Hi, can anyone help me in the error below, I am using Pixhawk 4 with Mission Planner with two GPS. I decided to use two GPS because I was getting EKF errors during the flight that I almost lost my drone. Today’s error in LOG was momentary and I managed to control the drone later.
I don’t feel safe with Pixhawk 4, when everything is ok during the flight it always comes up with an error and the consequence is the lack of control
og File C:\Users\aniba\Documents\Mission Planner\logs\QUADROTOR\1\2019-08-31 10-39-35.log
Size (kb) 20080.3388671875
No of lines 234253
Duration 0:11:39
Vehicletype ArduCopter
Firmware Version V3.6.10
Firmware Hash 1c04a91e
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = GOOD - mag_field interference within limits (10.94%)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD - Test: Event/Failsafe = FAIL - ERR found: GPS_GLITCH Test: GPS = UNKNOWN - join() takes exactly one argument (2 given)
Test: IMU Mismatch = GOOD - (Mismatch: 0.59, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = GOOD - Motor channel averages = [1661, 1636, 1657, 1693]
Average motor output = 1661
Difference between min and max motor averages = 57
Test: NaNs = FAIL - Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘THR_MIN’ not found
Test: PM = GOOD -
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data
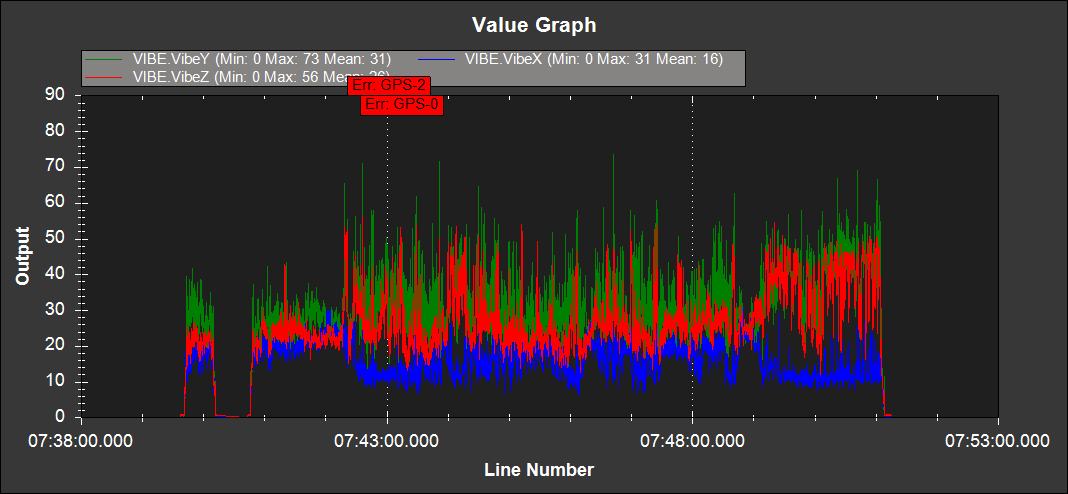
I say the props are out of balance because of the high Y vibes. looking at my logs it is unusual to see X or Y higher than Z. That said, I am no expert so possibly @dkemxr will look through this for you too.
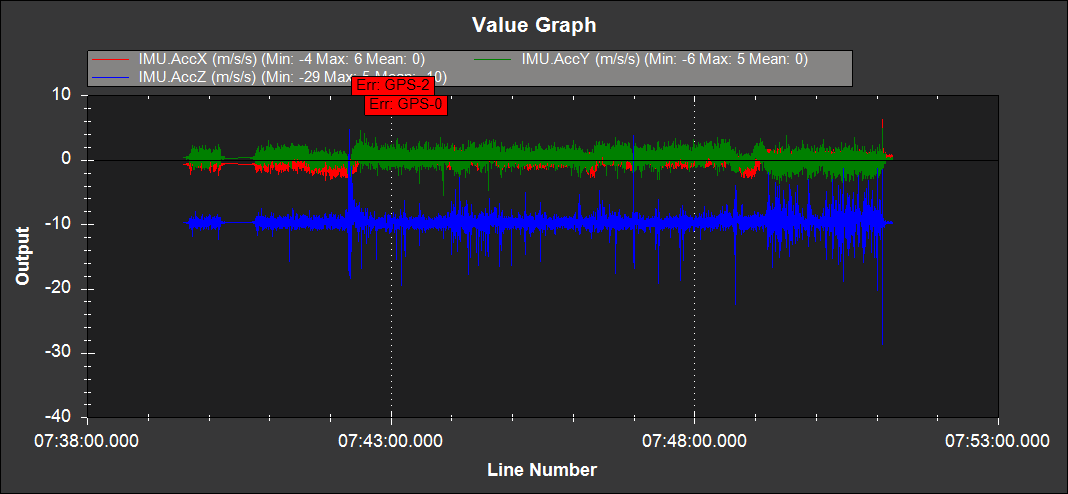
I agree with Curt. High vibes on Y and Z resulting in accelerometer clipping on those axis. If the props are balanced maybe it’s an inherent frame problem. What is this craft and how is the flight controller mounted?
Firstly thanks for your attention, the data is below and the photos are in the link
Engines: EMAX 2216 - 810 kv
ESC: DYS ARIA 40A BLHeli_32 Dshot1200
Propellers; 9443
Weight 1.8k
Frame: HobbyKing 500
It was redone in carbon fiber strictly obeying the measurements of the original that broke in a fall, I find it difficult to be of the new structure and yes of the original design, what do you think?
A doubt, in acceleration felt a lag in response, may have contributed?
Sorry my english
Maybe a photo of the craft would be helpful. How is the Flight Controller mounted to the frame? And just to check some other things what battery power (3S, 4S) and I assume the 1.8kg includes the battery?
Looks good. Maybe it’s just the fact the motors are working too hard from overweight/underpower. The average PWM output at hover looks to be ~1700. I would try larger props.
I doubt that Radiolink GPS module is doing you any good blending with the other one.
If you wanted to use Emax motors the 3506 650kv with 12" props would be good. 350x 650-700kv with 12" props in general I would say. 6S would give you some interesting options.