Please see log.
https://drive.google.com/file/d/1lfxma4XeOU-zWRXKGfhWQ8nALwVJQAKF/view?usp=sharing
Let me know what you think is the right place to start. - This is a 3DR Solo - just a bit too aggressively tuned.
Please see log.
https://drive.google.com/file/d/1lfxma4XeOU-zWRXKGfhWQ8nALwVJQAKF/view?usp=sharing
Let me know what you think is the right place to start. - This is a 3DR Solo - just a bit too aggressively tuned.
I would set these, do another test flight and lets see that log. The harmonic notch filter settings may need a bit of adjustment.
Autotune will sort out the rest once you are happy with it.
INS_ACCEL_FILTER,20
INS_GYRO_FILTER,40
INS_HNTCH_FREQ,97
INS_HNTCH_BW,48
INS_HNTCH_REF,0.22 ← this will have to be rechecked after more flights
INS_LOG_BAT_OPT,2
MOT_THST_EXPO,0.65
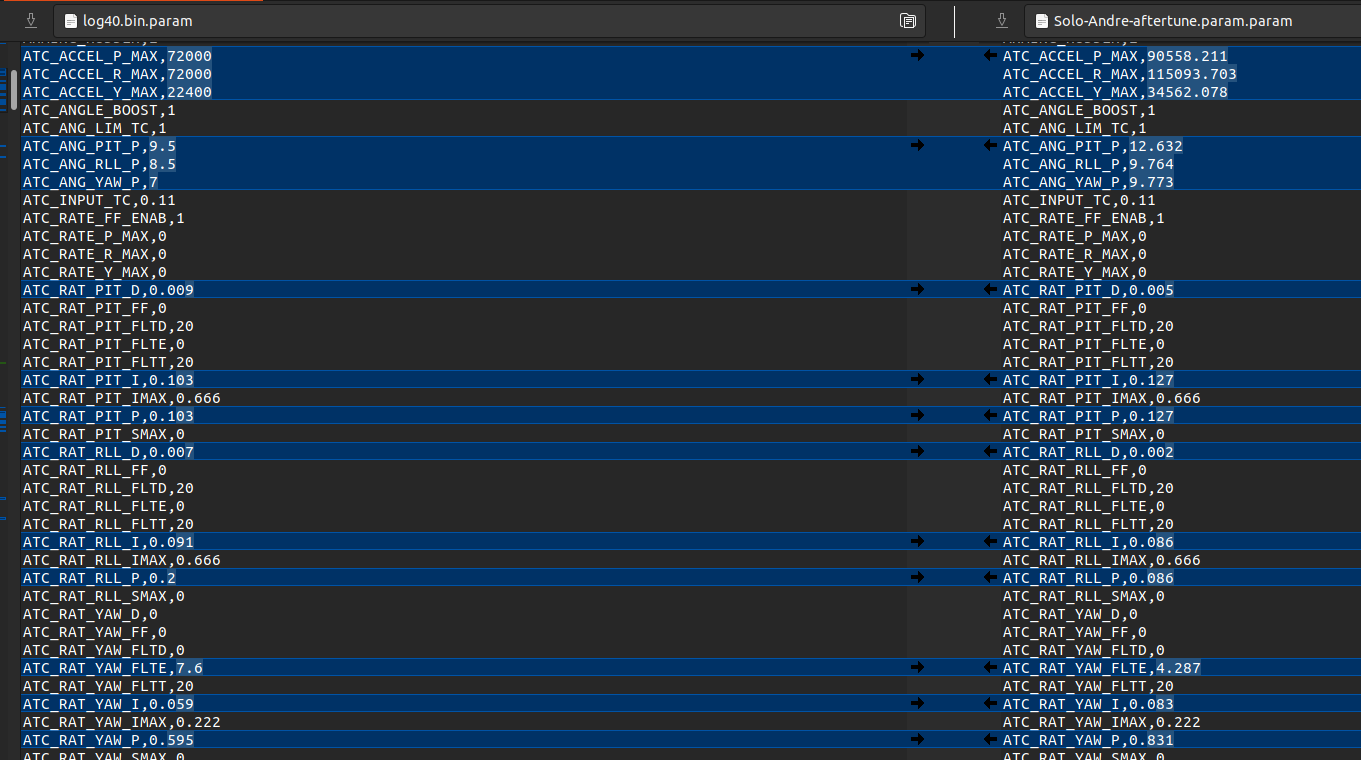
@xfacta good point, it was on time to try AutoTune again, instead of overthinking it.
The resulting tune seems fine, except in loiter, Loiter seems “imprecise” when decelerating. (I pick up some speed, then center the stick, and the copter changes the attitude “too many times” during deceleration) - doing the same in althold feels fine and precise. (except no expo on the sticks of Solo controller)
https://drive.google.com/file/d/1ctXVFTeLGKNewbkSFL-WFOgGxMzhGXr4/view?usp=sharing
This are the changes : rather big P changes:
The HNOTCH settings are working great, you can set
INS_LOG_BAT_MASK,0
INS_LOG_BAT_OPT,0
For the small movements in Loiter there will be a bit of testing:
Start by reducing the D term to 0 and halve these others
PSC_POSXY_P 0.5
PSC_VELXY_D 0.0
PSC_VELXY_I 0.5
PSC_VELXY_P 1.0
See if that fixes it, if so start increasing them until the issue reappears, particularly find the correct D term that works.
Also you can try lowering the value of these, just 0.5 steps
PSC_VELXY_FLTD and PSC_VELXY_FLTE
@xfacta Thank you.
for the record - once I reduced PSC_VELXY_D to 0.3 - it flew fine. - I was kind of surprised, that the D-term needed reducing, then the PSC_VELXY_P could be even further increased to 1.4