Hey,
I’m using Arducopter 3.5.0 with mavros 0.26.3 on an erle-brain-3.
I’m publishing the following hil gps message to /mavros/hil/gps
header:
seq: 337
stamp:
secs: 1536232886
nsecs: 525829527
frame_id: ''
fix_type: 3
geo:
latitude: 10.0
longitude: 10.0
altitude: 200.0
eph: 2
epv: 2
vel: 65535
vn: 0
ve: 0
vd: 0
cog: 65535
satellites_visible: 255
---
Through QGroundControl I have also set the GPS_TYPE to 14 (Mav).
I have restarted the system.
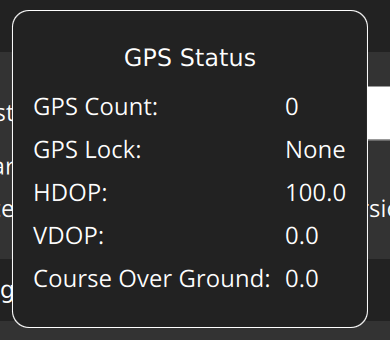
Ground Control does not show a GPS Lock:
I’ve been playing around with the parameters, but haven’t found anything useful. I can’t seem to find anything helpful on the forum.
what am I missing?
My next step would be having a closer look at the arducopter source code but I was hoping for an easier solution.
best wishes,
Raphael