I used a Mavlink command over telemetry to command my drone to takeoff. During takeoff I accidentally switched from Loiter mode to Position Hold mode using my transmitter (I touched a switch by mistake). The throttle was at minimum and the drone was about 3m up by my own judgement. Immediately the drone plummeted to the ground in a seemingly uncontrolled manner (it was tilted heavily to one side). The descent rate seemed much faster than normal Position Hold descent.
Does anyone have any ideas what happened? I looked at the log myself and it doesn’t show the change to Position Hold which I find strange…
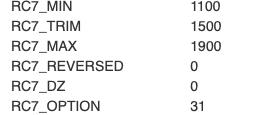
Hello! Taking a quick look to your log, I can see that there are some problems, but first of all, you were always on loiter, so you didn’t change to posHold:
It seems that you tried to perform three flights, in the first two the motors were at maximum trying to take off but the current altitude didn’t change, so that indicates that there is a problem with inverted propeller (or directly none) or you have an overweight/underpower drone.
I have tuned each axis separately using autotune but I have not modified any of the tuning values manually. Do you recommend I do that? I avoided it because it seemed dangerous.
I should reiterate that the command to takeoff was done while the drone was in guided mode. I think the loiter mode is the original mode before I commanded guided mode using Mavlink. Does this make sense?
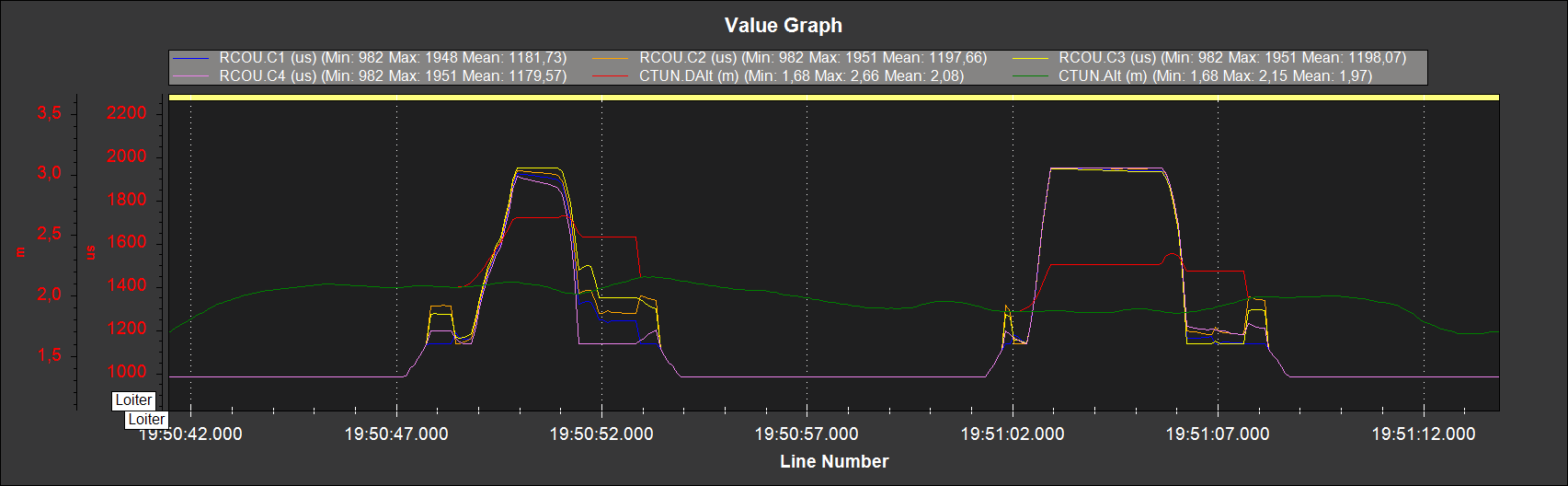
If you performed an autotune, then it seems that the new PID values are bad and the drone is very unstable, so I suggest you to perform a flight with the default PIDs and upload that log to see the differences.
The drone wasn’t in guided mode, the drone was all time in Loiter, you can see it in the logs and in the pictures above.