Thanks for the update. I started the transistion to Ardupillot last night, so I am happy to hear everything went well.
A few questions as I am new to Qplane;
Why use Qstablize instead of Qhover?
Why do you need more space in qloiter than in qstablize? I am inferring that from a previous post. It seems a GPS stabilized mode would take less space.
QSTABILIZE (like Copter STABILIZE) does not use BARO or GPS so the pilot has full control. It’s always best to use this mode first before testing sensors. It also gives you real-time control of the throttle level so if you have both copter and plane flying skills then you are in your comfort zone. QHOVER (like Copter ALT_HOLD) does hold Altitude using the BARO sensor (once you’ve tested it) but it greatly softens the throttle control so that center throttle means keep the same altitude and max throttle is rise up slowly. In close quarters or windy conditions, this can be problematic.
It all depends upon your GPS conditions, wind conditions, and room for error. Unlike symmetrical copters, QuadPlanes and tilt-rotors may not like wind from all directions. My mini Talon and Bix3 are pretty good in some rear wind but the FireFLY6 wing isn’t happy if it is in QLOITER mode with wind at its back. I crashed my AvA FireFLY6 in the same area because I didn’t account for a take-off with wind at its back. It took off in copter mode fine but turned 180 degrees before transitioning to forward flight and flew into a 80’ pine tree. Lesson learned the hard way! Always copter out to a clear area before transitioning.
To give you an idea of where I flew my test from today, watch this video that I made using the AvA firmware.
Here is some information from my maiden test flight. I don’t have current running through my 3DR Power Module so the logs only display voltages. The stock power distribution board that they use makes it difficult to run current through the PM.
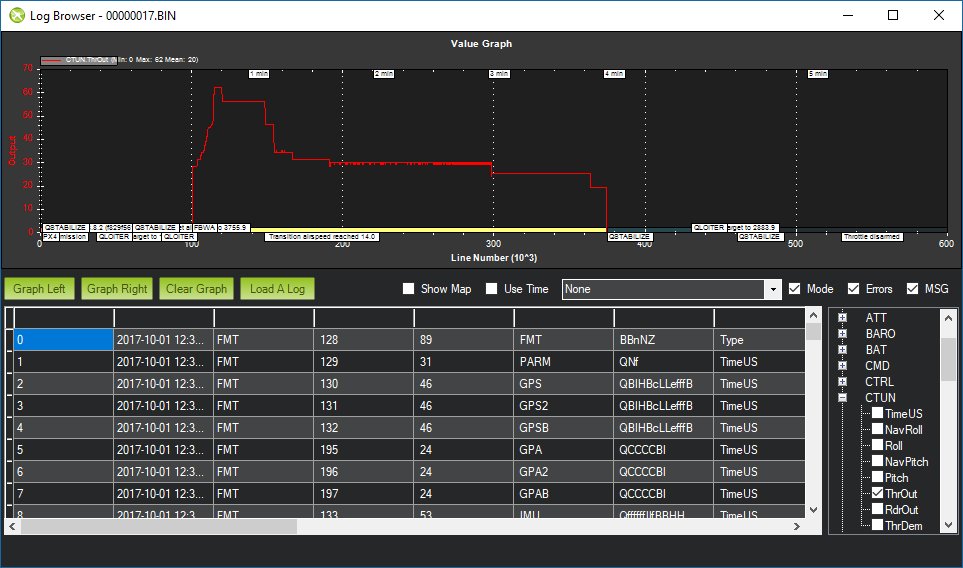
On the forward flight throttle out graph, you can see my excitement on the throttle stick for my first transition and then I settled down after the first turn to less than 30% throttle so I was happy with the power level.
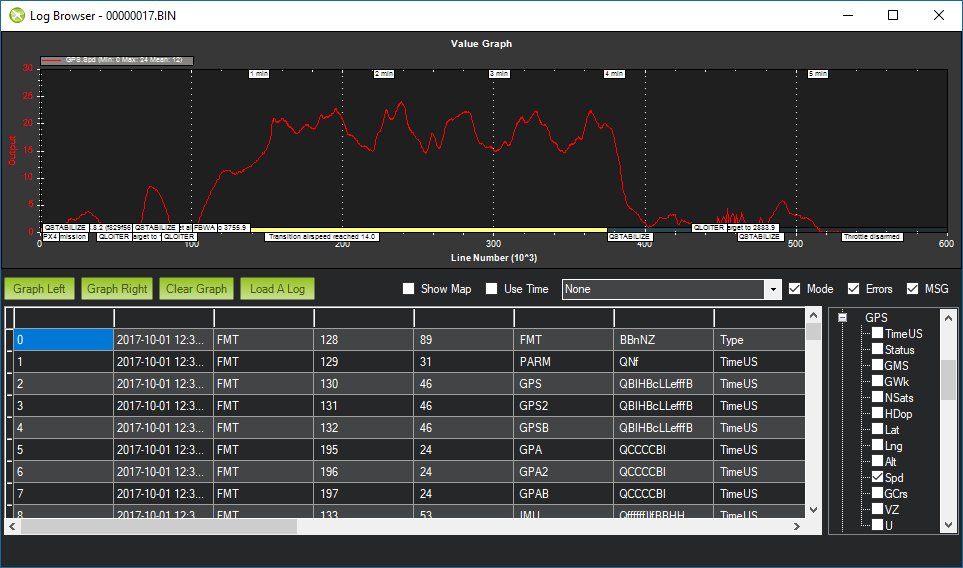
This last plot shows my mode changes at the beginning of the flight and the tiny mowed area that I took off from next to the barn. Orange is my take-off in QSTABILIZE mode, yellow is my first QLOITER mode test. I decided I was good to go so I switched back to QSTABILIZE (in green), to move out and up faster, and back to QLOITER (in blue) before the first transition to FBWA.
one thing of note is that in fixed wing flight you are a bit tail heavy. The SERVO_AUTO_TRIM code ended up learning SERVO1_TRIM=1561 and SERVO2_TRIM=1436, which is about 12% down elevator.
You are also tail heavy in hover, as shown by PIQP.I, so I’d recommend adding some weight up the front. If you do that, then re-center your elevons trim before the next flight (it saved the learned values).
I’d also suggest raising PTCH2SRV_P. The log shows it was at 1.1, and I think you should try 1.8 to start with. It was having trouble tracking in pitch.
Is there some reason you had EK2_IMU_MASK=1 ? It means you only ran a single EKF lane so we can’t easily check the attitude accuracy.
Cheers, Tridge
Thanks for the analysis. I’ll make a CG change and change the parameters. This was the first flight with my new 4AH Lipo packs. They seem to weigh an ounce lighter (each pack) than the Multistar 5200mAh packs so that’s a 2oz change. I doubt that created a CG change.
I suspect that the EK2_IMU_MASK difference was an import error from reading your file…which has it set to 3. Perhaps the import doesn’t like the Pixhawk2 format using 6 decimal places and a tab compared to the Pixhawk1 integer and comma.
You were right about my FF6 CG. It was about 10mm or 3/8" aft so I added 1.75oz to the nose. It’s on the CG now with the gear down so it may be a touch aft still but better. I reset SERVO1_TRIM and SERVO2_TRIM to my previous starting points in the GregsFF6wAPM_Hover2.param file.
I also changed:
PTCH2SRV_P from 1.1 to 1.8
EK2_IMU_MASK from 1 to 3
Lastly, I’m checking my prop adapters for tightness again.
I’ve been heads down working on the conversion to QuadPlane. Thanks to your great work, my biggest challenge was figuring out the Taranis logic switch. We recently decided the Taranis with Flight Deck Pro will be are default RC. So we are incorporating it as we transition. After figuring out my logic switches and selecting my modes, I was happy with how the FF6 responded in Quad and Plane. Then a calibrated the ESCs and took it outside for a more thorough test. Couple observations that I’d like some help understanding and fixing: As I transition to plane, the #3 engine stops. Then all of the motors seem to slowly decline in RPM.
I suspect the ESCs are calibrated improperly and or #3 may be going bad. I followed the VTOL ESC calibration procedures, but never got a tone upon power up.
Thanks for taking a look. I’m not ready to fly it just yet. I want to understand whats going on when I transition. Don’t seem to have any problem in q hover or q stabilize but apprehensive to fly due to concerns about escs
The RCx and SERVOx parameters are independent of each other. The RCx parameters are set during the Radio Calibration in Mission Planner under Initial Setup…so don’t change them unless you make radio transmitter changes, then you can run the Radio Calibration in Mission Planner again.
Remember that I changed Q_M_PWM_MIN from 0 to 950 (because 1000 didn’t work) to get my 6 ESCs to arm so if yours continue to beep after pressing the Safety Button, give it a try.
Thanks Greg,
My ESCs are arming properly. They spin up and seem to work as expected in q hover and q stablize. But when I got to plane, they start acting weird. I am wondering if flight controller is confused because A/S is equal to 0. Thinking I might set ARSPD_FBW_MIN to 0 for an on ground test.
As I think about my previous post, I guess the only RC channel input that matters is Throttle.
When you say set fame class to 5 and frame type to 11, I see the Q_Frame_class of 5 but I don’t see a setting in Q_Frame_type of 11 just 10? Is that because MP hasn’t been updated to show the new settings?
Thanks a million to Tridge for making this possible, our firefly has been in the case for 3 months because of the downfalls ava had!!! This is a great platform and even better now that we can use all the features MP allows!!!
it’s because I forgot to add it to the parameter auto-docs, which MP reads from. I’ve fixed that now. Meanwhile, you can set 11 in the advanced parameter list.
Tridge, thanks for the reply. Sorry for the completely unscientific and useless discription of weirdness. When I transition to plane, the top left and bottom left esc stop spinning. However this behavior has been insconsistent. Sometimes its the top left and the back bottom. Sometimes it’s the top left and bottom right. Everytime I transition to plane, I hear the motor RPM slowly decay (which might be normal as plane is more efficient and requires less RPM). But the arbitrary nature of motors stopping is disconcerning. I expect the back two motors to stop but not any other motors.
I tried calibrating the ESCs with q_esc_cal 1 and 2. I never got good tones on power up. So I manually calibrated each ESC and got the expect high and low throttle tones.
It seems like the Tilt bitmask may be wrong. I compared my param values to yours and gregs and the bit mask definitly matches. I triple checked my engine wiring, which all seems to be good.
Engines arbitrarily stopping kind of freak me out.