yep, tridge is freaking awesome! So glad he takes the time to post thorough posts that analyze and educate.
Not sure if this is specfic to this frame type or plane, but I am seeing ridiculously slow downloads. The last .bin file I uploaded took several hours to get about 80% complete. I finally stopped the download via USB at the three hour mark and extracted the SD card. I tried two USB cables and two ports on my computer with no perceptible changes in speed.
Any ideas?
What you observe is normal. The AvA logs were very streamlined compared to the APM logs. I always pull the flash card to retrieve logs.
3 hours with a USB cable is normal?
You should be getting about 150kbyte/sec with a USB cable.
The reason it takes so long with a quadplane is we use a loop rate of 300Hz (see SCHED_LOOP_RATE) parameter. Normal planes use 50Hz. That means logs are 6x larger. Also, I default LOG_BITMASK on plane to include fast IMU logging, whereas copter defaults that off (copter uses SCHED_LOOP_RATE of 400, but lower LOG_BITMASK rates).
I know that means the logs are huge, and I do intend to add a LOG_RATE parameter in the future which will allow you to dial back the maximum message rate. For now if you fly quadplanes then removing the microSD is really the only reasonable thing to do. Note that you can buy microSD extension cables to make getting at the microSD easy.
The high rate logs really help me diagnose issues in quadplanes more easily.
Got it! More data, better analysis. Sadly Birdseyeview has placed the flight controller right up against the center bulkhead, making the sd card completely inaccessible. And also precludes the use of and sd extender. I’ll get the logs one way or the other.
Tridge,
Thanks for the great analysis. I never put any thought into the CG. While I reconginze how important it is, nothing we did with the transition moved any parts so the CG should not have changed at all. I was flying without a payload or dummy payload as that is a permitted configuration with AVA. I did, however, take a look at the CG. If anything without the payload the drone is nose heavy. With the payload attached the CG appears to nearly neutral. More rigor in my analysis forthcoming.
I did test the 1 and 4 engines. I ran them up to 70% for 15 seconds. I also tested all the other motors to hear consistencies or inconsitencies in the engine sounds. They all sound a bit different so I can’t tell if one of the tail engines is under performing. I did pull the log file.The RCOUT for 1 and 4 were identical, so they are getting the same PWM input. I just downloaded a tachometer app. I have no idea if it will work or how accurate it is. I’ll give it a try and report back with the results.
Hope to fly it again tomorrow.
Thanks,
Dave
I made two changes, not sure which one impacted download speeds. I swapped out the 8gb card for a 2gb that was fromatted as FAT. Some have suggested that matters, others dont think so. I also added a 90 degree elbow USB connector to provide better, easier access to the USB port. Previously the port was very hard to connect to due to some wiring and other physical obstructions. Perhaps the connection quality was poor, leading to the exteremly slow downloads
Now I can download files in less than 5 minutes via USB. Easy day!
Another day in the field; two failed transitions. No crashes!
Did three flights today. The first one was soley VTOL. Based on Tridge’s input, I checked the CG of the airplane. The CG is forward. So I thought about what else might cause the appearance of an aft CG, which led me to the tilt system. I am thinking that perhaps the forward engines are tilted slightly aft of the correct desired position. Prior to switching to q plane we marked the physical position of the tilt mechanism relative to fuselage. The lines are centered, but I think a degree of difference might make a difference, which is hard to discern in a fat line. And we set this angle with an inclinometer according to manufactuer specifications of .7 degrees. Perviously I set servo11min to 1055, however the first hover flight the drone was drifting forward into the wind, so I dailed servo11 min to 1015, which seemed to arrest forward motion while in q hover.
So the first flight was dedicated to test this theory. We mapped servo11 to RC9in, which was mapped to a pot on the reciever. Set the initial PWM value to 1015 (same as servo11 min when servo_11_function set to 41). I took off in qhover expecting to see the drone drift aft, but didn’t observe that. I recognize the aft motors may be increasing thrust to compensate. As we increased altitude the wind picked up and again, I expected to see the drone drift with wind. I didn’t it stay in roughly the same position. To me this suggest the tilt is to far forward if anything. W’ell devise a jig to nail this down definitifley. Sorry for the empircal data.
Not sure what eles could cause the CG to appear to be aft when its neutral to slightly forward.
Anyway, perhaps foolishly, we tried a transition, this time in FBWB. As a long time pilot my brain just doesn’t control altitude with throttle, which is why I choose this mode. Immediately upon selecting FBWB the drone departed controlled flight. While sporty, she recovered fairly well and no soiled pants.
Feeling adventureous and attempting to comply with recommendations, we attempted another transition. Same thing: immediate departure of controlled flight and a decent reovery.
Based on Greg’s observation of a slower than normal looking transision, we set the tilt rate to 30 degees per second. Maybe we should dial it back to 20?
Also wondering about trim_throttle setting. Tridge and Greg’s are set to 35. Does this paramter need to change with a 6s setup.
Here is the log file. Probably gonna look similar to the last flight.
This log file is from the 3rd flight, where we stayed in q hover and commanded forward and right and forward and left. While the response wasn’t swift, definitely observed the plane moving in the commanded directions.
\https://www.dropbox.com/s/g3bse1bkw401g4t/2017-10-11%2010-59-05.bin?dl=0
From here we will recalibrate the tilt mechanism and again check the CG. Other than that, not sure what else to do.
Suggestions and thoughts happily welcomed.
Thanks,
Dave
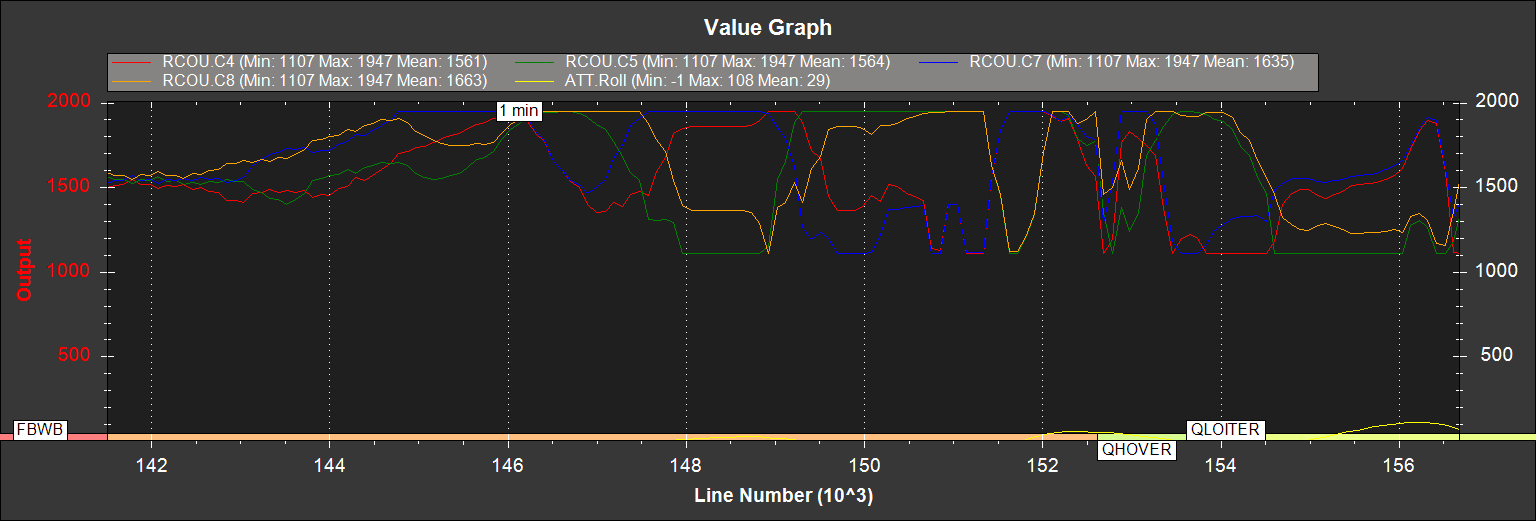
Looking at the logs, channel 4 and 7 decrease output as 5 and 8 saturate, causing the the right wing to drop off, then the left and right side are working out of phase. I don’t know how the control laws work but this behavior seems odd too me as it doesn’t apear to be a response to the right wing being high.
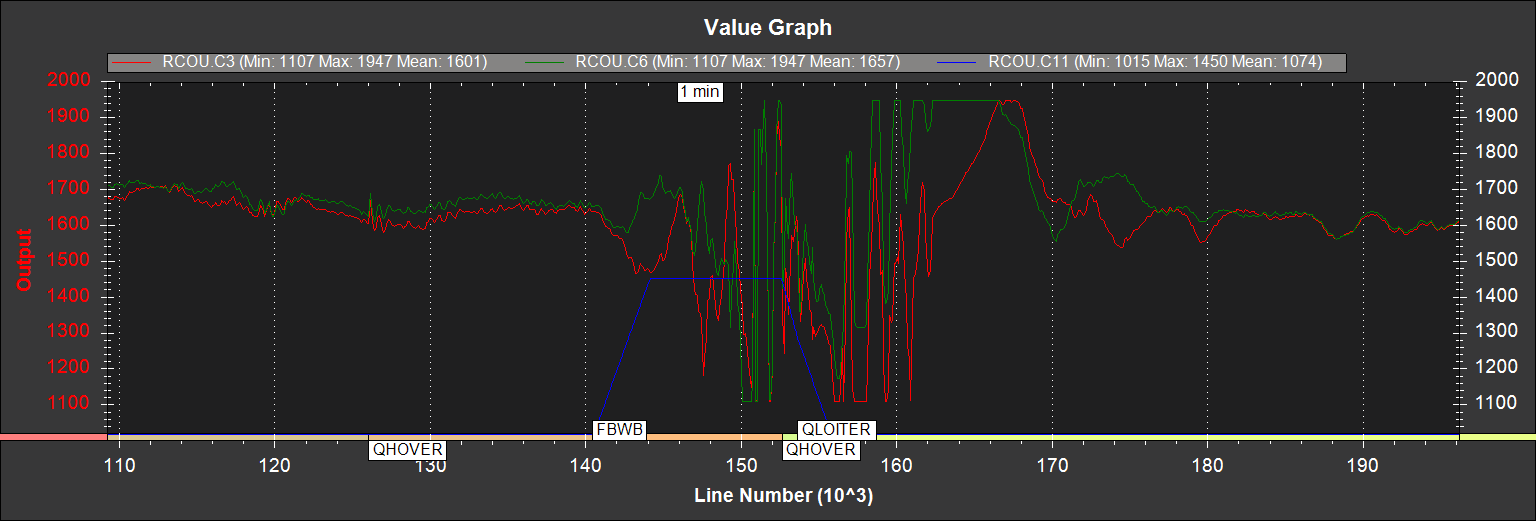
Similarly, this graph perplexes me. I would expect the two tail motors to work in phase, but initially they are out of phase, not sure why the top tail rotor would decrease while the bottom increases. And as we hit q_tilt_max the tail rotors increase speed instead of decrease as I’d expect.
This may be perfectly normal behavior, but is contrary to my expectations.
I have only ever eyeballed my FireFLY6 setups. Hover mode points the front motors up in parallel with the tail motors. The alignment is not critical as the FC compensates for offsets. Forward Flight mode points the front motors in-line with the fuselage. Again, the FC compensates for level flight automatically.
No, the 3s or 6s power system doesn’t matter here.
I’m not seeing any issue here. From the image below, the orange (QLOITER, yellow (QHOVER), and green (FBWB) modes at the beginning of the flight all look good. Perhaps I am not understanding your definition of “controlled flight”.

Greg, thanks for taking a look. By controlled flight I mean the FF6 responding to inputs from the RC. Seconds after the transition to FBWB or A, the plane rapidly rolled off and started to spiral to the deck.
Dave
Tridge,
Again, thanks for all your help.
As requested here are the deflection measurements of the elevron control surfaces. I’ll only list the right side as the left are the same.
In manual, centered stick, approximately .5 inches up. It was trimmed to this position per manufacturer’s recommendation, found here. This manual is for the DIY FF6. So it’s possbile these aren’t applicable to this model.
manual, full right stick 1 inch up
manual, full left stick .5 inch down, a full inch from the neutral position.
All measurements are from the top of the foam on the wing to the top of the foam on the elevron.
Please let me know if you need anything else.
Thanks,
David
I am wondering if the elevron neutral position is causing the wing to stall as it transistions to plane causing all the inexplicable graphs.
David,
I would like to check the flight controller compensation in FBWA mode. Also, I recommend that your next flight attempt use FBWA with 2/3 to 3/4 throttle during the transition into the wind. Using FBWA, you can control altitude with either throttle or elevator sticks or both. In this manner, if the plane starts going higher, you can control it back to the desired altitude. Also, transitioning back to hover modes should also be done into the wind. By using 66%-75% throttle during the transition to forward flight into the wind, the plane will be virtually stall-proof.
From the Elevon Planes section of the Wiki, in the Servo Reversal section, verify correct movement for an elevon plane using the table. This is done in Manual Mode.
Next, in the Confirm Servo Reversal section, switch the plane to FBWA mode and with the transmitter sticks centered move the plane per the table and verify correct movement.
Thanks Greg, all the control surfaces are moving in the correct directions in all modes. Not sure why my ff6 is having such a hard time and yours and Tridge’s are transitioning without problem. I did increase Q_TILT_RATE_DN to 30 instead of your 20. Based on my assesment of the logs, the plane is stable through the transition to Q_tilt_max.
I suspect the wing is stalling because the nose is being held up with excessive upward elevron.
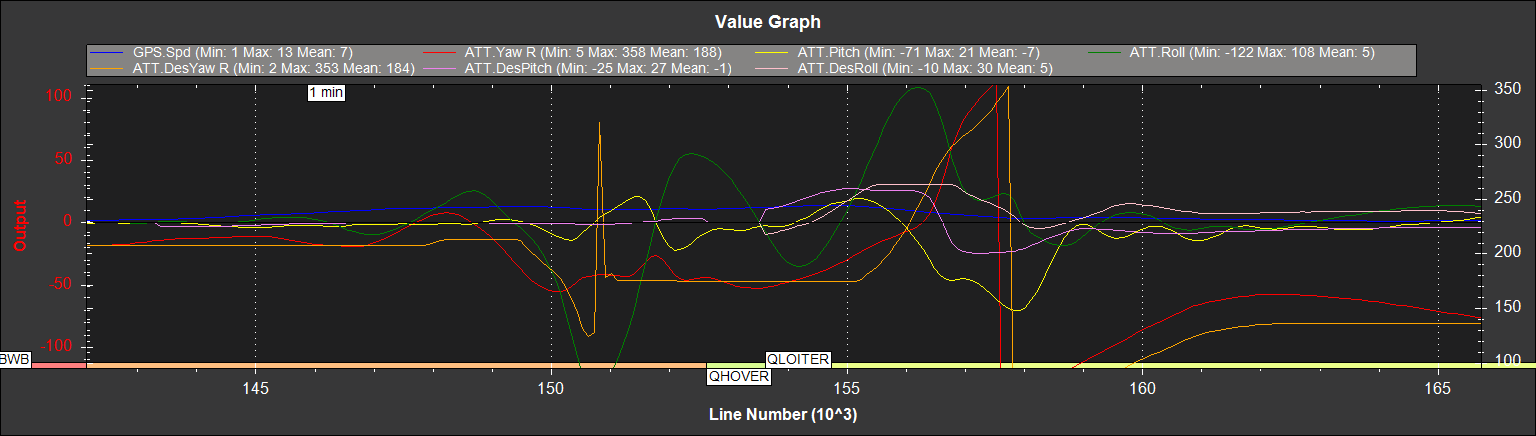
This is the graph I used to conclude the airplane is stalling. I think we have insufficent airspeed for a nose level pitch attitude, causing the wing to stall. Starts with a little roll and side slip then off to the races.
Other interpretations happily welcome
Another day in the field: four flights, three failed transistions, and finally our first sucessful transistion to plane and back to copter.
Prior to going to the field I physically changed the deflection of the elevons so they were aligned with the airfoil of the wing. The gross adjustment was done with changing the linkage and the last 1/8" was done with servo1/2 trim values - both were modified by 10, one positive, one negative consistent with one servo being reversed.
We climbed to a safe altitude and attempted a transition. The FF6 accelerated but wobbled out of control. She recovered well and we tried it again using FBWB with the same result. Excited we made it further down the transition, we speculated that it needed to transistion to plane quicker. To do this we set ARSPD_FBW_MIN to 12. Repeated the above with futher progress, but she still wobbled out of control.
We landed the FF6 and set ARSPD_FBW_MIN to 10. From the graph above I was fairly confident the stall speed of the FF6 is right around 8m/s. So we tried it again with success. The transition wasn’t graceful and appeared to be on the edge of controlled flight but she made it through to plane.
Once we were in plane the airplane flew ok. I was mostly turning right. When I attemped to roll to the left the airplane began to wobble, so I continued the turn to the right and having enough fun for the day, transitioned back to copter and landed. I don’t remember much about the transistion to copter.
Upon landing I noticed both elevons were deflected up approximately 1/4 of inch from the position I set. Looks like servo_auto_trim reset the trim value by about 10 PWM. Also, the logs reveal a fair amout of altitude fluctuations due to ptich changes. I don’t remember much from school but this looks like a classic phogoid. Not sure if we can dampen that with PIDs.
Overall I am very pleased with how the drone is flying in copter. Great lateral control, great yaw control (perhaps too much) and fair pitch control.
Definitely need some help figuring out how to tune up plane.
Here is the log file from today’s flight. https://www.dropbox.com/s/f4ve30wftyncmpw/2017-10-12%2014-04-04.bin?dl=0
I love this community and grateful to all those that helped make this happen. I look forward to making the FF6 better with your input and recommendations.
Thanks,
Dave
Another day in the field with mixed results. Multiple transition attempts with two successes.
The test plan today was to improve the transition from VTOL to plane and once in plane do an autotune…never got to the autotune.
During yesterday’s successful transition, I observed lots of tail wagging as the FF6 transitioned from VTOL to plane. So today’s goal was to reduce this by changing Q_tilt_max and q_tilt_rate_dn. Really didn’t find a combination that worked as desired. Perhaps I need to adjust some other parameters. What I did conclude is the only way to successfully transition is to have forward airspeed in copter prior to starting the transition. Maybe this will alway be necessary but with AVA I could transition from a level hover to plane without touching the throttle or forward velocity. I’d like to find the right combination of variables to do the same with plane.
When I did get to plane, it flew poorly. The goal was to do an autotune to tune it up. But everytime I tried to turn left the airplane refused to comply. The elevons are trimmed the same and have equal throw and the plane is weighted symmetrically along the longitudinal axis so I am puzzled by this behavior.
Upon landing after the second flight, I observed considerable vibration as I approached touch down. It look like the airplane was bouncing up and down a few inches. I looked at z vibes and the looked ok. But I did note divergence in PIQP. I haven’t observed this behavior on previous flights.
Any insight is apprecated. Here is the log from the flight. https://www.dropbox.com/s/1zwqy4642n2n4xa/2017-10-13%2010-47-58.bin?dl=0
Thanks,
David
My second flight of the FireFLY6 using APM Plane v3.8.2 was as good as the maiden flight. Transitions seemed flawless and I had better turning capability than when using AvA because it can be set to the user’s needs.
I took off and landed in our tiny mowed opening surrounded by hazards. Once airborne, I had a large wild field to fly over. Landing can be tricky when the wind is blowing because the take-off and approach are from the same direction. Other than a little prop turbulence during my descent, the flight was great!
2 Likes