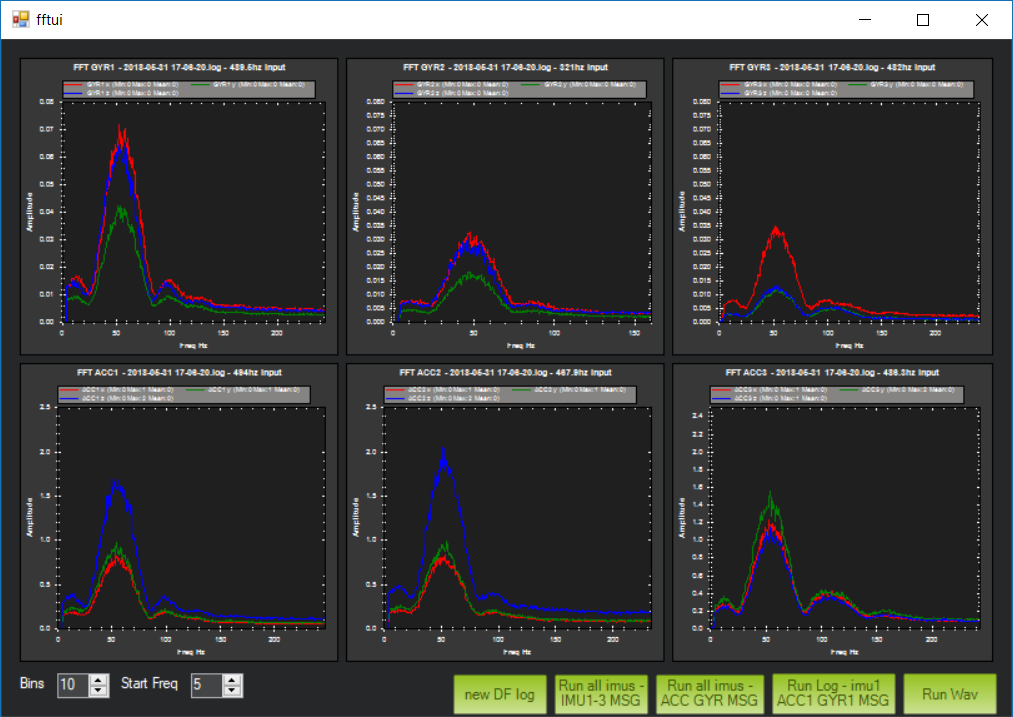
I have a Tarot X4 with Pixhawk 2 and U7 280 kV motors. I would like to know if someone could help me interpreting the logs, since I don’t know what to infer from the FFT tool and how to proceed.
The first one is the PX2 on antivibration standoffs (Log: 2018-05-31 16-44-15)
Either way, my vibration levels are still not acceptable when the copter flies on medium winds (4 m/s). I’m not sure how to proceed. The logs are attached below.
Most likely your propellers are running on those frequencies? For me the only way was to make the chassis stiffer. But that is most likely not possible with Tarot X4.
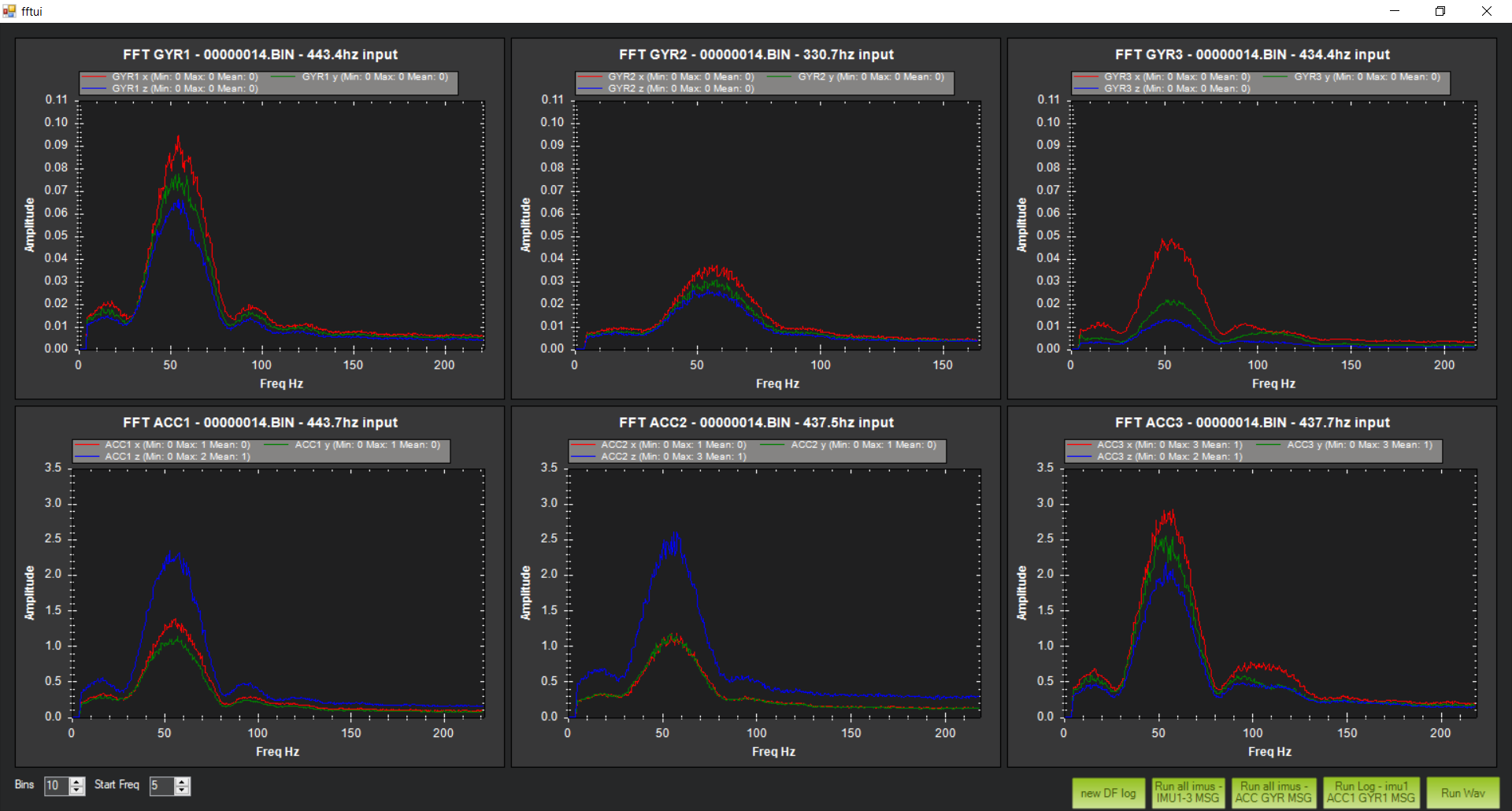
I got that 55Hz resonance fixed and now I have to battle with 110hz resonance but at least vibrations are now within limits.
Thanks for that post! I’m still not sure how to proceed, tough.
From what I understood, vibrations around 55 Hz are normal in the Pixhawk 2. However, the amount of vibration is much higher in my quad than what is shown there (0.25 in amplitude in the post, but I have vibrations of more than 1.5). So, how can I lower this values?
In any case, I’ll try with lower propellers to find out if anything changes (I normally use 20x6 props, I’ll try with 18x6.1). My only concern is that my motors are around 1650 PWM with those propellers and by lowering them I may not have enough room for high winds since my motors may saturate.
Additionally, I have new flight logs, one is an Autotune and the other is a series of manual flights followed by an Auto mission. The vibration levels are almost the same.
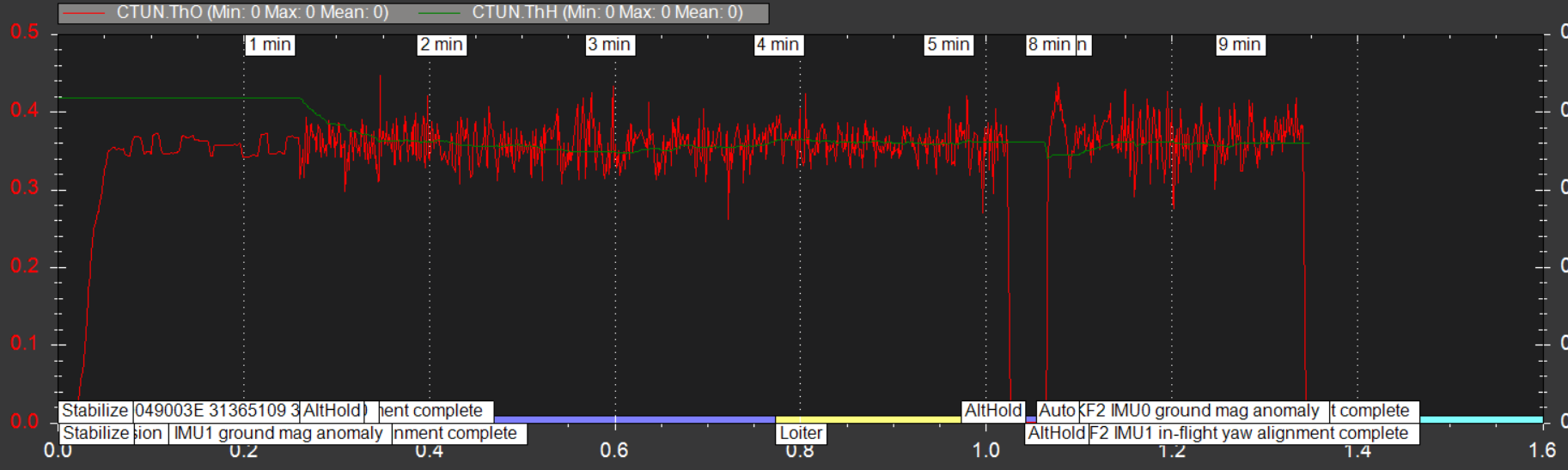
Moreover, the ThO moves a lot, and it doesn’t keep altitude in Alt. Hold (in Auto it seems fine, tough). I’m not sure if both behaviors are related to vibrations.
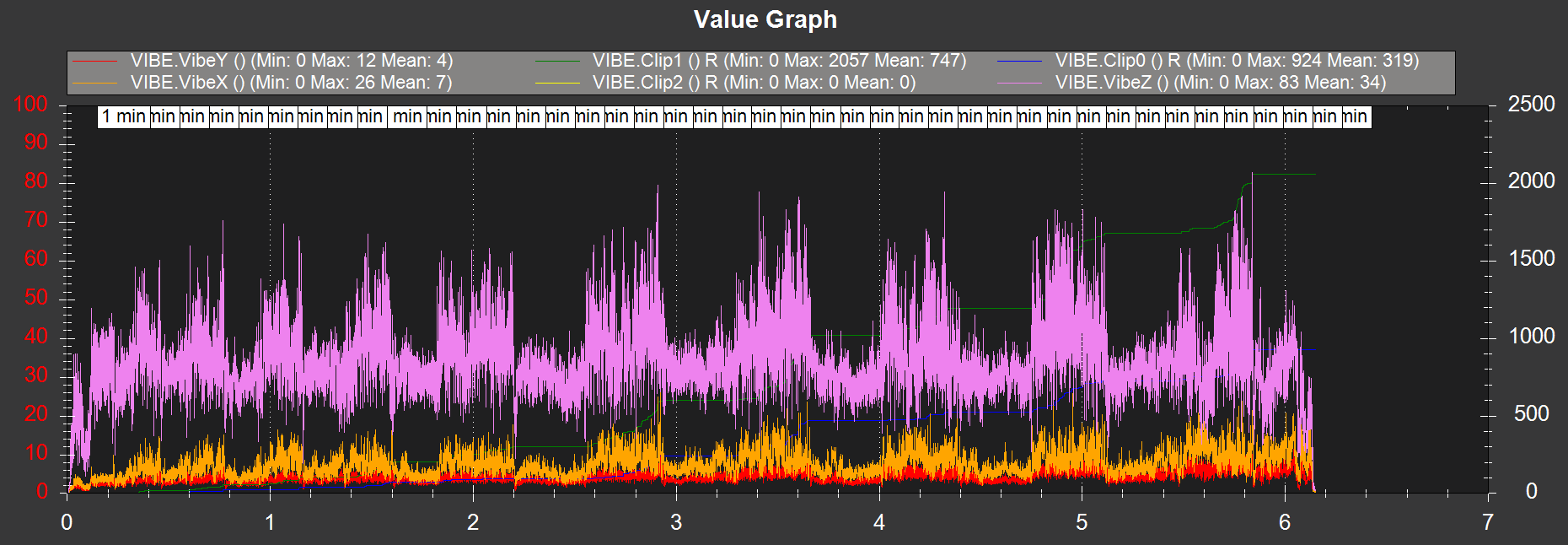
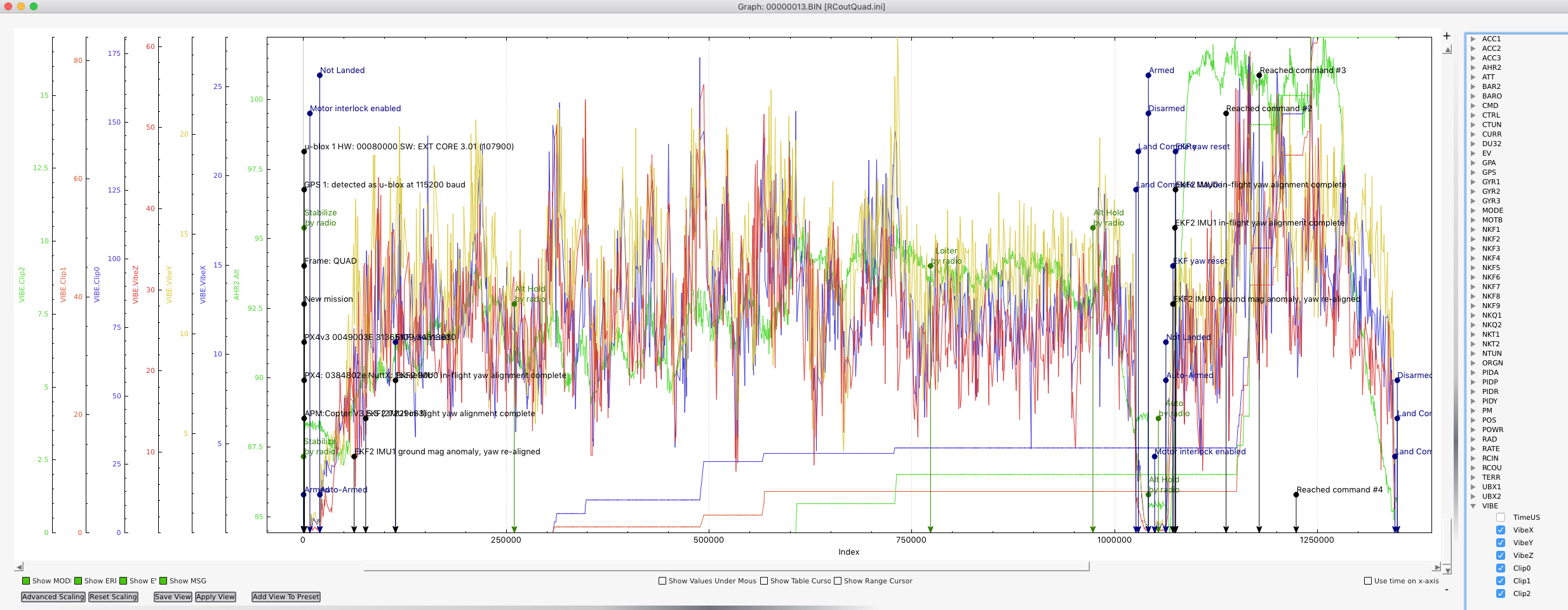
Your not logging IMU data but the Vibes indicate vibration is probably the key problem.
Where you experienced problems quite a bit of clipping was happening.
So I would suggest looking at your vibrations first and trying to reduce them.
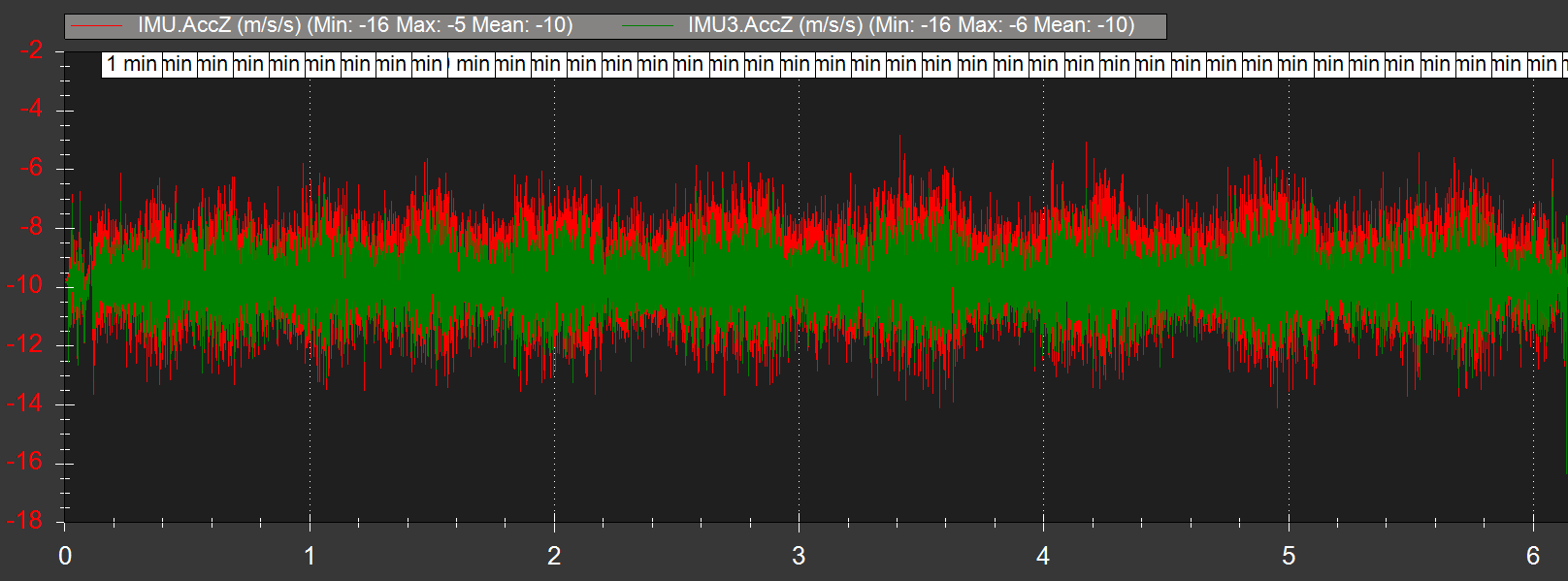
It means your vibrations in the Z axis are super horrible!
First…
Your Hard mount Cube is quite clearly behaving much better hard mounted than soft mounted.
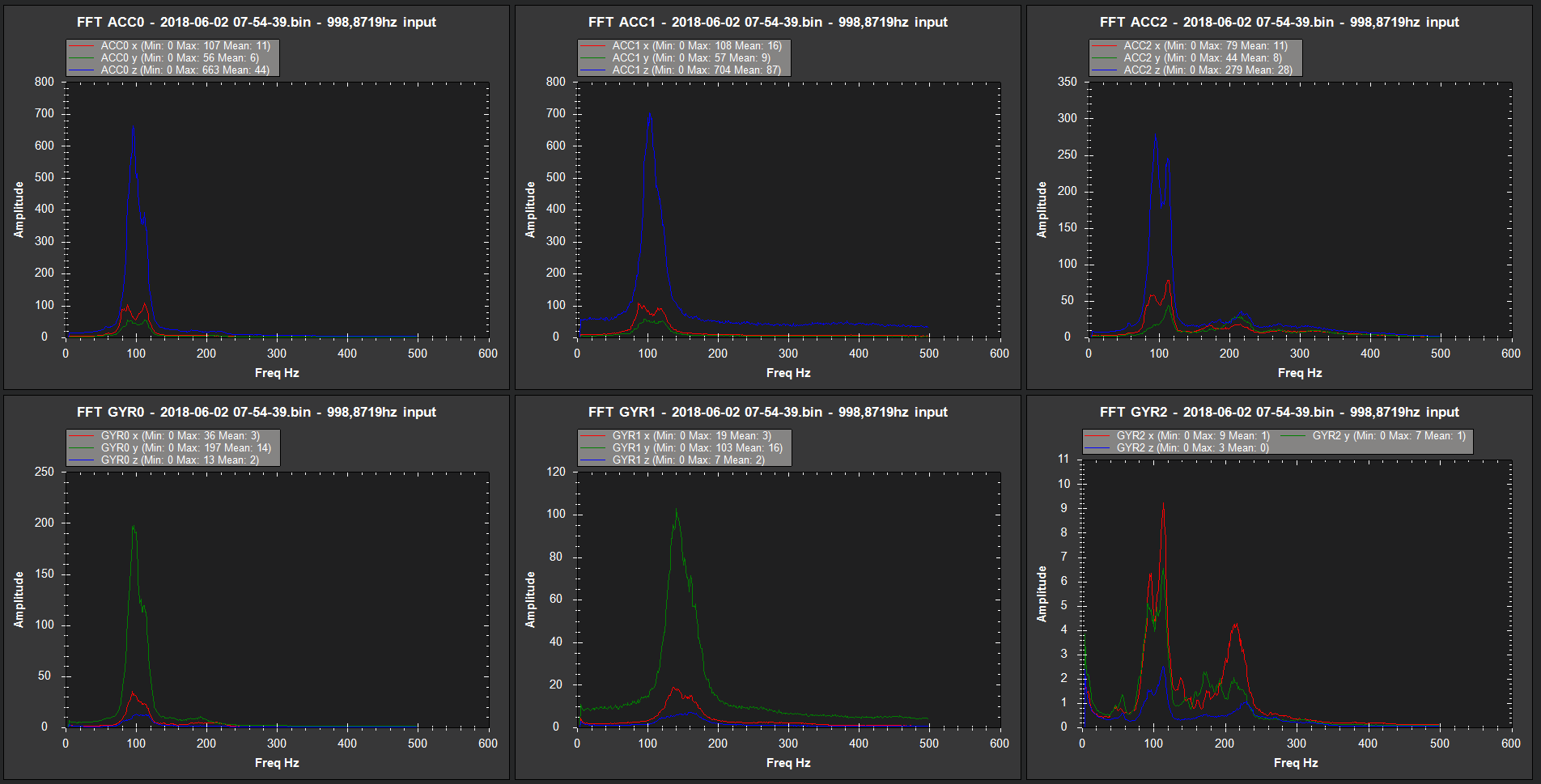
As mentioned, your blade passage frequency is sitting around 60Hz, this is bad for multiple reasons, the main reason is it’s close to the harmonic of the isolation system. (Clearly also of the additional system you added)
So in your case, if you don’t change anything else on your frame, you may need to damp the 60Hz with a well designed 60Hz damping Mount
I suspect you are using a very bad isolation mount. A correct one for your frame should be very wide, it should have as much mass as possible on it, and the linkage should be very very soft.
Have you had in mind to design Cubes with different damping materials to change that harmonic frequency?
This damping seems to be a problem with bigger drones in Z direction (blade passage frequency 60/120Hz (aprox.1500 or 3000rpm). This 60/120hz vibration is extremely hard to dampen and that harmonic frequency of Cube doesn’t help .
I was too having problems with ~60Hz vibration in Z direction, but I was able to dampen that frequency by changing the drones structural stiffness/etc. I’m currently seeing very low vibrations on the non-dampened IMU and very high vibrations in 110hz (multiply of ~60). However that non-dampened IMU is not temperature controlled and etc, so its not that smart to use it as a primary IMU.
Do you have any suggestions?
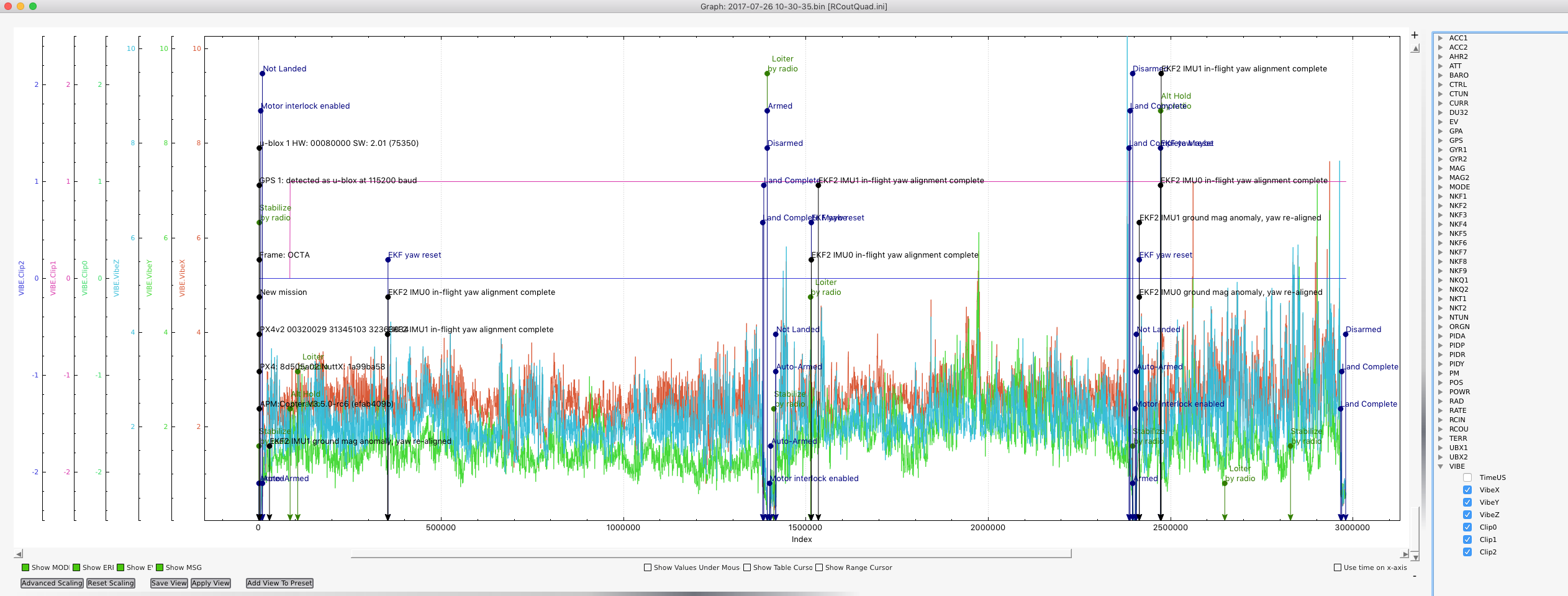
These are not event the worst what I have seen , but normally this Z axis Vibe is in 20-30 area.
These images are taken from a flight with 8m/s speed and there was wind one direction. You can easily see when the drone was going in same direction as wind as the motors were doing less work and happened to rotate in ~60Hz/120Hz(two blades)(3000rpm).
Here’s new data, this time using 18x6.1 propellers. I can see that vibrations are higher, so this doesn’t solve my problem. Next week I’ll try changing the payload and I’ll try to get a 60 Hz damping mount.
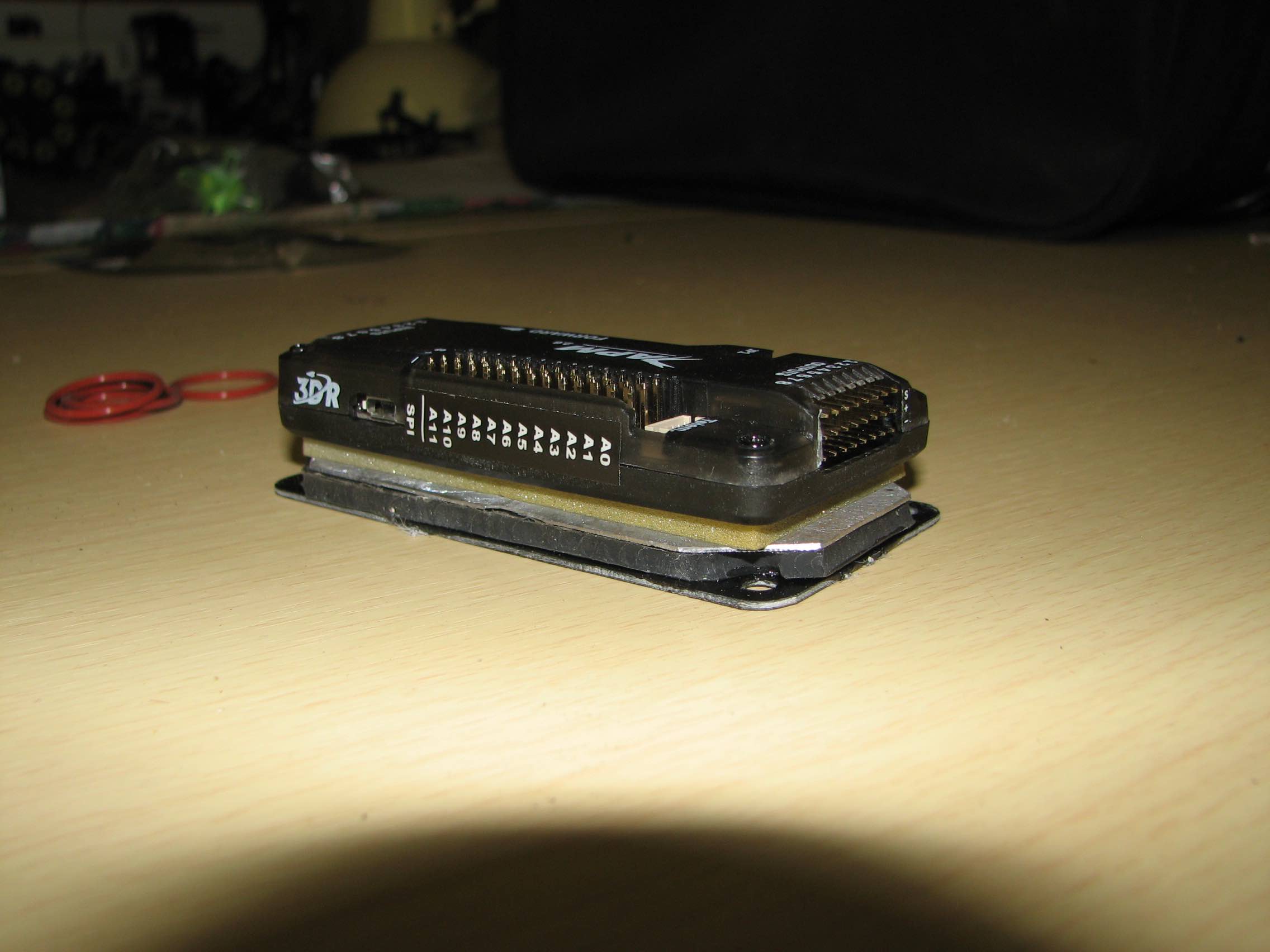
I’ve looked for more information on how to design a 60 Hz damping mount (or buy an existing one), with no luck so far! In this document, it says that I should increase the system mass and reduce the stifness of the antivibration mount. I think this is the same that you mention, but how should I do it? I guess I could add weight somehow to my Pixhawk 2, but what about the linkage?
I’m kind of confused because you said the Omnimac 3D printed mount is incompatible with the Cube. Is it because of its dimensions or is the whole design useless? After reading the previous document, I would think that I need to make something similar, but with more mass (maybe larger and with greater thickness) and maybe use softer rubbers (I’m not sure if there are softer rubbers than the ones in the picture).
In any case, there is a guide in Ardupilot that mentions several methods and damping mounts that can be used. Is any of those somehow useful for the Cube (maybe with some minor modifications)? Thanks a lot for all your help.
I have had such good success with the 'O’ring suspension for years now, that I consider no other method, especially for the larger copters.
The advantage is that the stiffness can be altered by the use of larger or smaller 'O’rings.
But I would strongly recommend the silicone type 'O’rings instead of the ‘normal’ type.
Doubling up on the 'O’rings is another addition I use, especially on the larger commercial stuff.
The added mass to the suspended platform is the other part of the equation.
Typically I find a 1mm lead sheet cut to size id sufficient, and I have found using different vibration dampening layers above and below to assist in fine tuning to reduce nearly all frequencies.
Hi there,
I have pretty much the same issue with the PH2 with a tarot frame and 15x5 props. I tried gel cubes for vibration damping and tried the FFT analysis. I think it might have reduced the resonance but I am not sure.
The thread is located here: PH2 direct mounted vibration clipping issue/question


 .
. , but normally this Z axis Vibe is in 20-30 area.
, but normally this Z axis Vibe is in 20-30 area.