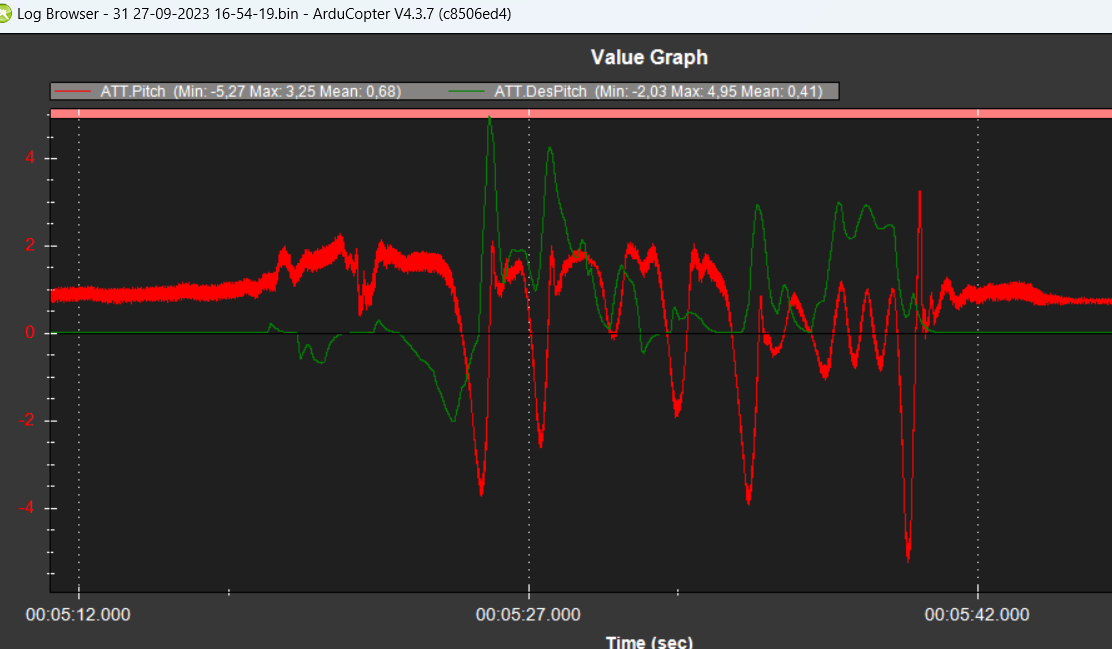
And after rpm is reached, I push slowly collective to shed the heli, and as soon it’s in air at 50cm from the ground, is enter in dangerous and not controled woobleing that make circular oscilations in the same direction of the rotor at 1,1 Hertz.
Hi @kuspower ,
there is no IMU message in the log, enable it in the log bitmask.
I would like to see what the gyro/accels readings are.
Also, follow the guide recommendation for setting up the filter specifically for helicopters.
Did you precisely level the swashplate (not just “by-eye”)?
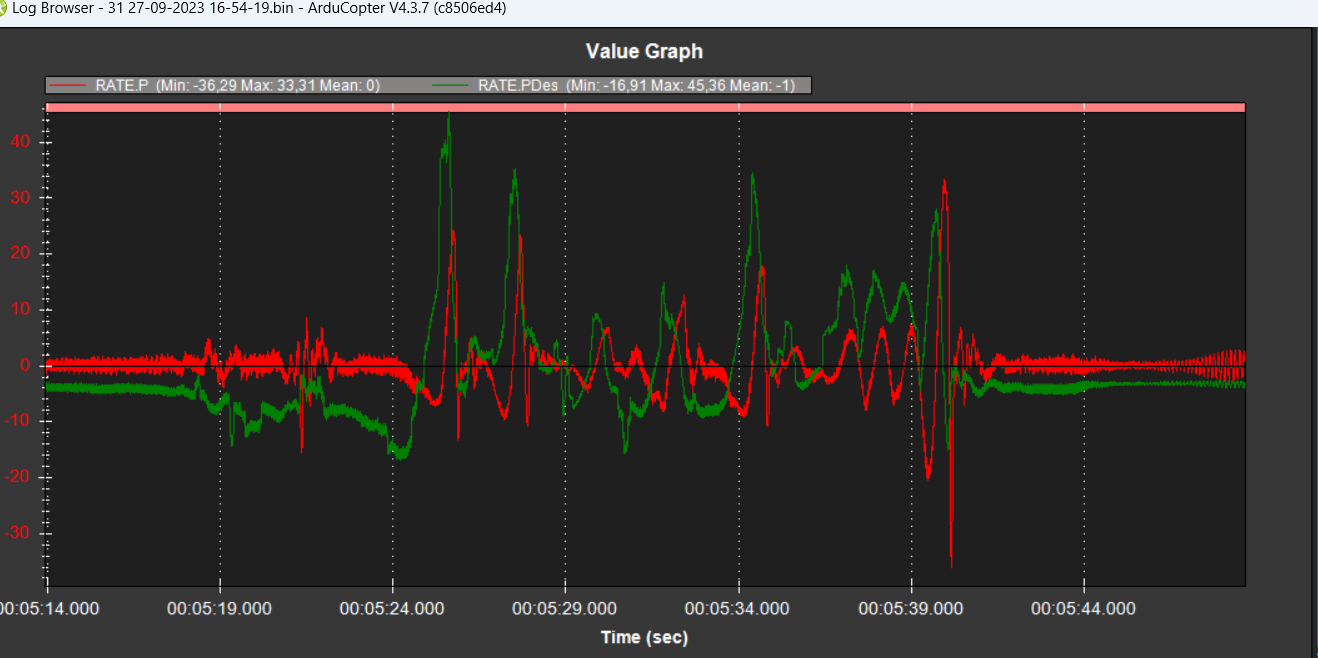
I would also recommend setting the fast attitude and PID in the log bitmask as well. This will give the RATE and PID log messages at 400 hz. Leave the medium attitude also selected.