The copter continued the mission successfully - and I repeated it again right after this mission concluded - no further problems.
I would like to see how much I can learn about the cause of this lane switch. - to see if there’s anything I can do to prevent it’s reoccurrence.
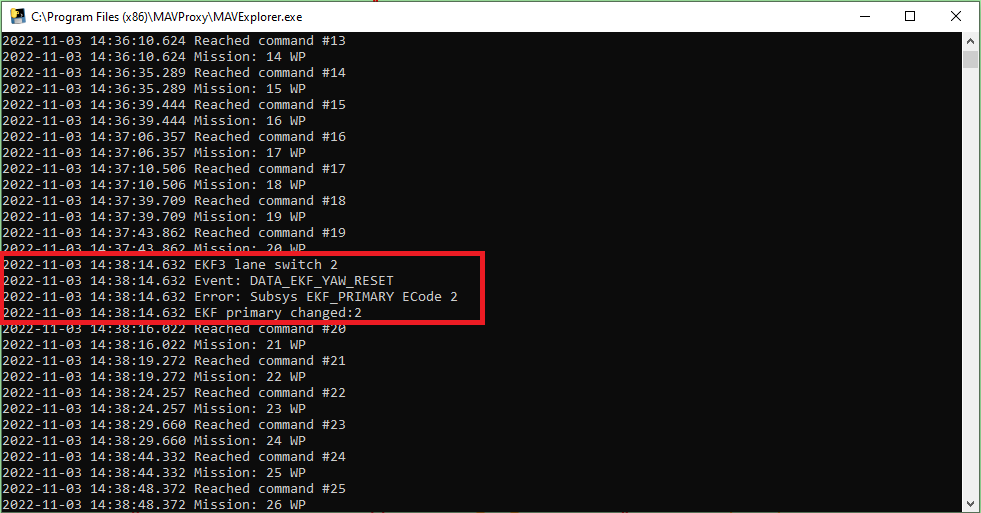
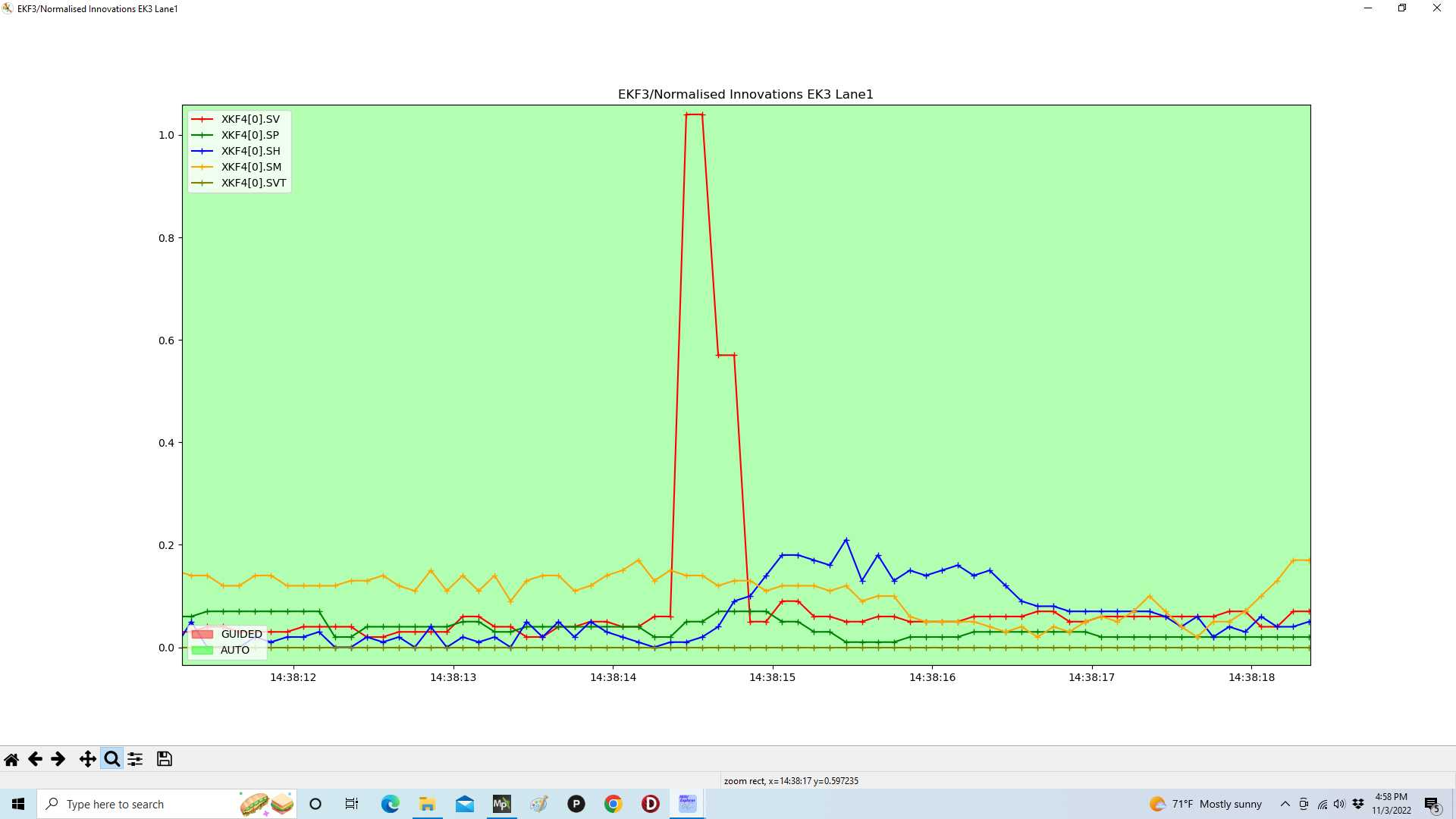
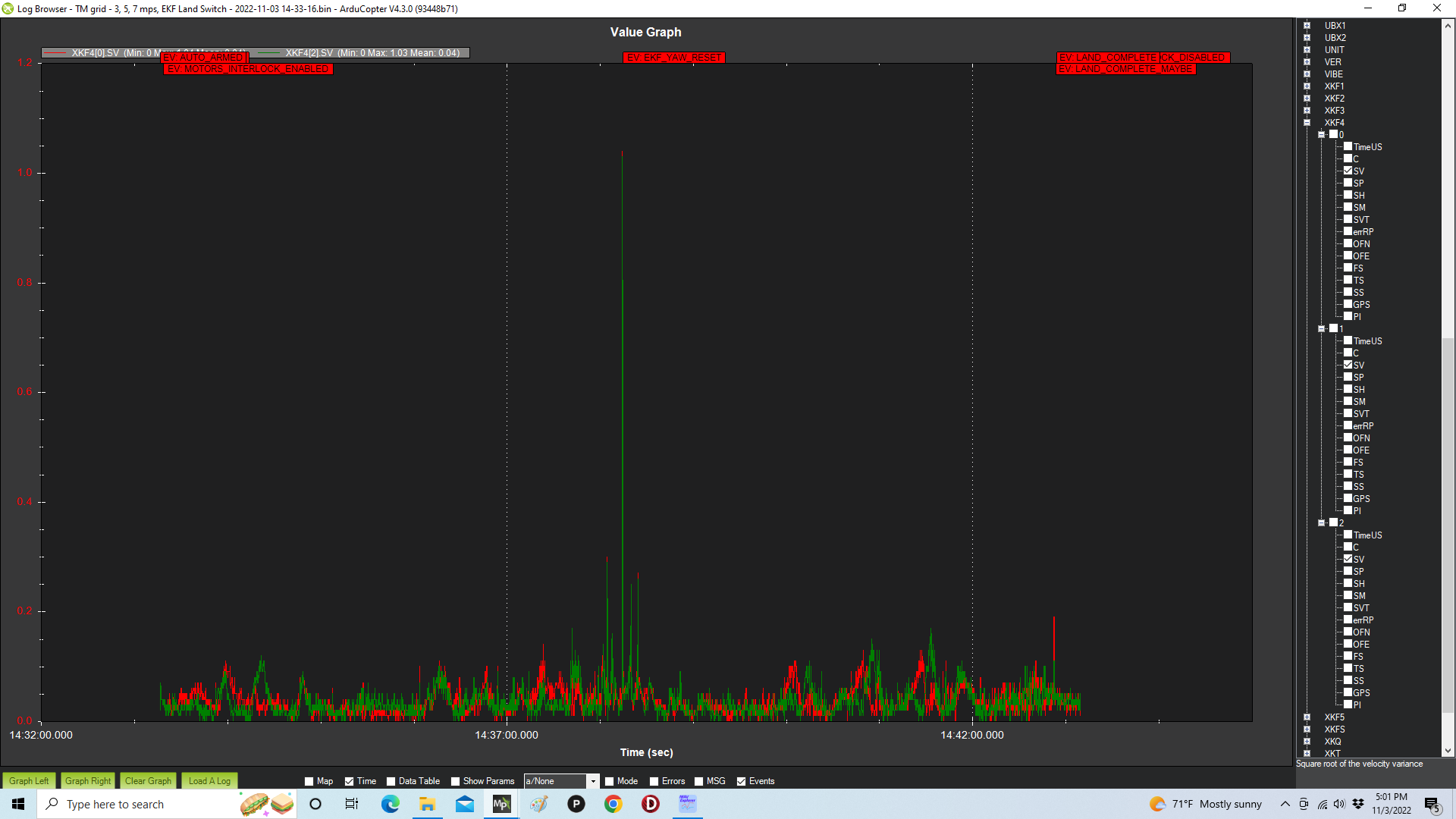
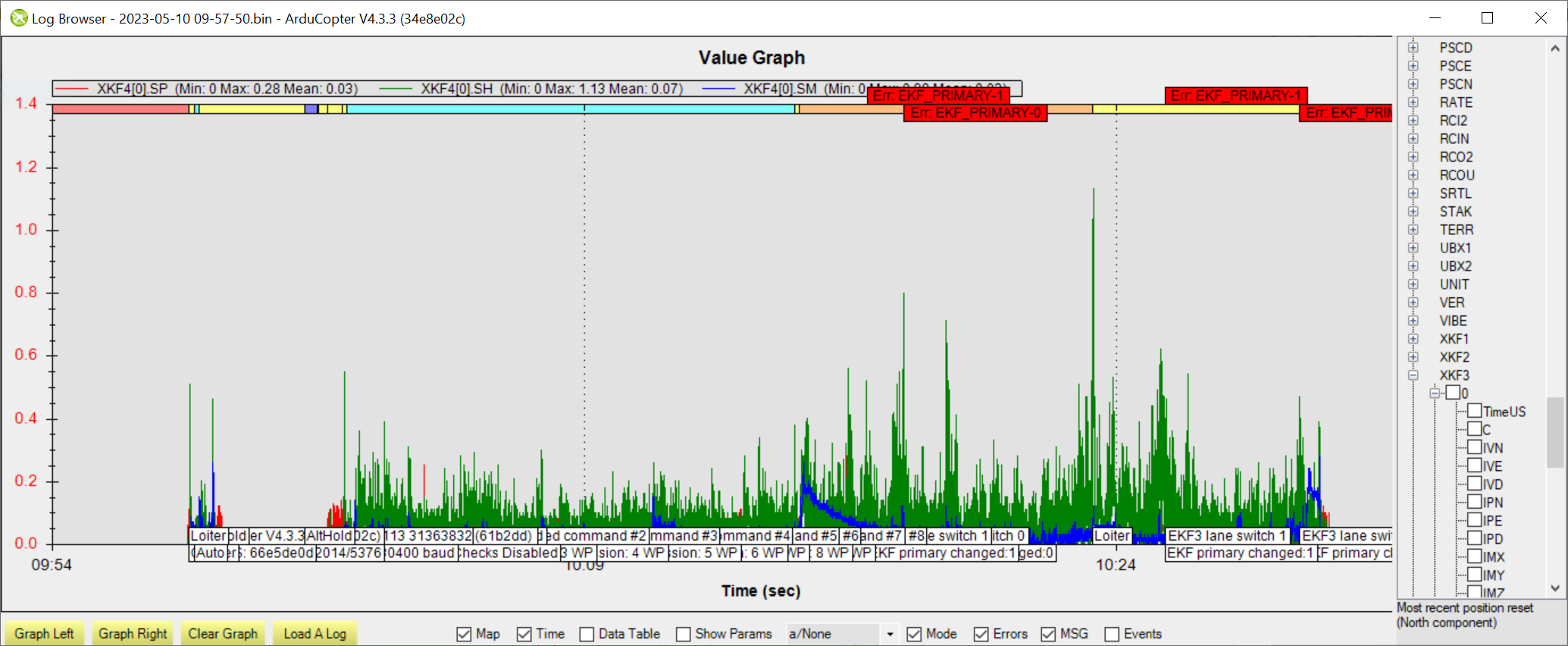
I first looked at MavExplorer EKF3/Normalised Innovations and found that there was a spike in XF4(x).SV at exactly the time of the lane switch: 14:38:14.632
Since all three EKF’s had the same spike in SV, does that mean that the lane switch accomplished nothing - the firmware simply tried a different lane to see if another lane was OK?
(If so - I suppose no lane switch was necessary - but probably good to do anyway.)
I’m trying to understand if any of this points to a likely hardware of software problem. Do innovations on all three EKF’s generally point to software or hardware issues?
If it’s hardware - I’ll try to fix it by repair or replacement. If it’s software, perhaps the DEVs would like to take a look at it.
I’d appreciate any advice or input on next steps I can take.
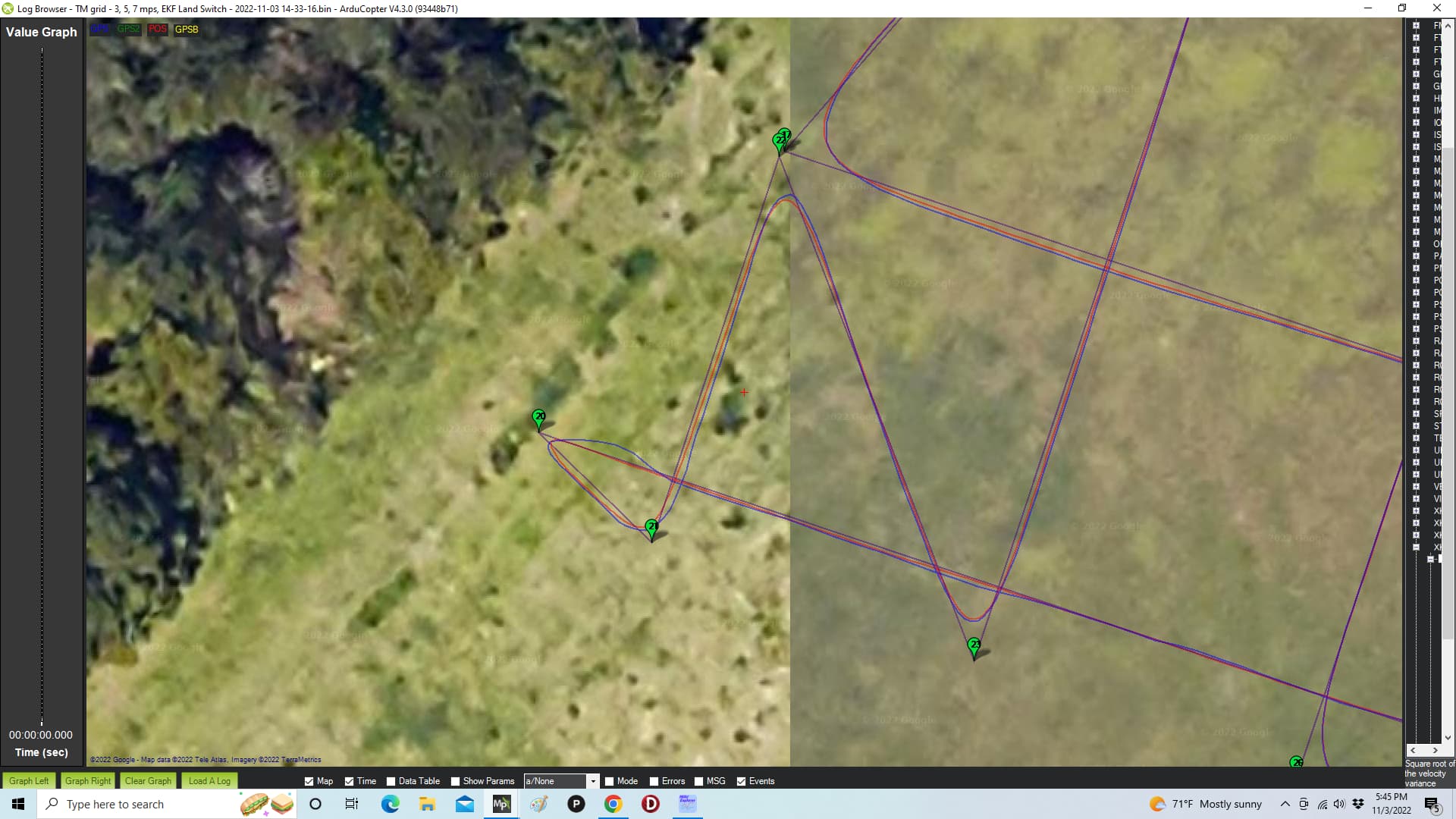
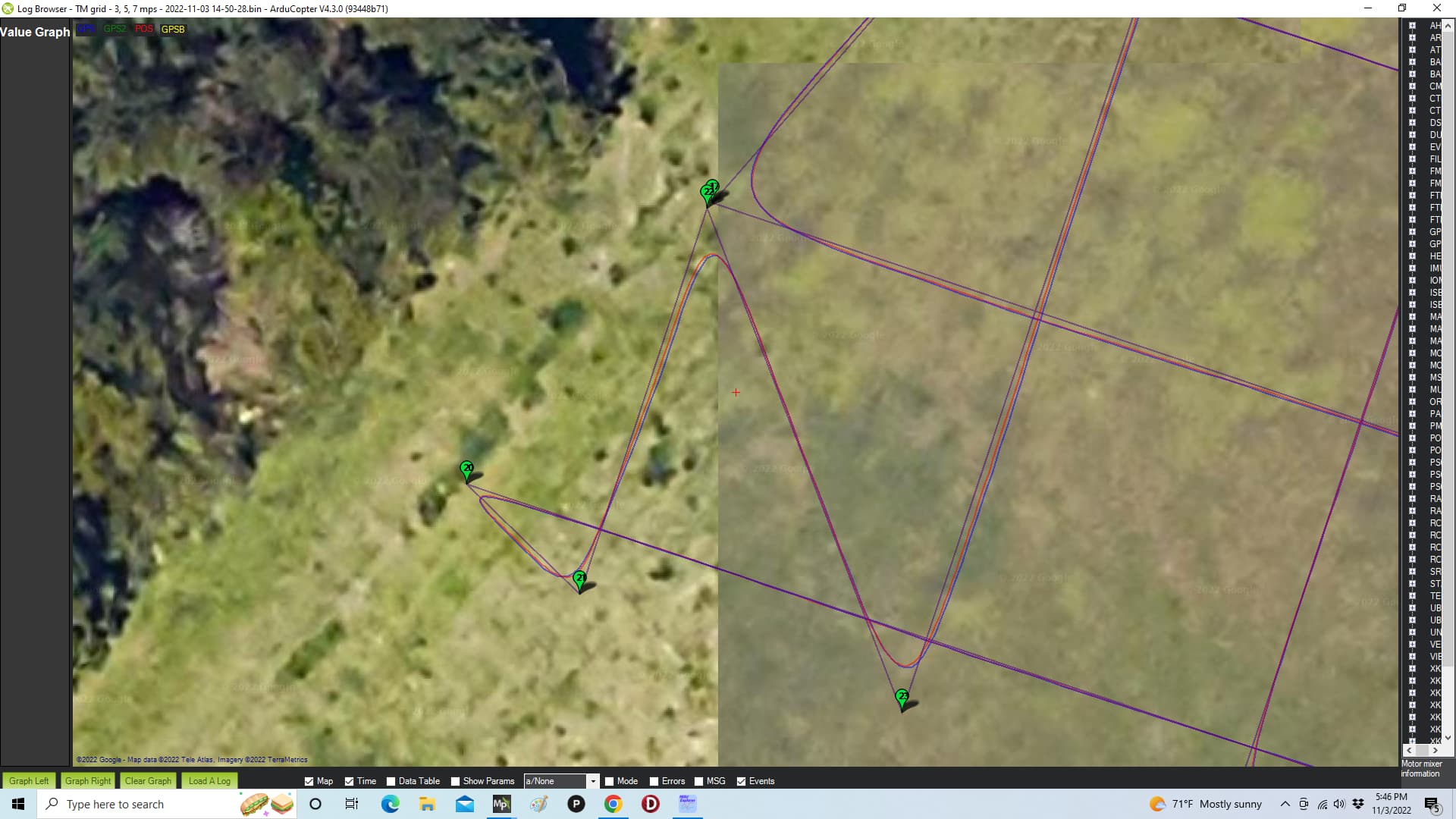
Those paths look very good apart from that glitch.
I couldnt see what caused it, though many others may be able to.
I ran magfit over that log and your compass settings are pretty close, you could adjust them to these if you want to be a bit more exact:
COMPASS_OFS_X -91
COMPASS_OFS_Y -67
COMPASS_OFS_Z -7
COMPASS_DIA_X 1.033
COMPASS_DIA_Y 1.014
COMPASS_DIA_Z 0.897
COMPASS_ODI_X -0.029
COMPASS_ODI_Y 0.072
COMPASS_ODI_Z -0.129
COMPASS_MOT_X -1.215
COMPASS_MOT_Y -0.061
COMPASS_MOT_Z -1.027
COMPASS_SCALE 1.00
I’ve had several lane switch occurrences in the past couple of years.
I’ve never been able to discover the root cause of any of them. I suspect some “glitch” was the cause for each occurrence.
It appears to me this is the idea behind the creation of EKF3 and the ability to lane switch. As a “glitch” may happen at any time - the ability to lane switch provides a safety net.
Where possible, I use a telemetry connection to Mission Planner as part of my ground control - and I bring up both the EKF and VIBE displays so I can monitor them for problems as the mission progresses.
My hope is this will allow me to tell the difference from a “glitch” and a “failure” resulting in a lane switch - by watching for steady rises in the displayed innovations.
To date - I’ve never observed such a steady rise in EKF3 innovations - so all of my lane switches appear to be “glitches.” But I investigate each one anyway.
If I ever observe a steady rise in either EKF or VIBE in the displays, I’d hope to abort the mission before a lane switch occurs.
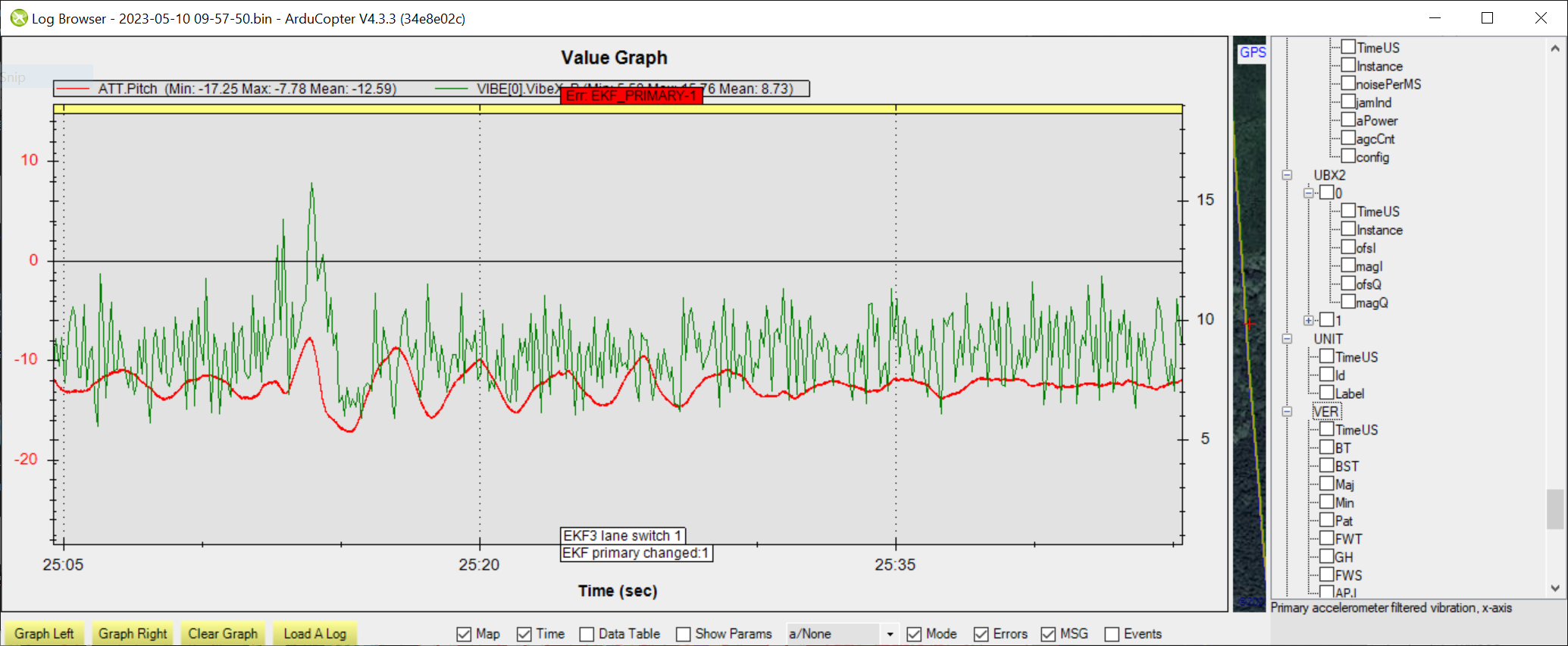
I cant easily see why there’s lane switches, but I suspect it’s related to vibrations (which are within limits but borderline) and tuning. There’s some attitude oscillations and a bit more noise in the motor outputs than desirable.
Update to latest stable firmware since there is important fixes for Cube Orange.
Before improvements I wouldnt be doing such long flights or Auto missions until you’ve finished sorting out the basics, like some extra attitude control tuning.
Also it looks like you’ve got 3 GPS units which is a bit pointless since only two are used.
Keep the best two, it looks like only one has a compass, so keep that one.
Check the compasses are all present and accounted for.
Start with these, some are only a tiny shift from what you had, but could help
ARMING_CHECK,1
FENCE_ENABLE,1 // check other fence settings
GPS_GNSS_MODE,65
GPS_GNSS_MODE2,65
INS_HNTCH_FREQ,33
INS_HNTCH_BW,16
INS_HNTCH_FM_RAT,0.7
INS_HNTCH_REF,0.14
LOG_BITMASK,145406 // cut back the logging a bit
MOT_THST_EXPO,0.4 // you had instability at low throttle, descents
Do a test flight in AltHold with plenty of yaw, circles and a figure-8 if you can. It only needs to be a short flight. Then we can run that log through magfit to really fix up the compass parameters.
PIDs look a bit odd, like D terms are too high. It would be good to do Autotune one axis at a time.
Yes, apart from some history of people using 0.4 successfully on other similar builds I’ve observed, you had some tell-tale signs in the log. Like instability as soon as you start to descend and the rule-of-thumb for setting and testing MOT_THST_EXPO is
set too high you can see instability at low throttle
set too low you can see instability at high throttle