Hi guys!
After building some copters, I have decided to try something a little crazy this time.
Short summary:
Plane: Parkzone Habu (EDF)
Goal: Learning / Fun. No Payload
Budget: As cheap as possible, many used parts
Experience: Built a quad and octo, both Arducopter
Long Story:
I came across a cheap (55€) Parkzone Habu (EDF Foamie) that I’ll equip with a Pixhawk and quad motors.
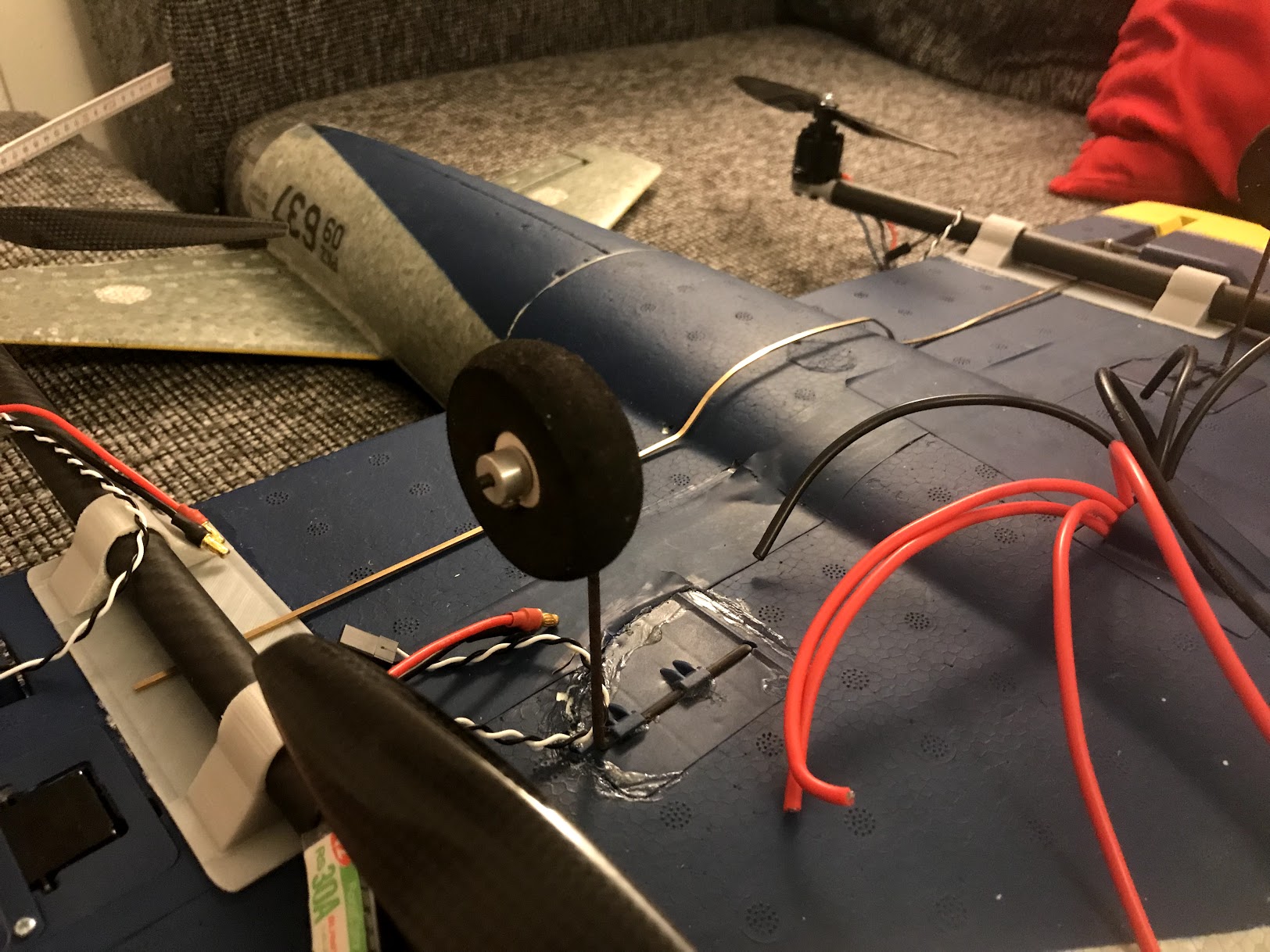
The rough setup looks somewhat like this:

Three notes, just in case:
1. Yes, this is bamboo in the picture, yes, I’ll use carbon tubes. I just had those around and tried out different configurations.
2. The aft arm is too close to the wing in the picture, I’ll make sure to have full prop clearance.
3. This is not the Tx I’ll use - I just didn’t have a spare FrSky one at hand for testing the servos & the EDF.
Here is the part list I came up with so far:
Electronics
- Pixhawk
- FrSky Receiver
- Whatever PDB I find
- 1x EFlite 60A ESC
- 1x Stock 69mm EDF
- 4x Racerstar 30A V2 ESCs
- 4x SunnySky X2212 980kV Motors
- 11Ah 4S 15C battery (if possible, otherwise 6.6Ah 20C)
Other things
- 4x 1045 carbon fiber propellers
- 4x 16mm carbon fiber rods (400mm)
- 3D printed motor mounts and other parts
On a side note, all of that comes in at 306€ - bought Habu, Pixhawk, Motors used.
Specs
- Empty weight before conversion: 980g
- Empty weight after conversion: 1.548g
- All up weight after conversion: 2.431g
ECalc results
Quad:
- Thrust/Weight: 2.2:1
- Hover Time: 18.3min*
- Current at Hover: 23A*
-
Current at full throttle: 106A*
*: I’m aware this will be much worse due to drag of the wing & fuselage
Plane (with added weight):
- Thrust/Weight: 0.56:1
- Average Flight Time: 14min*
-
Max Airspeed: 170km/h
*: Hopefully more than 5min / 100km/h with the added drag.
Experience
- Quite a bit of flight time on Copters, ~30h on RTF planes (no Ardupilot on the latter)
- Basic electronics, whatever you need to build a copter
- Limited knowledge of aerodynamics -> That’s why this thing will probably have more drag than a flying fridge
Problems
- Lots of drag: Quad Arms need to be perpendicular to fuselage imho: I can’t put rods through the air duct, without a rod that goes though the fuselage, the wings are too weak for arms. My current setup consists of two rods along the fuselage for stability and an arm at each end (with 3d printed T mounts).
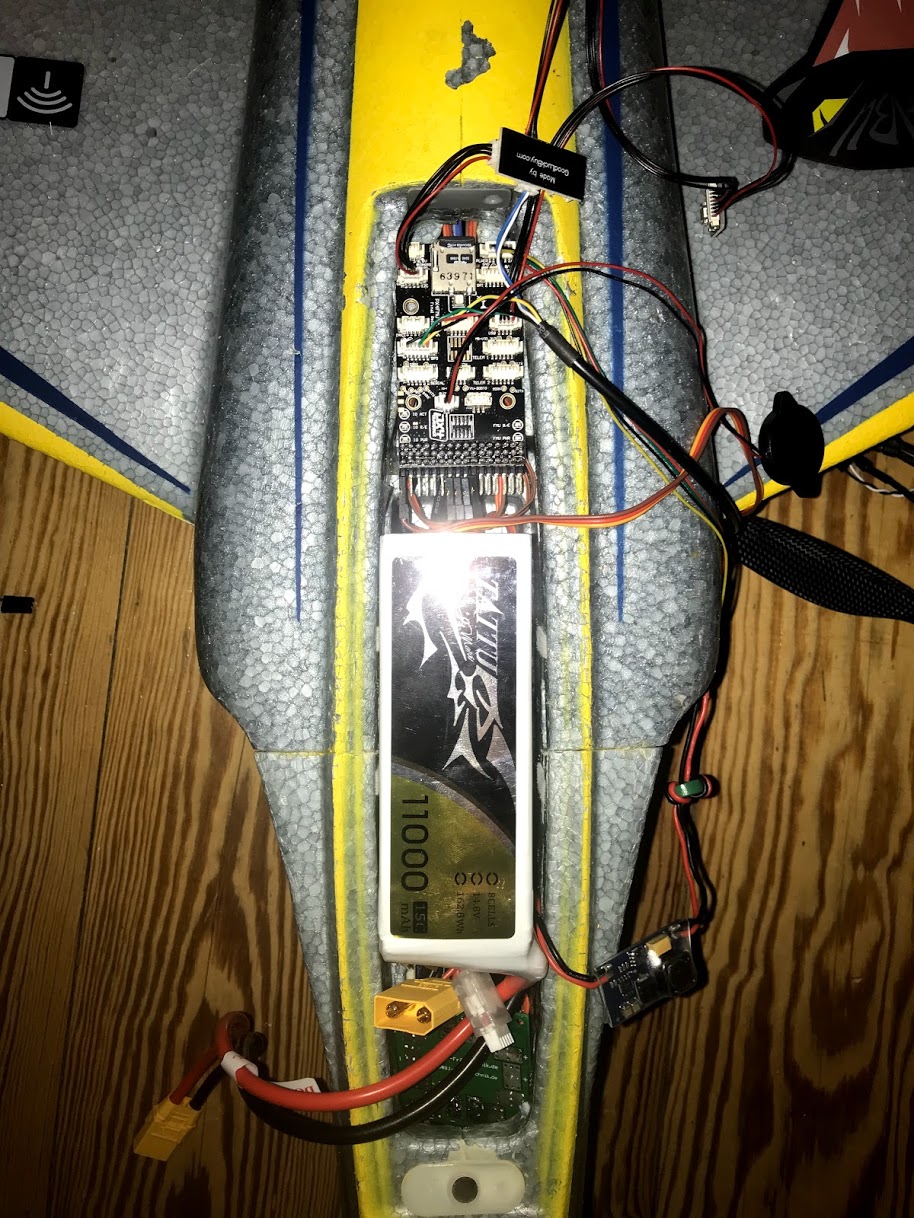
- CoM issue: Larger battery will make it nose-heavy. Original Battery was around 300g, new one will be 883g. Space is sufficient (after kicking out the plastic pilot), but CoM will be higher and further to the front. I know where the CoM of this plane should ideally be and marked it.
Summary:
I’m fairly certain this won’t be the prettiest plane, won’t have the longest flight times or any payload capability. But I noticed there isn’t any EDF quadplane, so I thought, why not try it?
Questions to You:
- Is the arm configuration viable?
- How many degrees forward should I tilt the motors?
- Is the CoM issue solvable? Or do I need to downgrade the battery?
- Has anyone ever built an EDF plane? I couldn’t find one.
I’m really thankful for any feedback!
Greetings from Hamburg, Germany
Oliver