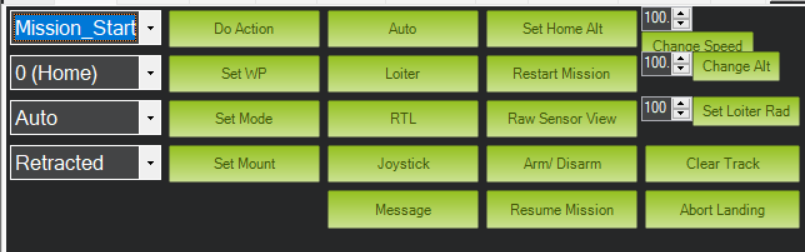
In the first picture I then clicked Arm/Disarm button which armed the drone then i clicked Do Action and it did not work as it said something along the lines of mission_start failed to execute. It now also says PreArm: Need Position Estimate which I am not sure how to fix. How am I able to fix this error, and are the actions I did above correct just for the drone to hover at 0.5m for 5 seconds then land?
First, always post a .bin flight log now that this craft is arming.
You will have to set several parameters for this to fly w/o an RC system.
AUTO_OPTIONS,3 (don’t just set it read what these options do)
Re-read the Non-GPS Navigation/Optical Flow Wiki.
5 seconds is not practical nor is 0.5m. Increase both so it’s out of the propwash and has time to establish the altitude.
Sorry but this is like a Doomloop thread. Waiting for something bad to happen…
And I suppose you posted in the wrong thread? This is 4.4
Apologies, I forgot to mention that I will post the .bin file tomorrow since I don’t have the drone with me to connect.
Thank you for this parameter, can I ask what the other ones are or are they listed in the topic you’ve mentioned? I think in terms of getting the receiver, I’m not sure how long that will take to arrive or how long tuning the RC system will take since I have less than 3 weeks, limited time access to the drone and other work etc.
As for the error I mentioned, would that be set if I changed that parameter, I thought it must be either the GPS or optical flow that was causing this.
As for the post, I believe I’ve always posted 4.4? I knew in my first post I put the wrong one and think it was changed to 4.4 (unless I’m mistaken) and thought 4.4 was correct.
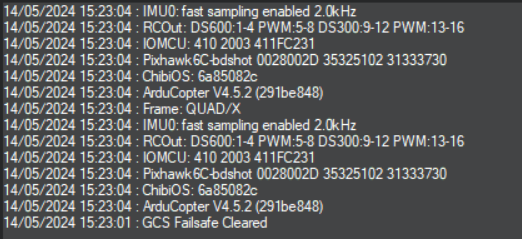
I don’t know what you mean by this. We are talking about the firmware version you are using on the Flight Controller and it should be V4.5.1. This is shown in the messages screen. Is it? If not update the software.
Sorry for the confusion, but yes it is 4.5.1 the latest version and can even confirm tomorrow. Could it be solely because my delay and altitude are too low? do you have a more solid suggestion? I’m sure I’m following the right steps to get it to hover in place and land but I could be wrong.
Unfortunately I don’t have the drone with me at the moment but tomorrow I definitely can post the .bin file to confirm this. I’m also using an optical flow as I’m trying to fly indoors.
Please read through the documentation. There are various things you need to do in order to make this work - turn off GPS pre-arm check, set EKF origin and home via GCS, etc.
Thank you. I believe I have went through this documentation but I will check again to see if I have set these parameters accordingly and in the morning will post the .bin file.
No, it will not reset your parameters. All your settings will persist through the update and if parameter names changed they will also be migrated to the new name.
However that only works when you upgrade but not when you downgrade the firmware.
Thank you for confirming. Can I ask, are my EK3 parameters correct? I thought VELXY would have to be changed from 0 to 5 since I’m using the optical flow and I calibrated it through log based calibration.
that depends on what exactly you downloaded. If it was labeled 4.5.2-stable you don’t need to download it again.
I don’t have any first-hand experience with optical flow, but from what I can gather from documentation EK3_SCR1_VELXY = 5 seems right.
That wasn’t set in the last log you just uploaded though. There EK3_SCR1_VELXY was 0.