I’m new to large drone builds and recently started flying an octa-quad with a takeoff weight of around 40 kg. I’ve flown smaller multirotors before, but this is my first time dealing with such a heavy platform, and I’m experiencing some issues I’m not sure how to resolve.
During the first test flight, the drone behaved erratically—wobbling and not responding as I expected. I’m attaching both a flight log and a short video clip showing the flight behavior so you can see what I’m talking about.
Here are the key details of my setup:
Frame: Octa-Quad
Motors: Hobbywing H11M
Battery: 14S 44,000 mAh LiPo
Flight Controller: CUAV X7 Plus Pro
RC: SIYI MK32
Description of the Problem:
On takeoff, the drone didn’t hold a stable hover; instead, it was wobbling noticeably, almost as if it was fighting itself.
Overall flight performance felt unpredictable, and I did not feel comfortable continuing the flight tests in this condition.
What I’ve Tried:
Double-checked motor directions and prop orientations.
Confirmed that the ESCs and flight controller are wired correctly.
Looked at basic tuning parameters, but I realize tuning this big drone is a completely different challenge compared to a smaller one.
Looking for Advice On:
PID Tuning: Are there recommended baseline parameters for heavy-lift octa-quads?
Vibrations: Could imbalance or vibration be causing these control issues? Anything in the logs that suggests vibration problems?
Power/ESC Configuration: Since I’m using Hobbywing H11M motors on 14S, any known quirks I should account for?
Flight Controller Settings: Is there a typical set of parameters or best practices for the CUAV X7 Plus Pro on a heavy-lift build?
General Best Practices: Any experience-based tips for first-time flights of large drones—safety checks, mechanical considerations, or calibration steps?
I genuinely appreciate any insights or suggestions. I’m aware that large drones can be much more sensitive to tuning and mechanical setup, so any guidance from your collective experience would be extremely helpful.
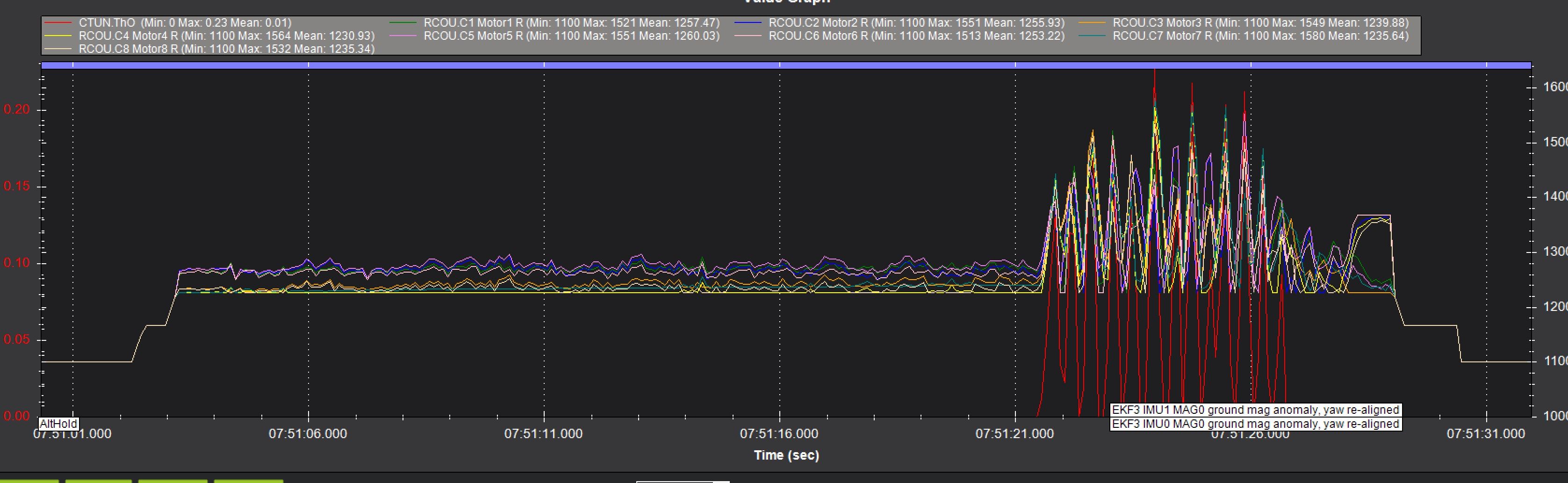
Not that different. One of the 1st things you would have looked at on your smaller craft was if there was output oscillation. What do you have here? Massive amounts.
Ardupilot documentation tells that when you have oscillations, reduce PIDs…
HOWEVER, the oscillations you have seem to come from lack of authority, i.e. the PIDs are probably too low. I was tuning a 6 kg VTOL setup and could not understand why the oscillations became worse and worse with reduction of PIDs… SO, you may try to increase the PIDs and check if it becomes better, but you still run the risk of the copter tipping over with a few props broken. Increase the PI by maybe 20 … 30 % to check it. Overall, if the problem is in low PIDs, you probably will have to hike them up 2 … 4 times higher than they are now.
BUT I MAY BE WRONG ABOUT PIDs being too low… so caution!
Whatever you do, bear in mind that there are no miracles, Autotune will not necessarily do its job well.
They are at default which is likely TOO HIGH but on a large craft such as this it’s not clear. And the Acceleration Z controller P&I gains are also at default so these are likely too high also. These combined are the primary reason for output oscillation like this seen on new builds. The Configurator will sort this or if you know how to manual tune getting control of it is rather simple. It’s actually a minor 1st step in the tuning process.
I will not argue here, because I have just one instance where the default values were way too low (my big VTOL), and it took me one day to figure out that…
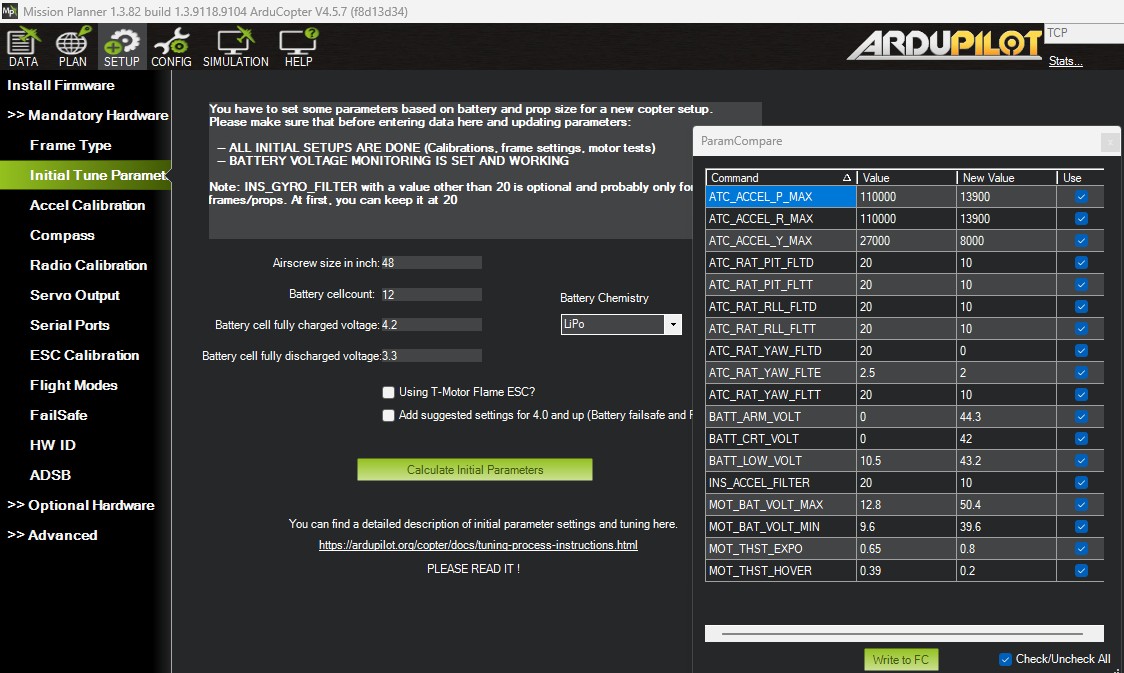
I am working on a large and expensive VTOL and plan to use the recommended software as suggested. However, I encountered an issue with the initial tuning parameters in Mission Planner. When I set the airscrew diameter to 48 inches in the tuning section, it didn’t suggest any updated initial tune parameters.
To proceed, I modified the initial parameters slightly, basing them on the values for a 40-inch propeller (the largest size listed on the ArduPilot website).
Could someone clarify if proper parameters for a 48-inch propeller are available or if there are additional steps I need to take to ensure accurate tuning for this propeller size?
I just installed the ArduPilot Methodic Configurator and started going through it. However, for a first-time user, it’s a bit overwhelming to see so many parameters at once. Does anyone have suggestions on how to gradually learn and manage these settings without feeling lost?
@dhruv11 When you use MP you often need to use the “full-parameter list” to do a one parameter change. Nevertheless it displays 1200 parameters to you.
a different menu for each task, some tasks have no menu, so you need to dig into the 1200 parameters
each task only presents you a relevant subset of parameters
parameter documentation
only on the full-parameter tree view
displays relevant documentation
makes sure you do not forget a step
checks that parameters get correctly uploaded
reuse params in other vehicles
unless you hand edit files
out-of-the-box
documents why you changed each parameter
tutorials and learning resources
scattered and not integrated
context-aware help integrated
Do it one screen at a time, and fully complete it before proceeding to the next. That reduces the feeling of being lost. Ask direct and specific questions, we can help.
I’ve been following the ArduPilot methodic configurator and have reached Step 16, where I need to adjust my PID settings using the Python script on GitHub. Since I’m not very familiar with Python or programming, could someone please guide me through the process.
Actually I have flown this drone on default PID, but it oscillated vigorously. Also the drone is too big and expensive so please suggest further steps.