Hello, I am very grateful for all the help I received here, but once more I will have to ask for your help regarding a problem which I cant find the answer to by myself.
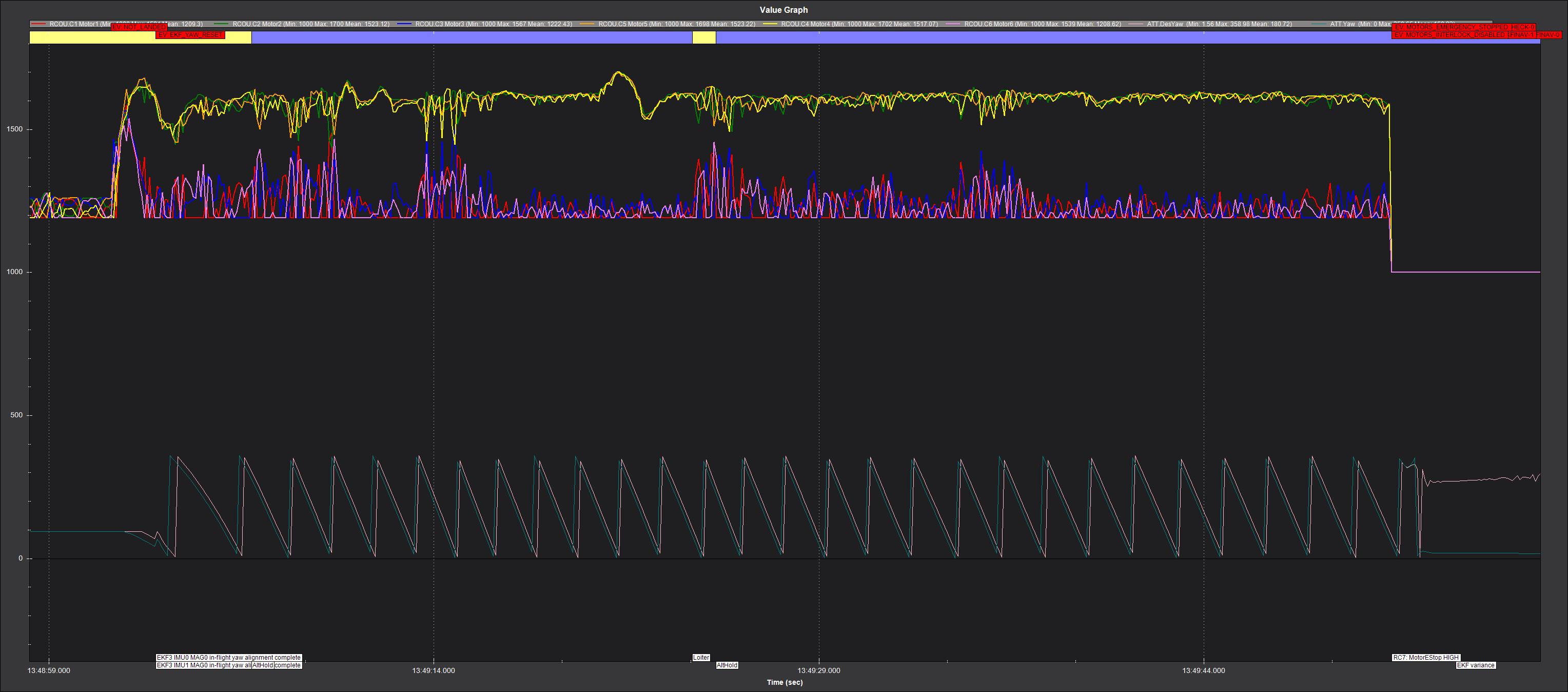
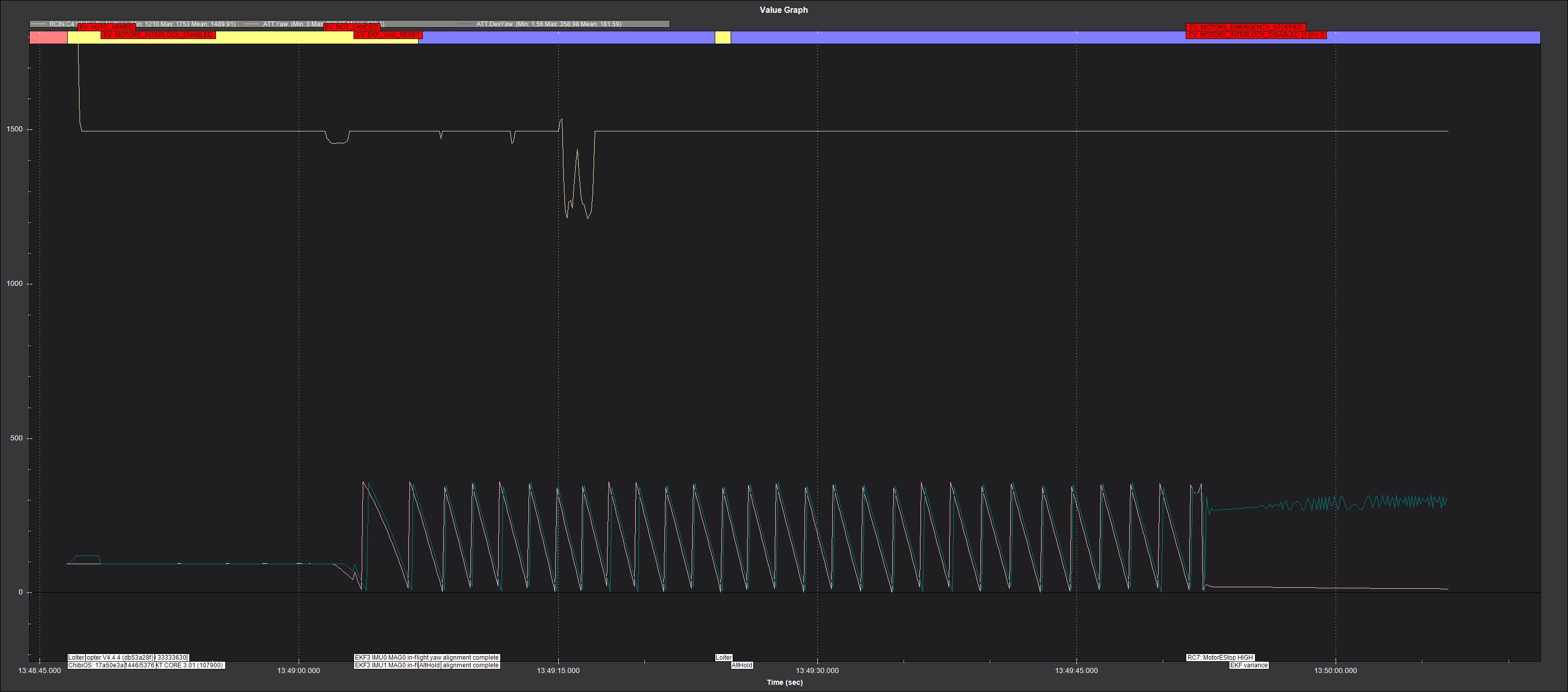
During testing the drone completed several normal flights without any accidents(around 2h of flight time), but on the last flight the drone started uncontrollably yawing almost immediately after take off without any pilot input. After I reviewed the log I saw that the actual yaw and desired yaw are closely matching, the signals to the motor also indicated controlled yawing and no motor failure.
The drone was armed after the rather hard landing and all the motors were working.
Any help on finding the cause to this bizarre behavior will greatly be appreciated.
Thanks in advance.
Nikolay link to the drive containing the log
This is how yaw saturation looks like: the firmware sees that the copter cannot keep yaw straight, and “gives up” by relaxing the desired yaw. (An alternative to that is not keeping altitude: falling down or skyrocketing up). If you logged the PID values, you could see the “limit” flag set for the yaw axis.
So it’s most likely a power train failure, hard to detect which one (ESCs, motors, props…). There is no ESC telemetry, so it’s impossible to see whether motor output correlates with the matching RPM. Among other reasons, it can be due to propellers slipping; if the prop handling screws are all the same direction on all motors, this may explain why motors of one direction are struggling to provide any thrust.
Thank you for your timely reply.
Just now I noticed that the faster spinning motors (2,4,5) should actually rotate the drone in the opposite direction (CW), but the drone is turning CCW. Motors 1,3,6 are hitting the minimum inflight throttle and that’s why there is just no room for more CW torque(without the drone flying up) . Sometimes I miss the obvious things . The drone was empty during the flight, but it is designed to fly with a 5kg payload. Do you thing that if the drone was heavier the yaw could have been compensated ?
The power train is T-motor MN6007 160kv with T- motor Alpha HV ESC, sadly I still haven’t managed to get the telemetry working (without the T-motor “Data link v2”). The propellers are attached with 2 M3 bolts , so slipping is impossible. I will investigate more on what might have caused a motor to stop (my main suspect will be the servo lead).
The way motors are spooled up suggests me that the copter is not that overpowered to lose control solely due to that.
Assuming motors, propellers and ESCs are intact (which I am still not sure about), I would suggest looking at the sources of parasitic yaw torque in the copter body itself. If it was flying that way without payload, it might be that the empty mount interacted with the air flow coming from propellers in a way that introduced a lot of yaw.
It’s difficult for me to imagine such a strong parasitic torque source on a hex, but I’ve seen that in funnier craft such as CoaxCopters, with some structural elements effectively cancelling the torque of some motors.
I have been looking at the log from the previous flight(nothing has changed between the flights).
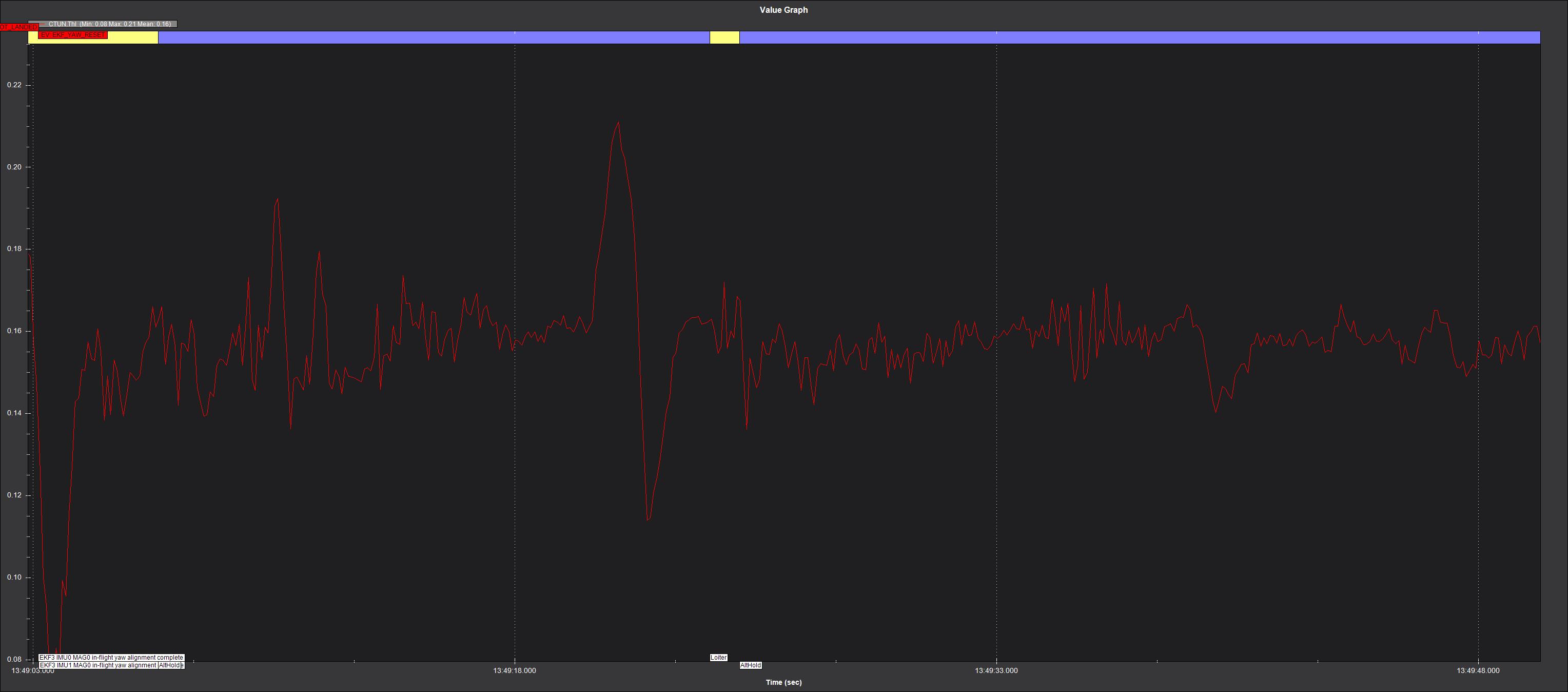
I think I found the possible reason for this behavior. One of the motors might have been out of alignment and tilted to one side on its arm, crating a yawing moment. I have came to this conclusion due to the fact that the average ThI values from the previous flight and the problematic one have only a small difference, 0.14 and 0.16 respectively
, which for me is contradictive to a motor loss. My understanding is that if one motor fails the throttle(ThI) value should be higher in order to compensate for the lost thrust, please correct me if I am wrong. Also I have noticed that even in the previous uneventful flight(log28) the same motors (2,4,5) are receiving higher PWM values
, which means that the AP is fighting some sort of externally induced yaw. I suspect that due to vibrations or poor assembly one of the motor mounts became loose and tilted by a few degrees.
This is the type of motor mount that was used on the drone, and it did not have the center rivet.
P.S Log 28 is in the drive folder too.