It might be difficult to understand because it is posted to the English translation of the Japanese, but thank you about the advice.
The drone of GUBA QW350 you have already connected the APM planner 2.0.23.
PC OS in the MAC is 10.12.
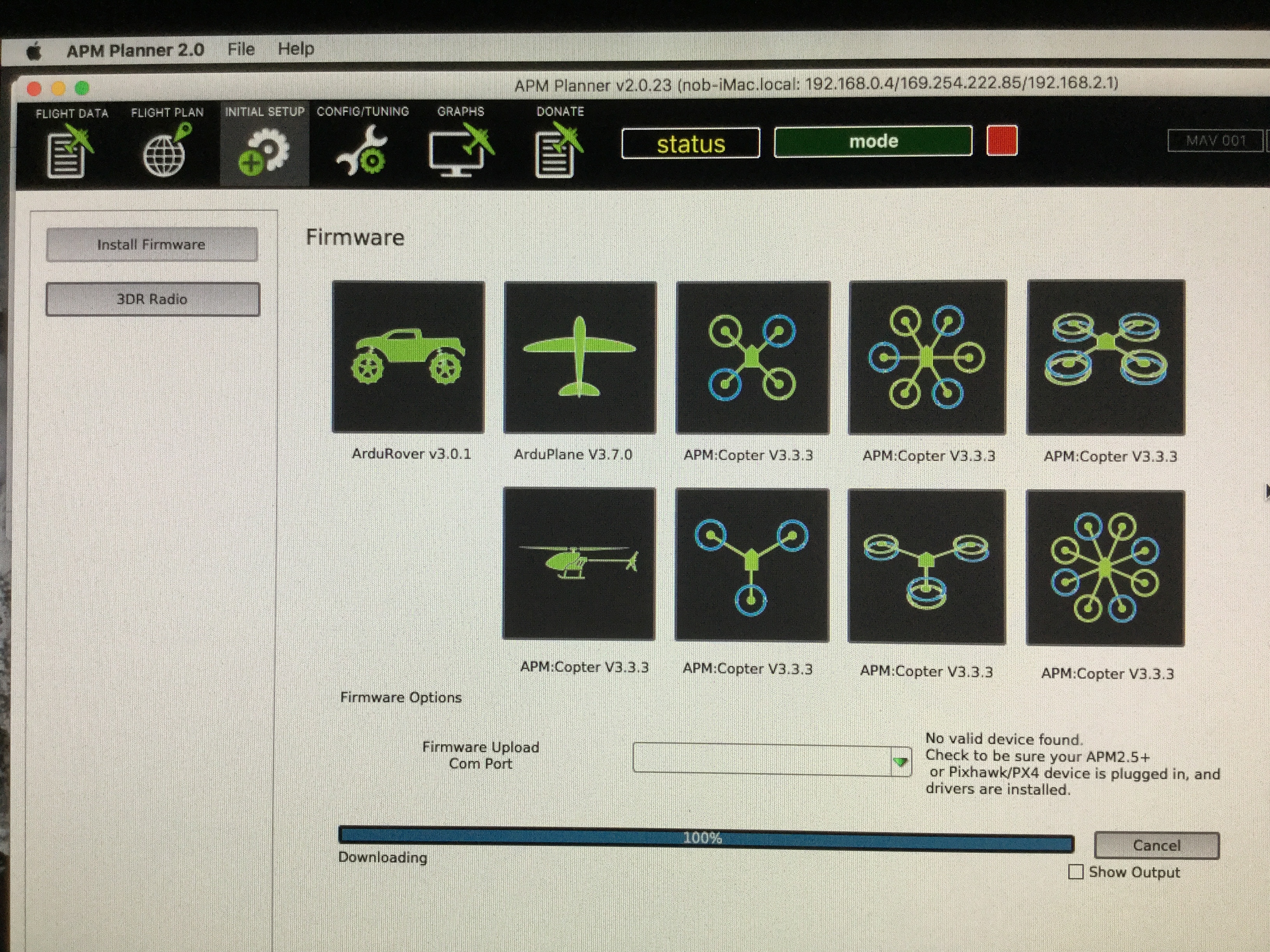
If you choose APMcopter V3.3.3 from install fimware comes out the following message.
「no valid device found.
check to be sure your APM2.5+or pixhawk/px4
device is plugged in, and drivers are installed.」
Do I How the correspondence?
The QW350 and MAC of the connection are using the FT232RL,
numbers, or the like to the Primary Flight Display if CONNECT is displayed.
Also it the following message which together with the above message appears,
but read up to 100% When you select the OK is done, you will not work as it is.
「you are about to install arducopter-v2.px4 for px4-quad.」
Firmware Upload com port How can choose if the, thank you much for your professor.
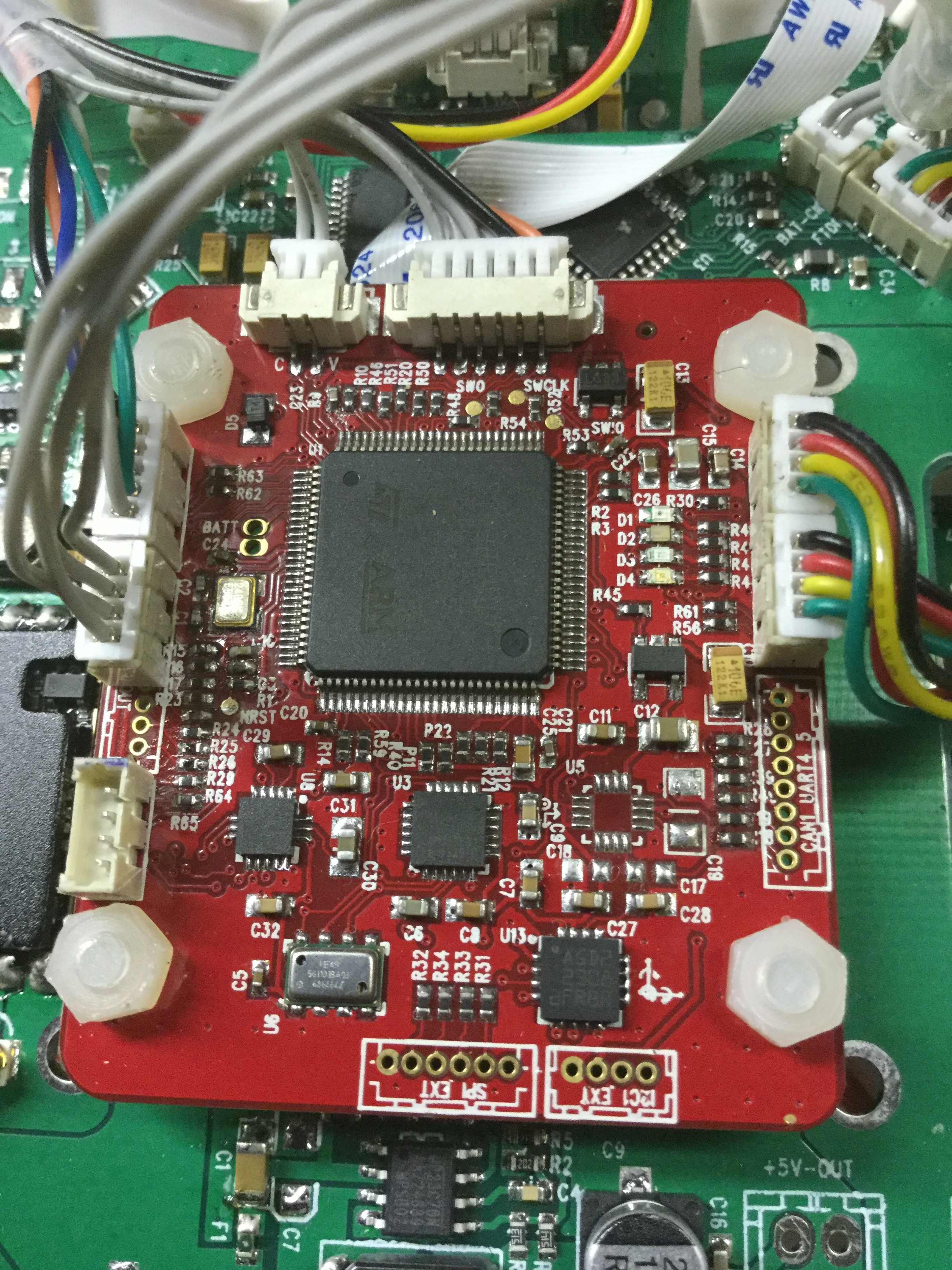
Wow, that a completely different board to the original one I linked to. I’ll need to di some research to see what autopilot that board is running? Is it even ArduPilot?
Hello friends , I have a trouble too with the same deone , with the same APM , my drone when turn up motors it spin on the floor and "walk in the floor , in the Mission planner appears a message bad rhs , bad ekf , compass variance , I tried to configure it but still the same ? I need stay in a open area ?? to so it ?? to configure compass Mission Planner have the menu- pixhawk / px4 -/ apm internal compass /apm external compass , wich of them ia the model for guba350 with red APM ?? the new guba brings new improvements, like the case , battery case and more , please help me , I’m near to destroy it and directly to the trash …