I am a beginner and using pixhawk 2.4.8 for my quadcopter. In loiter mode the drone suddenly goes up and down. When I raise the roll, drone lands automatically. kindly help me on this.
No of lines 26305
Duration 0:01:17
Vehicletype ArduCopter
Firmware Version VDD_5V_PERIPH_nO
Firmware Hash 93448b71
Hardware Type
Free Mem 0
Skipped Lines 171
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
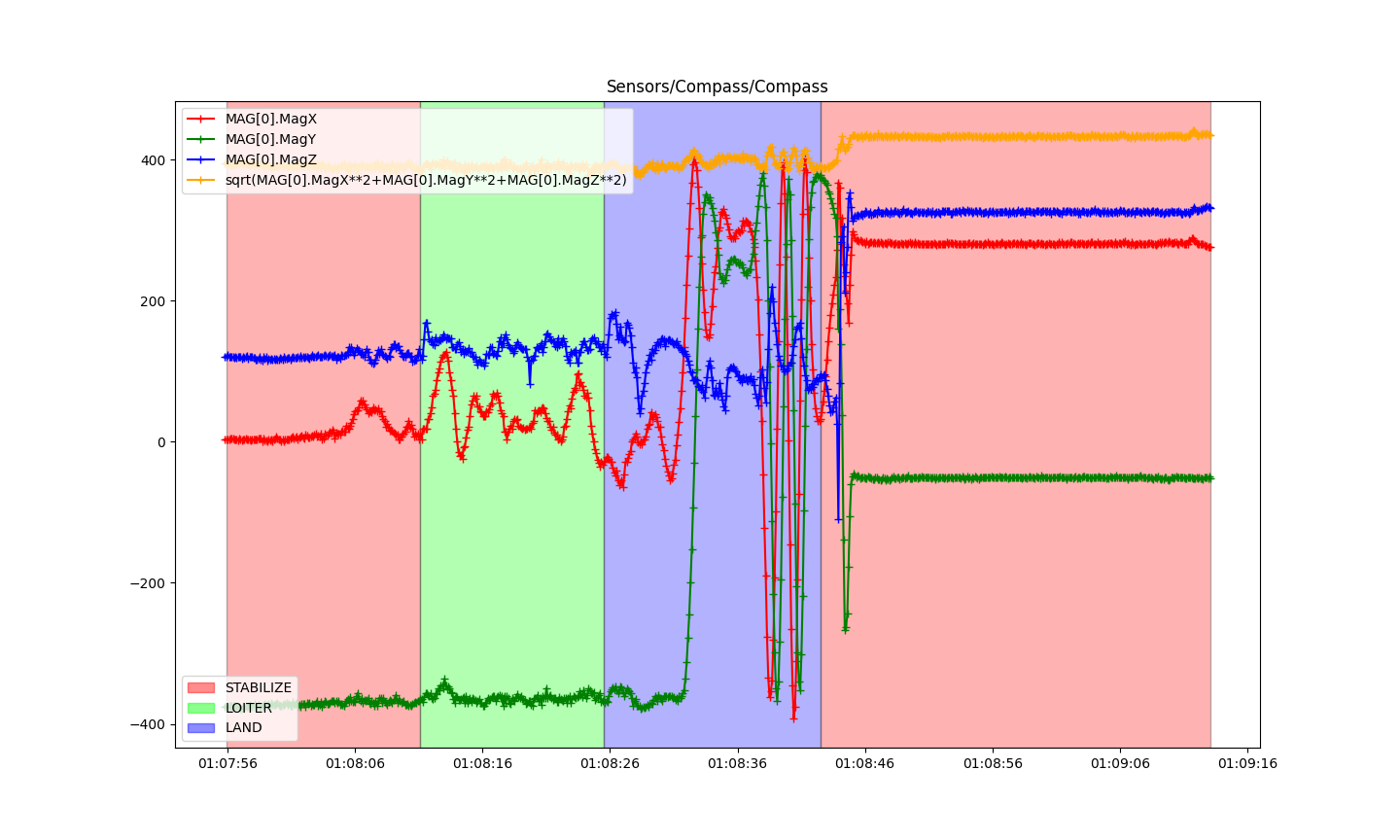
Test: Compass = FAIL - FAIL: Large compass offset params (X:541.38, Y:72.50, Z:107.15)
FAIL: Large compass offset in MAG data (X:541.00, Y:72.00, Z:107.00)
Large change in mag_field (89.07%)
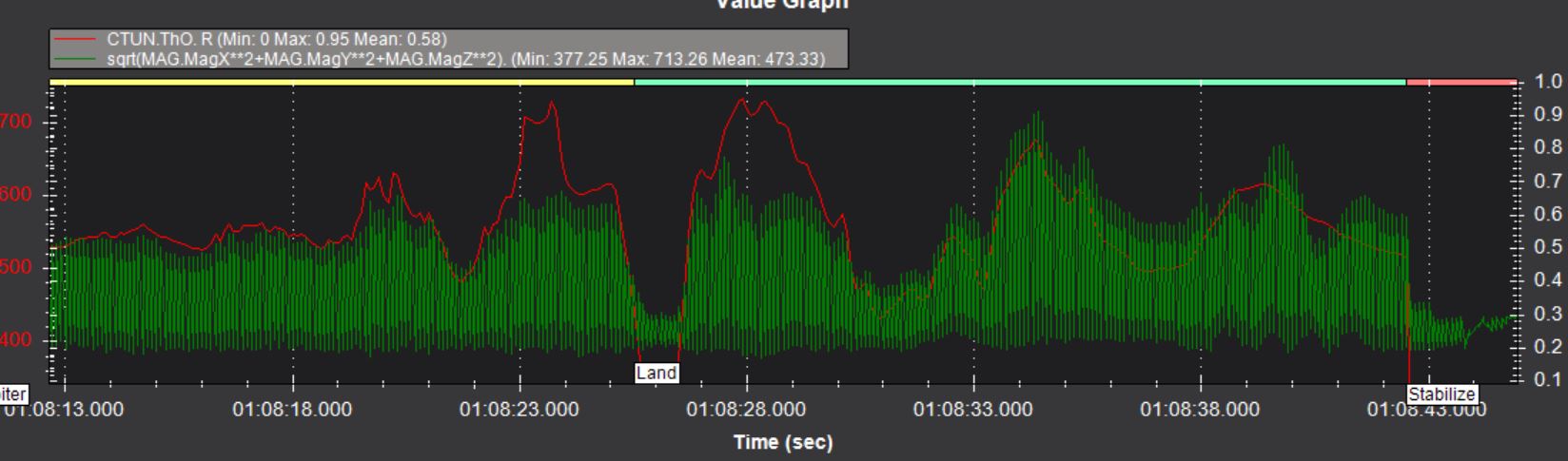
Max mag field length (713.26) > recommended (550.00)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
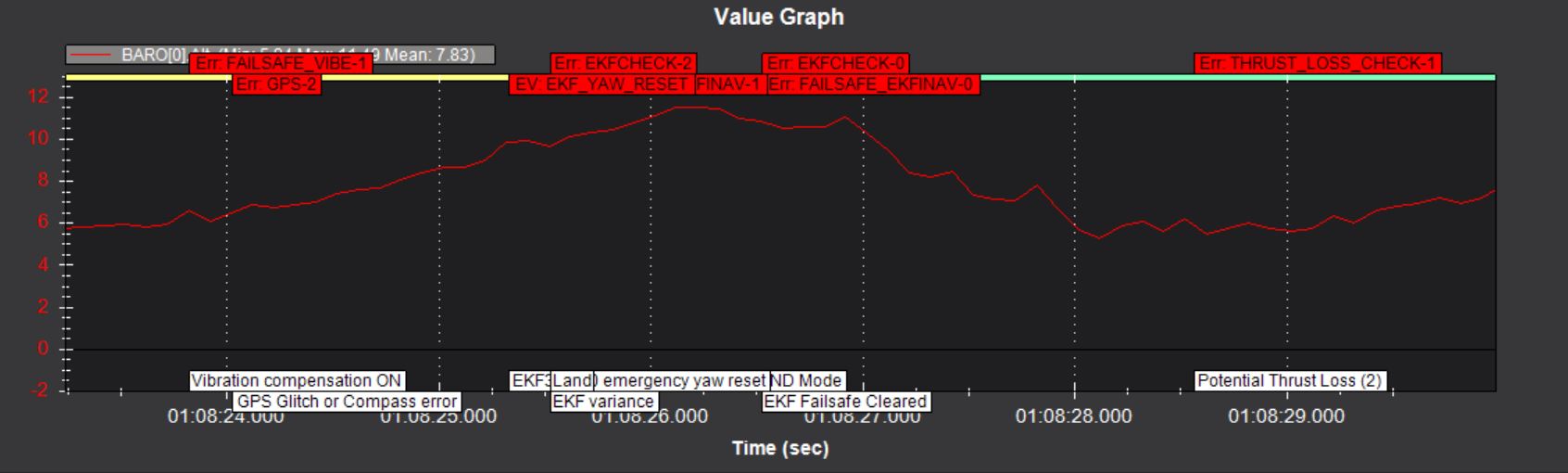
Test: Event/Failsafe = FAIL - ERRs found: CRASH GPS_GLITCH
Test: GPS = UNKNOWN - join() takes exactly one argument (2 given)
Test: IMU Mismatch = NA -
Test: Motor Balance = UNKNOWN - ‘QUAD/X’
Test: NaNs = FAIL - Found NaN in CTUN.TAlt
Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - ‘FLOW_FXSCALER’ not found
Test: Parameters = FAIL - ‘MAG_ENABLE’ not found
Test: PM = GOOD -
Test: Pitch/Roll = UNKNOWN - ‘BarAlt’
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data
F450 frames are not very rigid. Especially if they are clones. If your motors or props are in poor condition that can also contribute to vibrations. I have an old F450 collecting dust. I had to use a lot of soft mounting on the flight controller to make it able to fly and the vibrations are still off the chart. Not my favorite solution, but it worked for a test mule.
As @Allister suggested your best bet is to use a ball mount for the Flight Controller on those flexy frames. Balance the props. If they are the self-tightening type, replace them with standard props with nuts, they are easier to balance. That’s an old GPS module, performance won’t be that good. Actually it looks like all the components are sub-par which will make it a challenge going forward.
Looking at that log again pretty much everything that could go wrong did go wrong:
I see we have a new Banner message to indicate the wrong firmway is being used by detecting flash. But it indicates the wrong version to use. Pixhawk1 is correct in this case (generic Pixhawk 2.4.8):
And the Initial Setup Parameters were not set. This is for pre-maiden flight. And your battery looks questionable. Those ESC’s may be new but they are very old technology. You would do much better with some BLHeli_32 units.
You don’t need to get a bigger battery, you need to get a healthier battery. Given that your motors are already running at max, a larger battery is just going to add weight and magnify the problems. A 2200mAh battery will work, but it needs to be in better condition.
Also keep in mind that repeated use of a LiPo battery below 3.5v/cell will quickly deteriorate your overall battery performance.
Could be lots of things, but here’s what comes to mind:
poor compass calibration
compass interference from the motors or other sources of EMF
poor GPS signal quality (Don’t assume a high number of satellites means you’re getting good positioning)
Poor GPS or Compass mounting causing relative movement between them and the flight controller.
Assuming the mounting and hardware is good then you can try a couple of things:
Have a Geofence set up, even if it’s significantly larger than you ever think you’ll need. This will make sure you always have a proper GPS lock before you take off. It will mean having to wait a few extra minutes on a cold boot up, but the safety factor is worth it.
Re-do the compass calibration outside with a solid GPS lock.
Once it’s flying and all other issues are sorted out then run a MagFit test to further calibrate the compass and set up COMPASS_MOT.
Question for you @Allister. Does this function exist in MAVExplorer? I don’t use it as often and there seems to be a problem with Mission Planner’s tool at present.
Thank you @Allister
one last question, you mentioned that “compass interference from the motors”
I am not aware about that, I would like to know how motor will interference the compass?
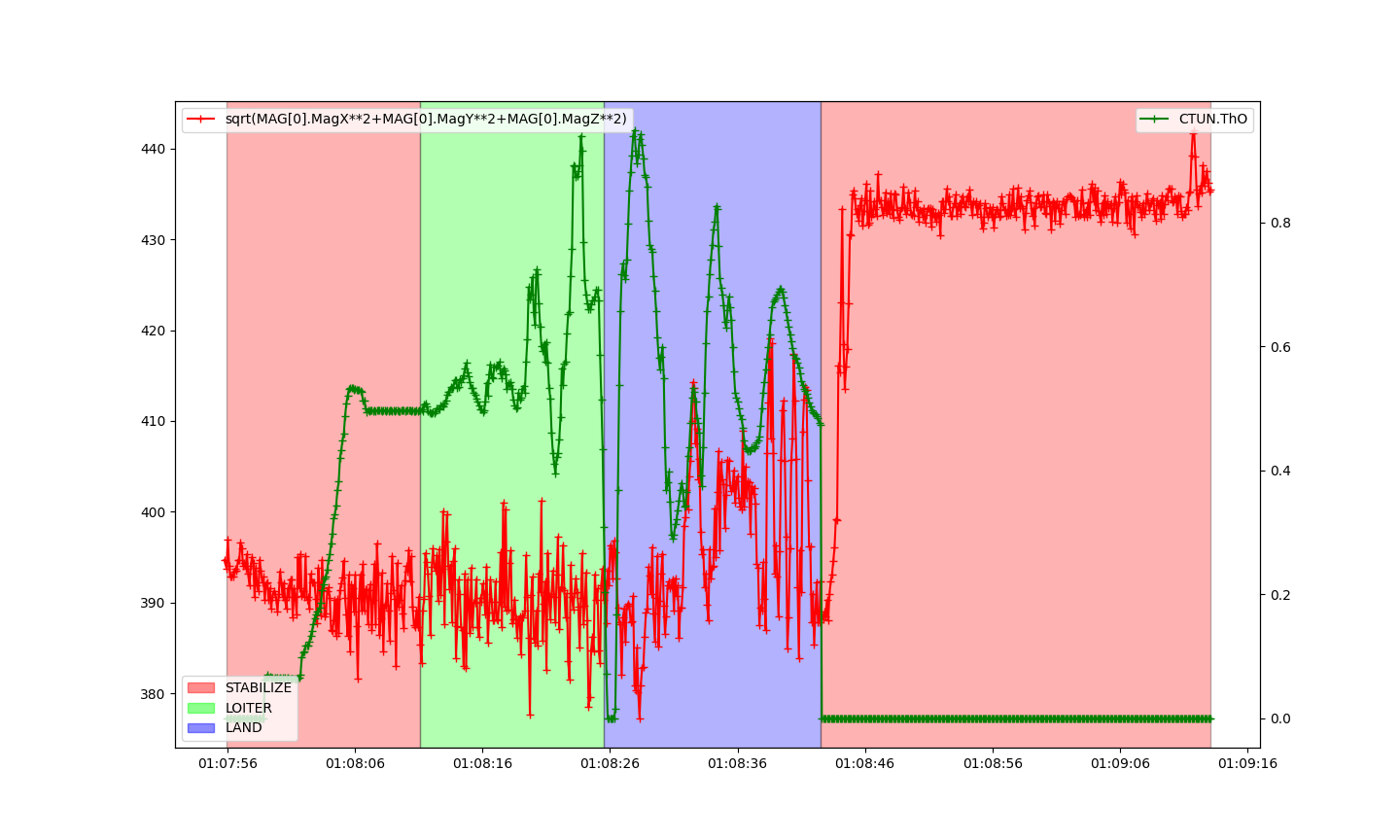
So usually just cheat all the typing by first running the normal compass graph, and if I see an issue then I key back in the terminal window until the graph with the {sqrt…} shows up, delete the mag values and add CTUN.ThO:2.
Motors are just opposing magnetic fields thrashing around until something moves. If the ESC, power leads, and the motors are not properly positioned, shielded and grounded that will allow random magnetic fields to interact with the compass. The compass doesn’t “point north”, it is just recording the magnetic fields it sees. It doesn’t matter if the fields are from the earth or not, the compass doesn’t care or discriminate. Using MagFit and COMPASS_MOT we can create a correction factor that will adjust for that interference as we increase the throttle output or current values.