what is my wrong, I downloaded QGC4.0, the Fence button is still disabled.
In MP, fence_enable is 1, serial0_protocol is 2 (MavLink2)
I don’t think this is the same issue as we are seeing with Plane.
I’ve recreated the issue using a USB cable connection with stable Rover and assuming it’s the same as what @lumono is seeing, this is the ongoing problem of QGC not allowing uploading of fences until MP is connected once. I’m not saying it’s necessarily QGC’s fault, it might be some issue with the capabilities being sent from AP Rover but I’m really not sure what’s going on.
EDIT: but now I can no longer reproduce the issue that I could reproduce 5min ago. The Fence options appears when I connect with QGC now.
@rmackay9 how you did the fence enabled. Would you tell me the step.
I tried many times, and reboot rover, it still doesn’t work,
Thanks,
BTW, when MissionPlan is available to design the fence.
All I had to do to make QGC work was to connect once with MP. Then the next time I connected with QGC the fence option was enabled.
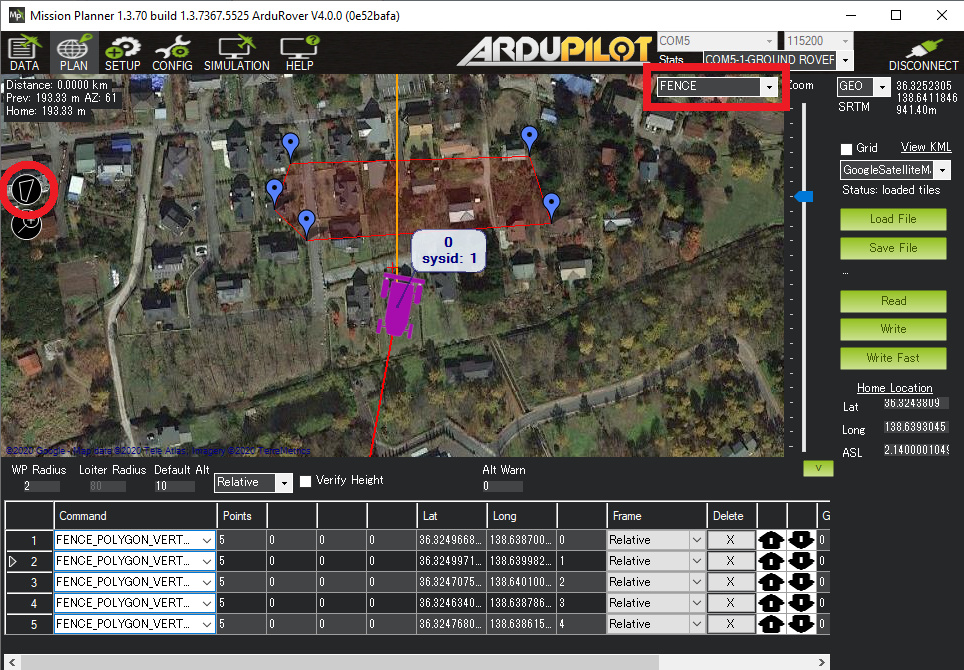
Beta MP can now upload complex fences. It is not nearly as elegant as how it’s done in QGC but in any case the way it works is:
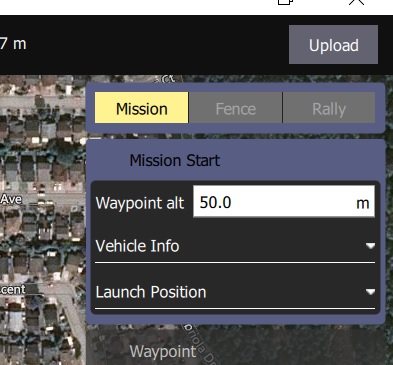
- open the PLAN screen
- select “Fence” from the top right of the map
- click on the Polygon icon and select “Draw a Polygon”
- click on the map to draw the polygon
- click on the Polygon icon again and select “Fence Exclusion” or “Fence Inclusion”. The points should appear where the mission items normally appear
- press “Write” to upload the fence to the vehicle
@lumono With QGC try turning on your rover (assuming you talking over radios) first. And then boot QGC.
@rmackay9 The issue with AUTOPILOT_VERSION response not being sent with capabilties happens with ArduCopter as well.
@rmackay9 If you turn on mavlink inspector you will most likely see that AUTOPILOT_VERSION is never sent to QGC even thought the request for it is acked. Which in turn means QGC doesn’t know the capabilties, which then turns off fence and rally. You can see the QGC details here: ArduPilot: Not sending AUTOPILOT_VERSION in reponse to request · Issue #8440 · mavlink/qgroundcontrol · GitHub
OK, thanks for the clarification. As mentioned on gitter, I’ve added it to our Copter-4.0 issues list (even though it’s reported here in the Rover forums) so we should be able to get to the bottom of it.
I tried start rover first, same problem. I never see fence enabled.
@lumono What OS are you running QGC on? I’ll post a link here for a hopefully fixed build for you to try.
@luomo Can you try with one of these newer builds and report back:
- Windows - https://qgroundcontrol.s3-us-west-2.amazonaws.com/builds/Stable_V4.0/QGroundControl-installer.exe
- OSX - https://qgroundcontrol.s3-us-west-2.amazonaws.com/builds/Stable_V4.0/QGroundControl.dmg
- Linux - https://qgroundcontrol.s3-us-west-2.amazonaws.com/builds/Stable_V4.0/QGroundControl.AppImage
- Android - https://qgroundcontrol.s3-us-west-2.amazonaws.com/builds/Stable_V4.0/QGroundControl32.apk
Windows 10, will try it.
Thank you so much!
- turn on rover, then load QGC that is downloaded from your provided site.
- open MP, connect the rover, close the MP, load QGC again
both cases do not work, the fence button is still disabled.
@rmackay9 I follow your step to draw a fence on MP, when I write it to rover, I got the error.
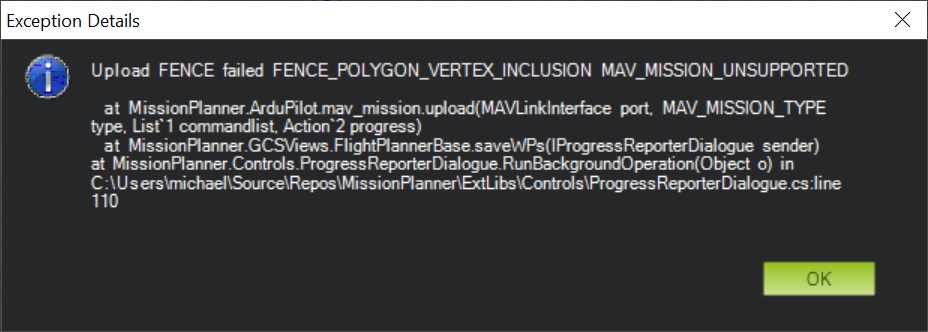
I used official MP. not Beta
@lumono Can you turn on VehicleLog logging? Instructions here: https://docs.qgroundcontrol.com/en/SettingsView/console_logging.html. Then connect the vehicle to QGC and let the parameters finish download. Save the console log to a file and link to it here.
I am not sure this is you need. If you need more detail log information, let me know.
Thank you so much.
@lumono That log doesn’t have VehicleLog turned on. Go to Settings/Console. Clear all and then select VehicleLog and then connect your vehicle.
QGClog2020Mar07VehicleLog.txt (7.0 KB)
I confirmed in MP, the FENCE_ENABLE 1 0:Disabled 1:Enabled
SERIAL0_PROTOCOL 2 1:MAVlink1 2:MAVLink2