Hi,
recently I flew an Octo quad x8, using Tmotor u15 motor, 40 inch props and cube orange + with dual here 3 GPS.
Used Tmotor 30 Ah, 5C battery with the above setup. (2 - 6s in series ----> to make 12s).
Made all the necessary setup of parameters using mission planner and here link.
While doing the first test flight, I armed the drone and took off in position hold mode, and tried to hover it around 5 m from the ground, the drone started doing abrupt roll and pitch action above a stationary location(stayed at a particular location) and ultimately flipped upside down in the air and crash-landed on its back, the drone caught fire and everything turned to ashes. ( this all happened within 4-5 seconds). please see for the 2-3 m from ground altitude drone took off in stable condition.
So, there is no autopilot left to provide the logs from so logs are out of the equation. Can experts from this community suggest what could’ve gone wrong? Is it because of the cube orange+ that it is not capable of flights with big systems such as mine? (just saying)
Please help me so that I can give it a try one last time.
The first sign of negligence here is that you took off and hovered in PosHold mode for a maiden (!!!). You should never do that - start off in stabilize and go from there. And if you don’t have a pilot capable of flying in stabilize, train someone up on a much smaller platform.
Had you switched to stabilize (or ideally taken off in stabilize) you would have been able to see the oscillations and immediately start landing.
There’s so many things that could have caused that instability…
When you say T-Motor I immediately think of ESCs right out at the motors with extremely long signal and power wires, and cringe
I would try to move ESCs inboard more and have longer motor wires than power wires. On the power wiring you’ll need extra capacitors right at the ESCs, probably at the distribution point too, and twisted wires.
For signal wiring you may need CAN nodes right near the ESCs so the PWM signal only travels a couple of inches, instead of several feet. Or I’d probably be using ESCs that do CAN comms natively.
If I was building something with 40inch props I’d be trying to simulate it in Realflight first. A month and few dollars spent doing that would be less than the cost of props. Even if it’s just to find out some slight variation in default parameters that would help with initial test flights.
@manavgandhi17 is correct that the problem is you did your first flight in PosHold mode.
The first take-off is the most dangerous flight on any aircraft as you have no idea if the tune is stable or not. By using PosHold you use not only the attitude controllers but also the position controllers.
My guesses:
1-) You used a 5C battery. Is it true? If it is correct: It could not give the current needed by the motors and the battery burned out. Anyway, if any ESC fails, the Drone won’t catch fire all of a sudden. First the smoke comes out and then it starts to catch fire.
2-) When making a large-sized drone, make sure to use vibration dampers under Flight Control. The vibration damper in the autopilot is insufficient in large drones. The vibrations caused the tool to lose directional control and spin out of control.
Probably even if you flew in Stabilized mode, the instrument would still burn.
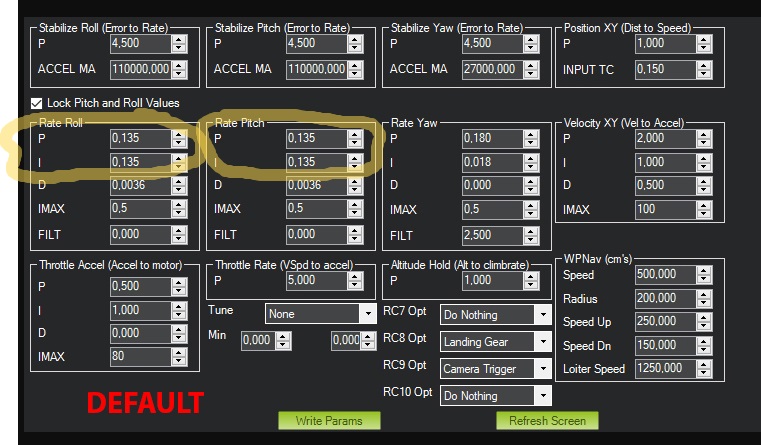
If you left the PID settings at the default value, fatal error may have occurred. Lower these values to about 0.075 on large instruments. After the first flight, you look at the decrease and increase status.