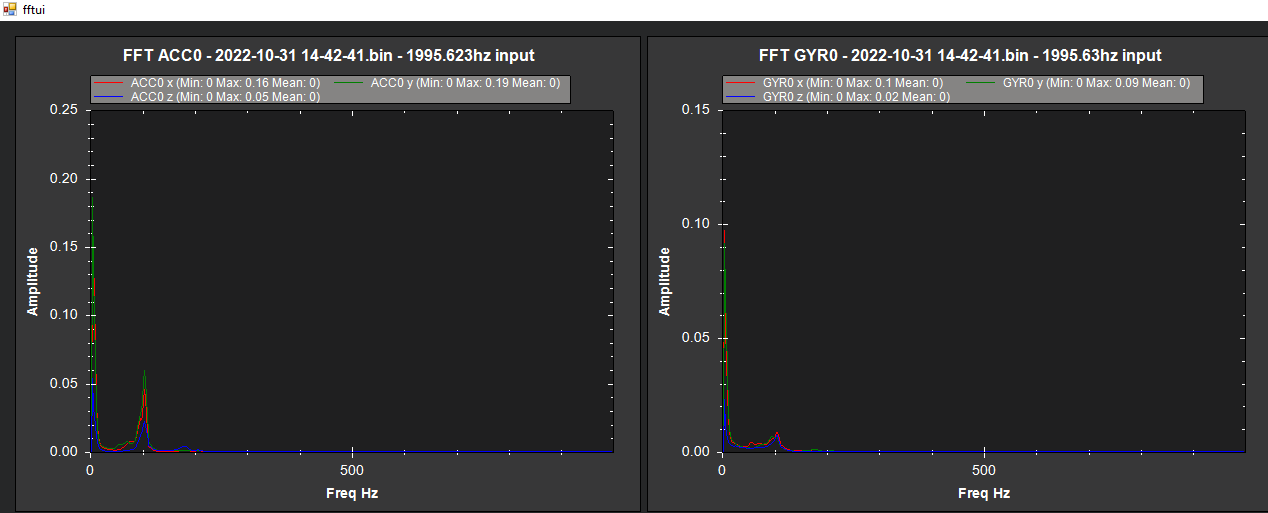
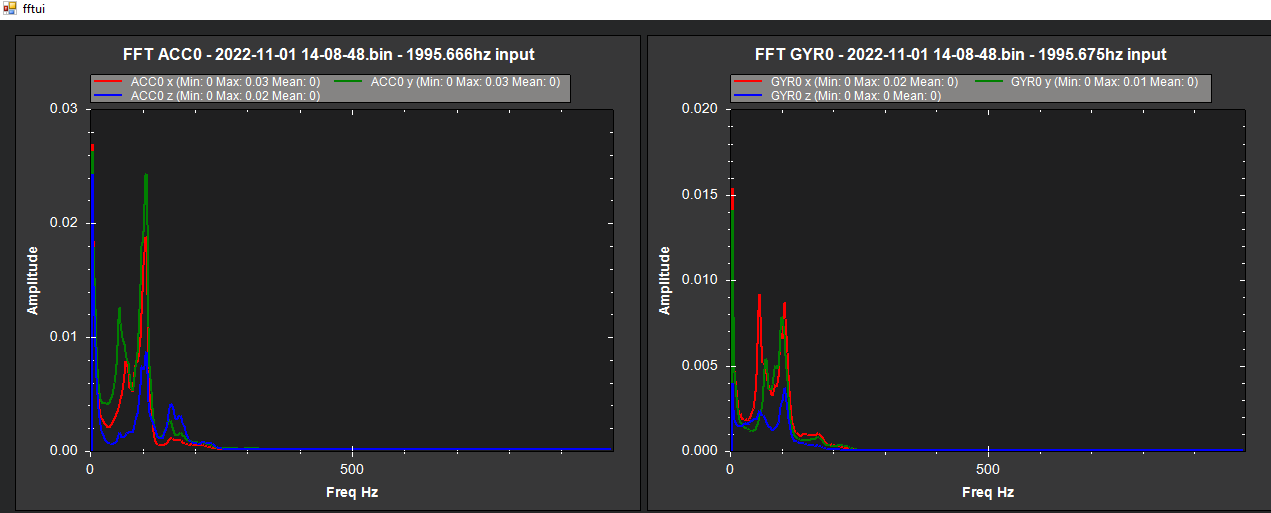
Rescale both Gyro graphs to the same full scale (drag a window) and then compare them. It’s auto scaling to the rigid body mode at the low end which has little value. Drag the Y-axis scale to .01 on both.
The ACC0 plots show a whole order of magnitude lower amplitude of vibration. As such - I couldn’t put make their Y-axis scales the same.
I normalized the Y-axis scales for the GYRO plots.
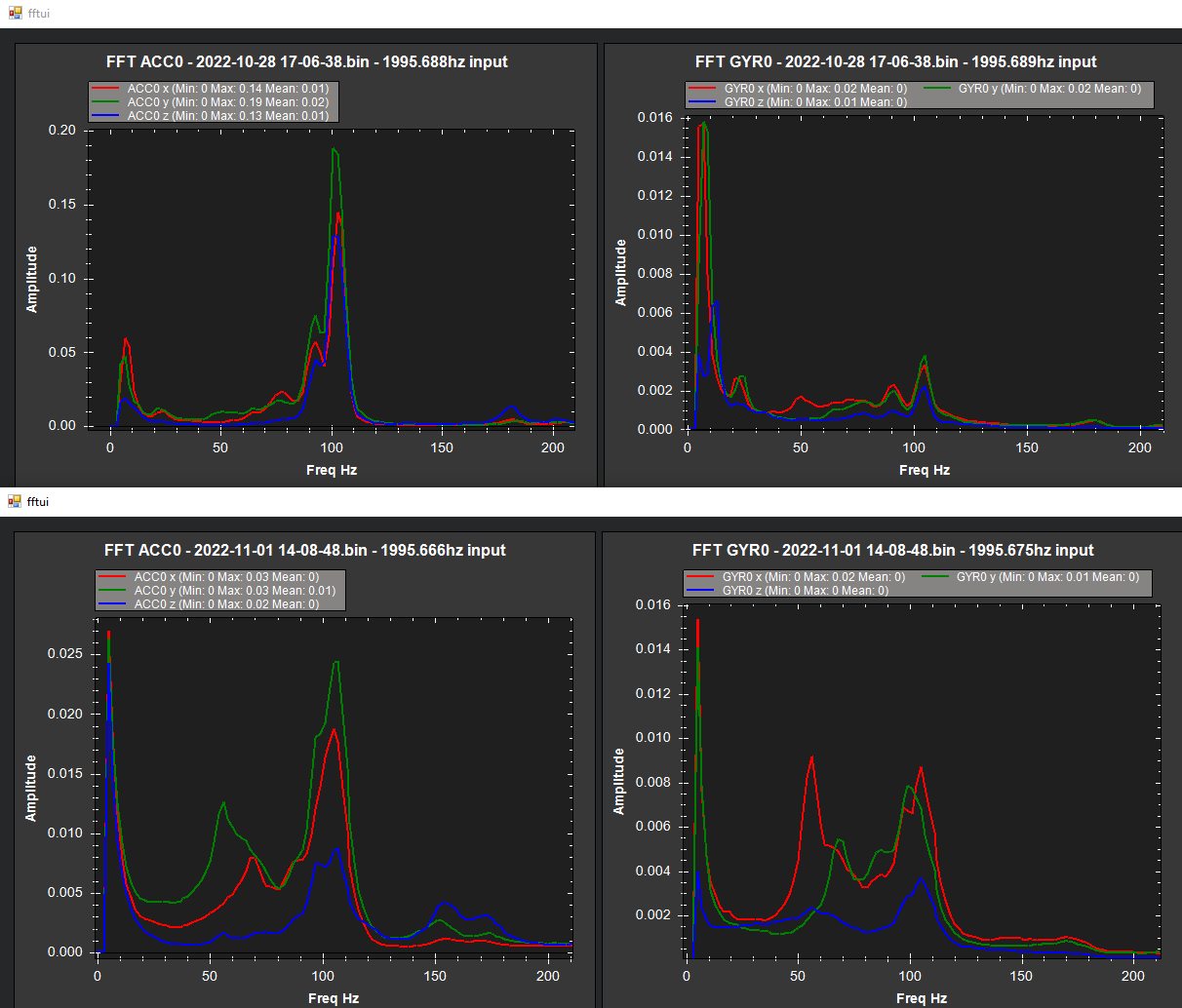
The results are interesting - and something I didn’t notice at first.
While FFT does a wonderful job of filtering vibration detection, version 4.3 of copter (bottom graph) appears to let through more vibration than version 4.2 - and has two peaks.
I’m wondering if this is just because Copter 4.3’s FFT improvements simply reports more accurately.
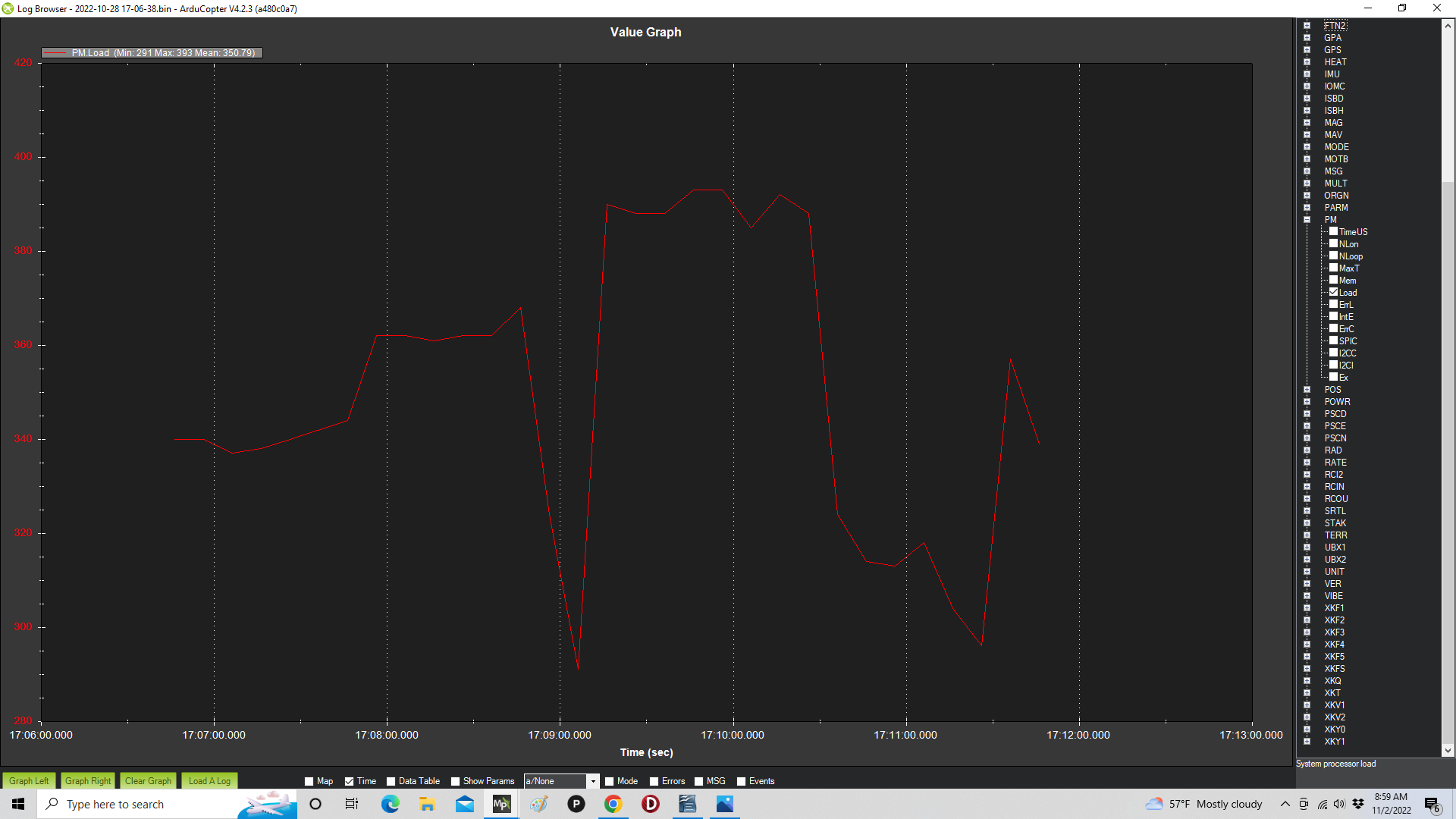
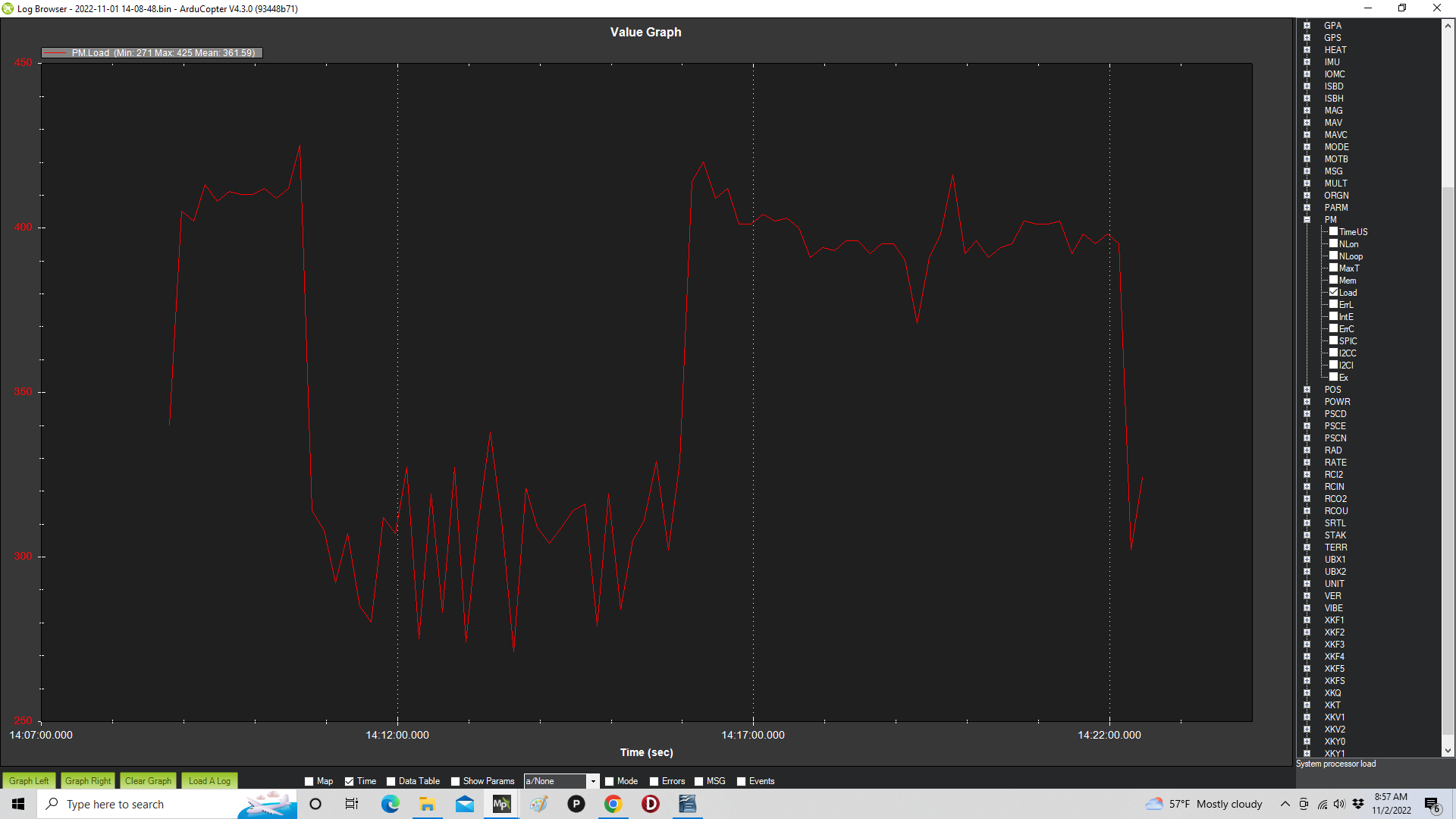
I also thought it might be interesting to compare the processor load between Copter 4.2 and 4.3 - which of course entails a lot more than just the changes to FFT: