I came across a critical issue while groundtesting in FBWA mode.
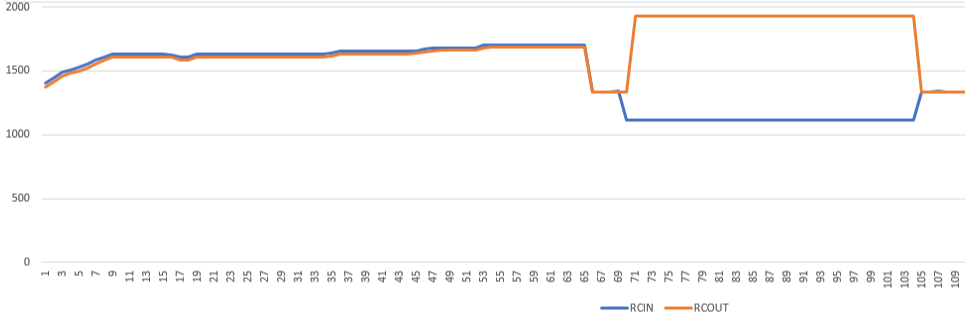
The throttle input and output values are perfectly aligned as long as the throttle input is positive. However, when reversing, full throttle is applied instead of the correct reverse thrust value.
As far as I know, the USE_REV_THRUST parameter only affects the reverse thrust behavior in flight modes where throttle is auto controlled. However, throttle in FBWA mode, unlike FBWB, is manually controlled.
The params below are all my RC3 and Servo3 settings:
In fbwa and with opentx rc, I could play with reverse thrust if I set my RC Param in opentx to -100 100. If I set 0 100 I have just forward throttle. I read on github that is the expected behaviour.
Rc3_min and servo3_min should be +/- same value IMO.
I am flying a Skywalker X8 with retracts.
Auto takeoff went smooth but unfortunately it didn’t follow the waypoint mission the way it should. When I regained manual control it was too late. I will switch to a Bixler now to perform all the tests with pixhawk and once I get everything working correctly I will repair my Skywalker and of course share a video of the reverse thrust landing!
Sad, may be your elevons was wrong. With 3.8 and elevons you have to set it to AETR in remote now. Before this firmware, I had another setup with mixes which are not working with 3.8 fw.
Hi Lucas,
In Blheli suite, what is your PPM min value, PPM mid, PPM max ?
Also the key but not related here is to set motor timming to low in blheli suite.
It works in both Manual and FBWA , but I wonder how to manage it, I mean I did not use any switch on the Taranis to activate reverse as some user did.
I was thinking about activate the spring of the Throttle in the Taranis .
Actually I had to lower the throttle to Arm with Arduplane the go to middle 1500 to arm the BlHeli Esc.
I manage it only in auto mode.
To avoid unwanted reverse throttle in fbwa, I just remove Low to mid in thr with this screen :
I don’t have taranis, but this scren looks like the same. This screen could have others names like output, servos, limits depending on firmware version I guess.
What you have to do is to set you throttle channel to :
CH3 Thr 0.0 0.0 100
With this setup you could arm in lower value.
Instead of that
CH3 Thr 0.0 100.0 100
If you have to arm, you could only in middle position
If you want to control it in fbwa mode, keep value -100.0
Setting Rc3 trim to 1500 , set 1500 as pwm output for throttle even if in disarm state , so If the stick is in middle position I can arm and the go for clockwise rotation when going up with the stick and in the opposite direction for motor when lowering the throttle stick.
Setting Rc3_TRIM to Rc3_MIN set 1000 as pwm output for throttle even if in disarm state.
In fact with radio calibration use that set for RC3_MIN value.
I did a test flight but it is difficult to control the throttle that way for me so I will use a switch on my Taranis for the reverse action.