Hi, everyone.
I am studying fence avoidance with ArduCopter SITL.
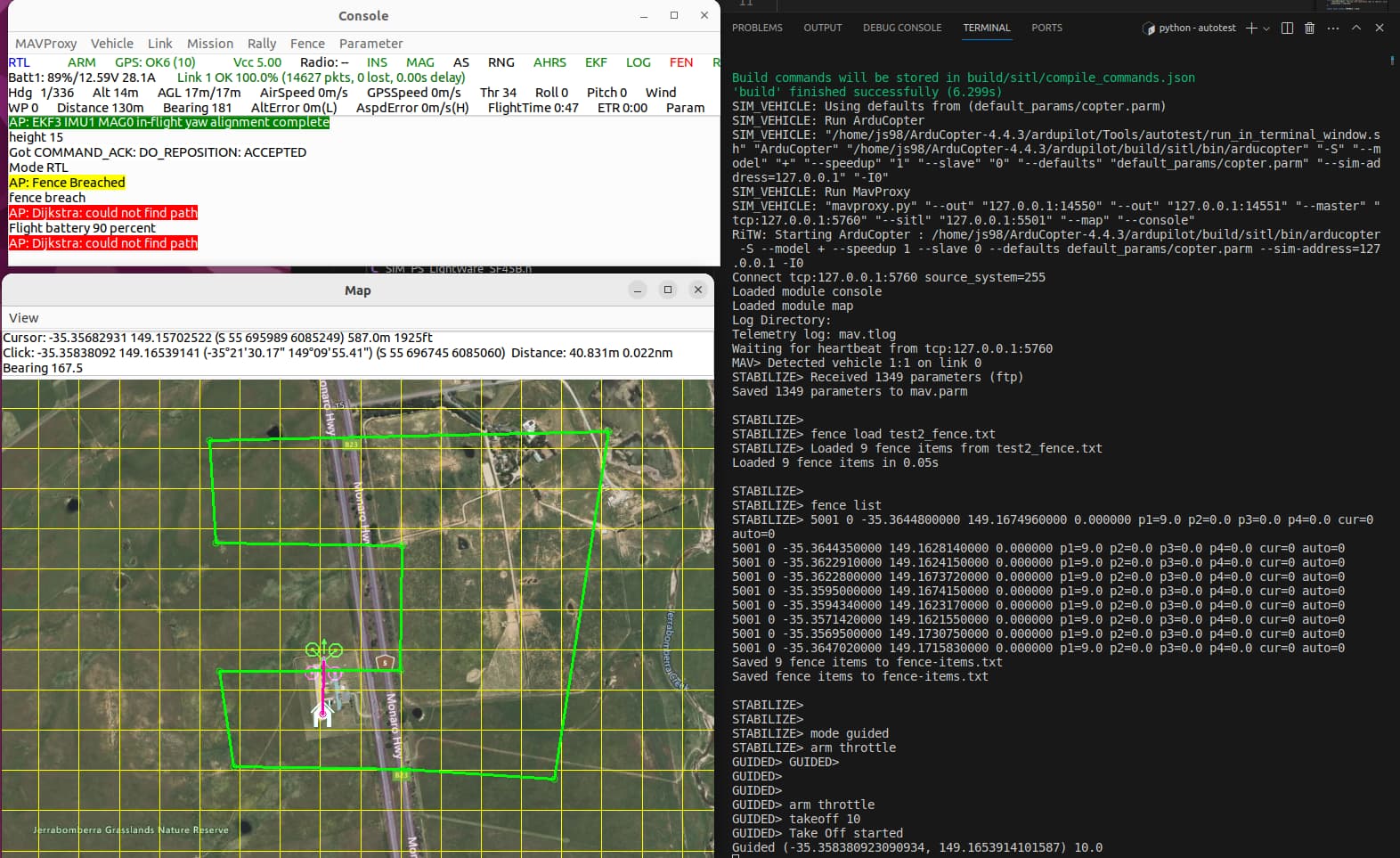
However, the fence avoidance with Dijkstra fails to find the path.
Below are the captured screen and the param values for the test.
param set AVOID_ENABLE 7
param set FENCE_ENABLE 1
param set FENCE_RADIUS 10000
param set OA_TYPE 2
param set OA_MARGIN_MAX 10
param set AVOID_BEHAVE 0
param set AVOID_MARGIN 2.00
My guess as to the cause of the error is as follows.
- You set the fence or param incorrectly.
- I didn’t set up a mission separately and took off the drone in guided mode and only gave the “Fly to” command.
Does anyone know how to fix this? I would appreciate it if you could let me know!