Hello, everyone. I’m currently tunning a four-rotor drone. In the filtering process, I’m using online FFT filtering. The only aspects that trouble me regarding filtering are as follows:
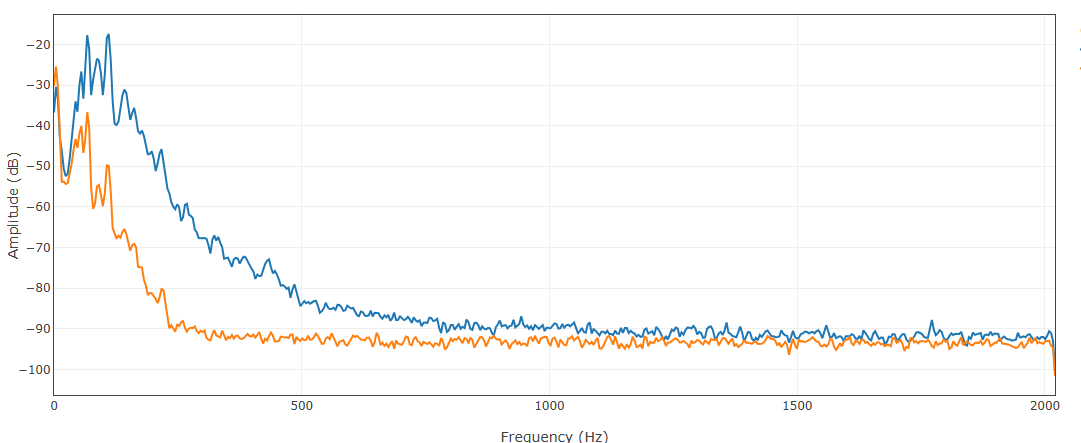
By using Ardupilot filter review tool
-
Judging from the curve, generally, at what negative value in decibels (dB) of attenuation can we consider that it doesn’t affect the system?
-
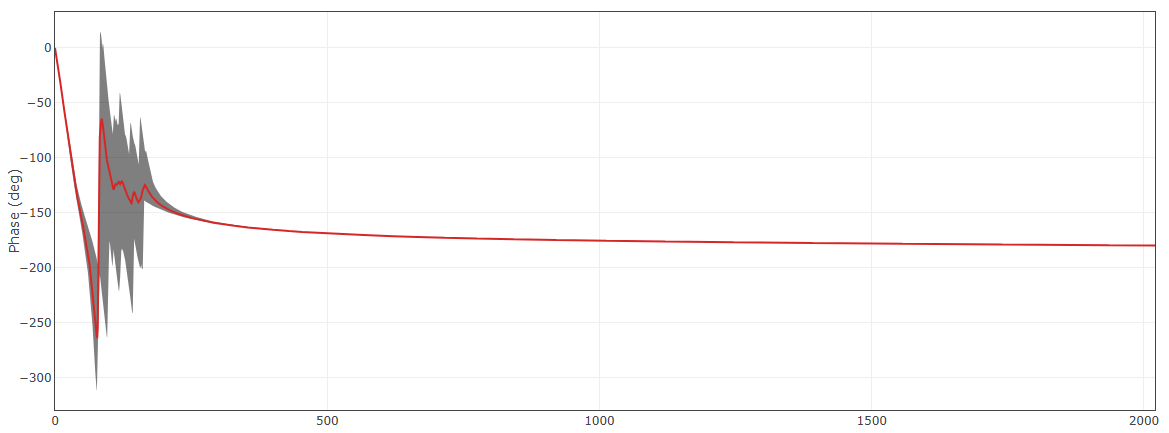
Adding a filter will inevitably cause a delay. So, looking at the phase curve in the Ardupilot web tool (filter review tool), what magnitude of phase delay can be regarded as reasonable?
I’ve read many articles in the Ardupilot wiki, but this threshold value has never been mentioned. I sincerely hope that someone who knows about this can offer me some help.
Thereby enabling the configuration of better filters while controlling the delay.
I’m uploading a LOG file which adopts online FFT filtering. I hope it can be used as an example to illustrate the setting of the entire filtering threshold.