolved?
You followed the tuning guide correctly (I assume 12" props?) by setting the Gyro filter to 36Hz but in many cases this is too high for a craft that size.
The notch filter can help with some fundamental vibration issues so yes it’s worth doing. But, you need a craft that is basically flying 1st.
Yes, you are right. Props are 12". Thank you for your advice. I will try to get a successful flight more than 1 minutes. Then, I’ll set the notch filter.
I’m trying to configure harmonic notch filter but I can’t find the parameters about notch like “INS_HNTCH_MODE” and others. Only INS_HNTCH_ENABLE exists.
Is there a limitation for that? My flight controller is Pixhawk 2.4.8 and ardupilot version is 4.0.5.
Once you set INS_HNTCH_ENABLE to 1 the others will appear
1 Like
Thank you, it works.
I achieve a successful (at least no-crash) flight. Vibration peak frequency seems different for IMU and gyro. IMU peaks at 76 Hz and Gyro peaks at 92 Hz. Is it normal? Or maybe I can’t collect enough data (It is not a long flight).
Can I choose the center point as 80 Hz and bandwidth as 40? So, I think, 60-100 Hz will be filtered.
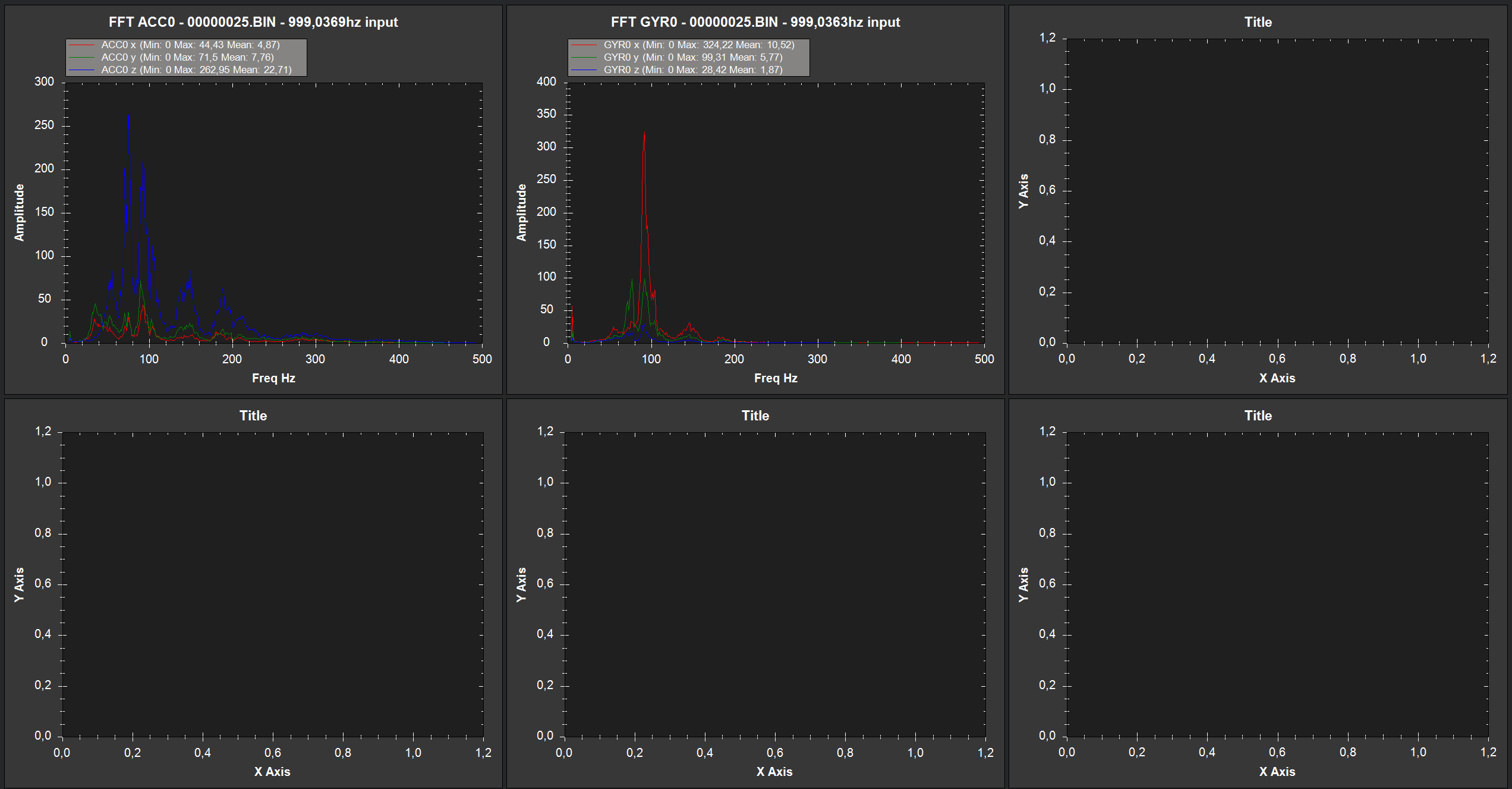
IMU (inertial measurement unit) is the suite of sensors. You mean the acclerometers show a different response than the gyro’s. The notch filter only acts on the gyro signal anyway. Post the .bin file.
I would set the center frequency at 92Hz, bandwidth at 45Hz and INS_HNTCH_REF to .125. Set logging to post filter and make another flight.
OK, thank you. By the way, in alt. hold mode, quadcopter moved left in roll axis slowly. When I set the mode as loiter, self-level is correct. What is the reason of that? I thought that center of gravity may cause this problem but I read that alt. Hold mode level the quadcopter.
Althold does level. It probably needs tuning. Now that you have the notch filter set run Autotune again.
1 Like
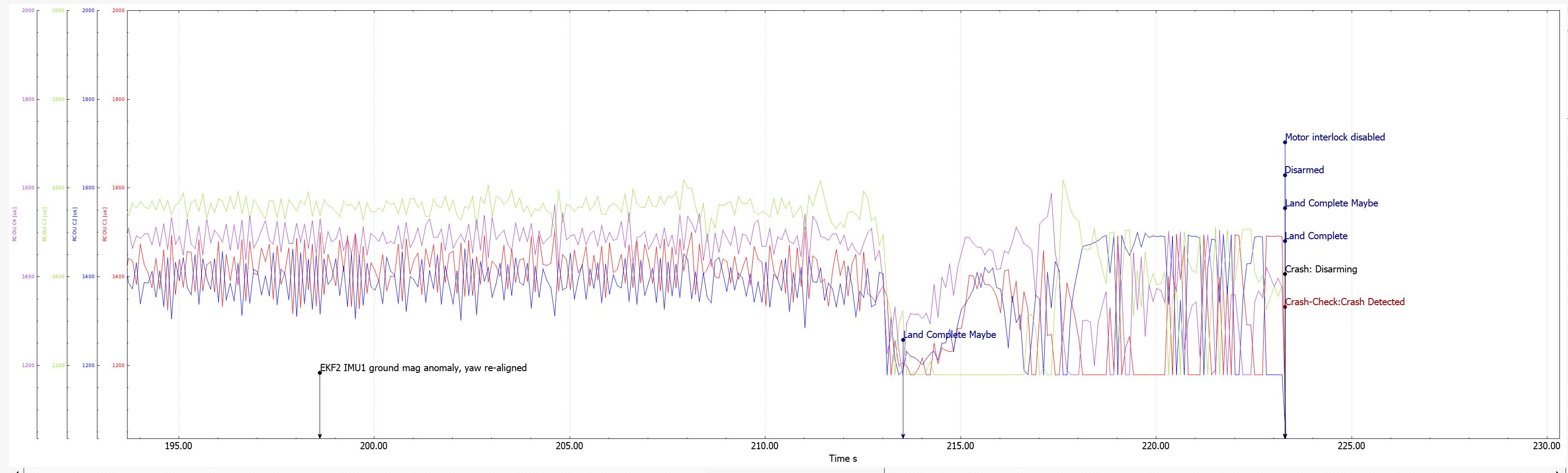
Hi, I performed another flight after notch filter. The quadcopter took-off and stay in the air for about 1 minute. In this process, there was a vibration (it was probably because of the PID parameter - We didn’t make auto-tune yet). Then a crash happened. It was a basic crash. When the quadcopter was close to the land like 50 cm, it moved front-left and one prop hit the land. Then it flipped. But I am not sure about it is because of me or another issue about the quadcopter. Can you help me to understand us?
Also, I applied a notch filter which is center 92 Hz and BW 45. But it seems like there is a peak level in 5 hz. it may be because of the change in the landing gear.
Nothing in that link.
Sorry for that, I updated the link.
Hard to say. 1st you have significant motor commanded output imbalance. Then you momentarily dropped the throttle and throttled up again. At this point the craft is still stable but I don’t know when it actually hit the ground.
What did you mean with motor commanded output imbalance? Is it prop balance or something else? There may not be another problem. Because it was close to the land and moved front-left. I wonder if there is a problem with vibration. It might be because of me. I am not sure.