First successful flight today, all be it tethered just to be on the safe side!
I seem to be having some Mag Field issues.
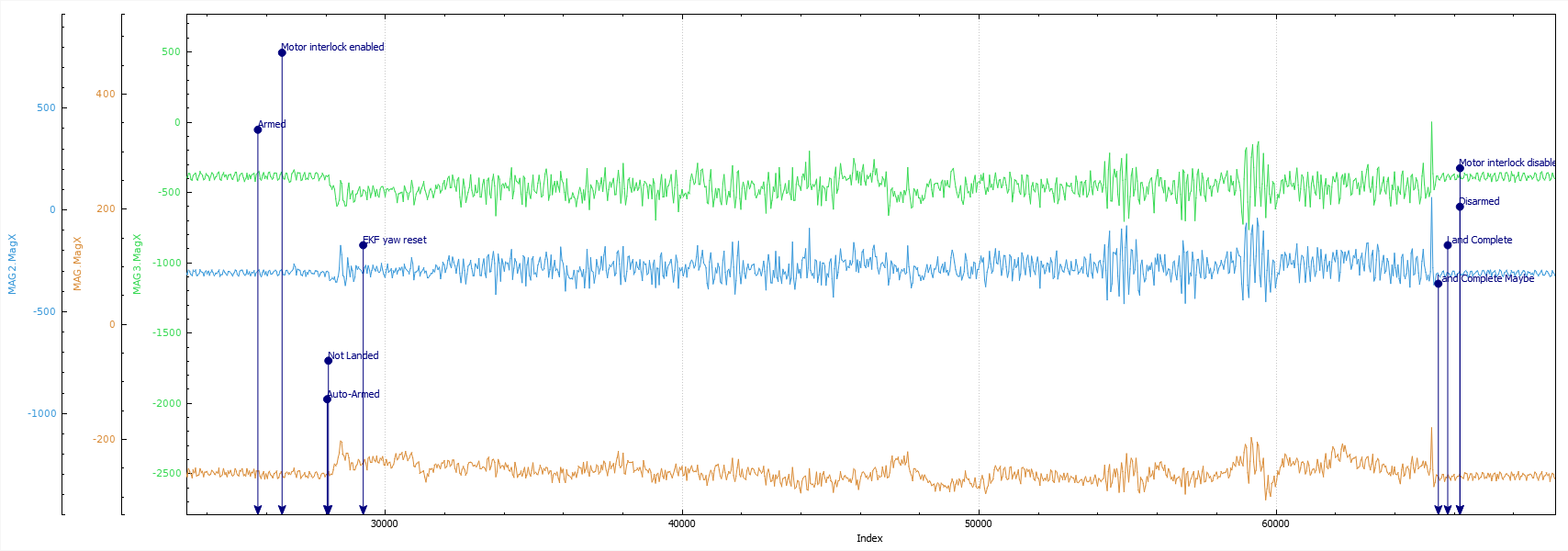
I was hoping that someone might be able to take a look at my flight log and see if there is anything that looks overly wrong. Help me understand what looks too high etc…
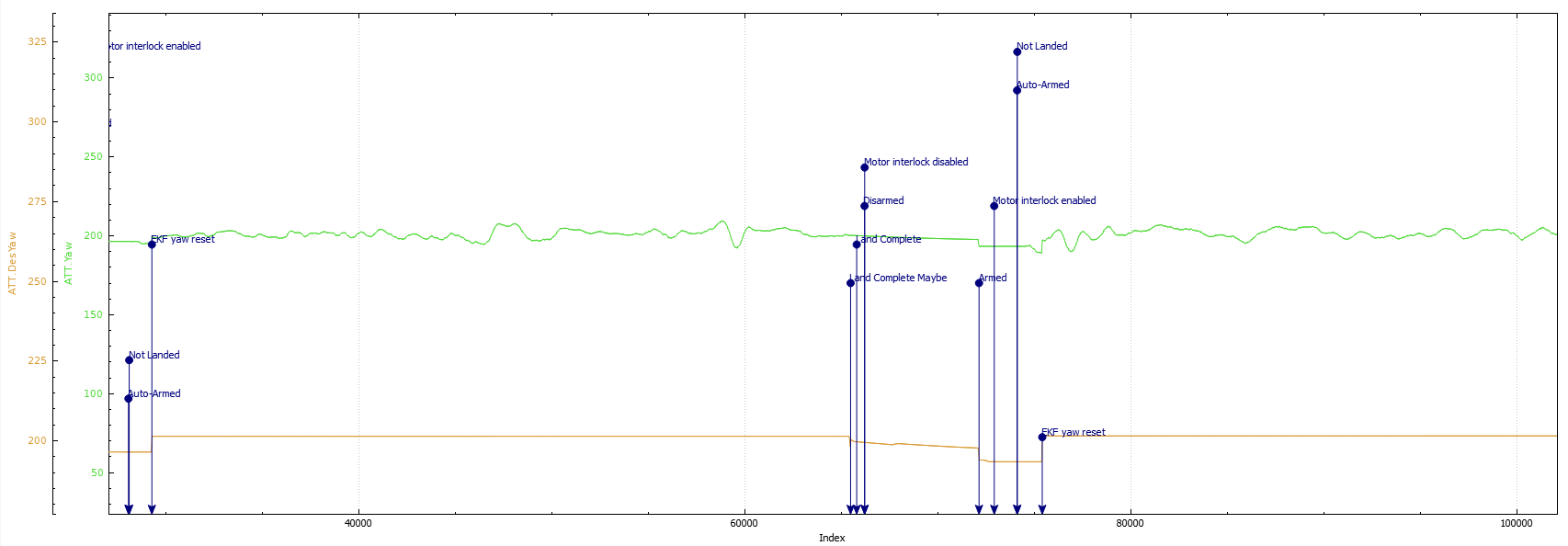
I am still struggling to get my heading to point in the same direction as my copter, always seems to be maybe 10 of 15 degrees anticlockwise.
OK
there is multiple problem with your copter
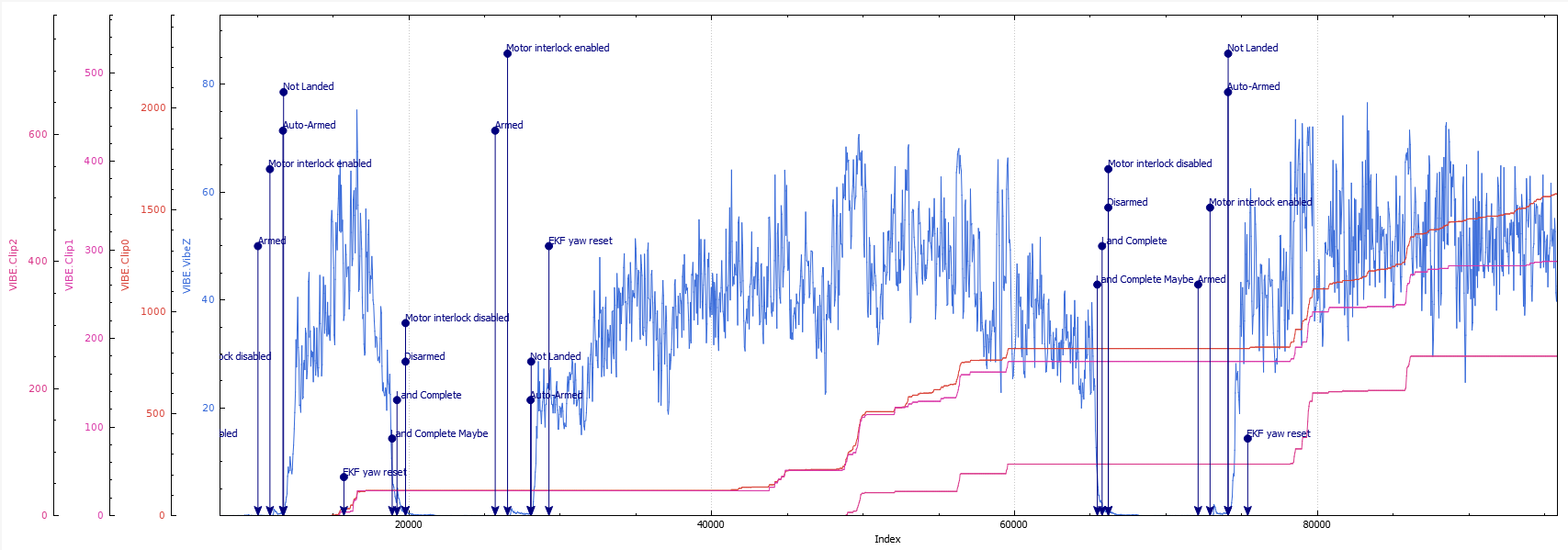
first you have high vibration in all axis with cliping! high vibration will affect IMU measurement and your copter will not be stable
as i found you are using Pixhawk 2 Cube and with Pixhawk 2 you don’t need to add vibration damper under it so check your arms (must not be twisted or flexible ), propellers balance and other parts to don’t transfer vibration from body to FC like wires
before removing anti-vibration mount check your arms (must not be twisted or flexible ), propellers balance and other parts to don’t transfer vibration from body to FC
flying with high vibration is totally dangerous , do test flight in a safe place and under 2 meter
note : first resole vibration problem ten go for auto tune
I’ve removed the vib mount and done another flight. Something seems to be off with the compass though, it never seems to point in the right direction no matter how many times I do the Mag calibration.
the only bad thing in this log is x vibration, its still high ! after solving this go for tuning process instruction but as i found its a single copter and i don’t know that is this different from normal copters or not i think the right person for tuning is @Leonardthall
As I am using Single Copter, I am using what would normally be the Z axis output from the accelerometer as my X axis. As the board is firmly fixed to the frame and that I have only one motor, any vibrations would be identical all be it out of phase.
It is my guess that either the sensitivity of the Z axis of the accelerometer is out or… Which I think is more likely, Ardupilot has not removed the 1G offset on the Z axis after the Custom -90 pitch rotation that I have my flight controller at.
That would explain why the vibration level is offset. The vibration isn’t more, it’s just offset by what I would guess to be 1G.