Hey @Yuri_Rage, I hope you are doing good. After so long, I continued my work (have been busy in my academic work).
I am using the GPS for Yaw configuration and I noticed that the compass error shoots up as I make the yaw movement. I know GPS for YAW will not give results as precise as a compass can do. But I want to know, is it okay to turn off the compass and fly completely in GPS for Yaw configuration? (My compass is experiencing a lot of interference).
and one more think, what graph plot I should look at to see how good the GPS for YAW is working? here is log for your reference: 2024-01-21 11-39-45.bin - Google Drive
I don’t see an issue with disabling the compass at all, so long as you’ve experienced good GPS performance to date. That’s how I run most of my Rovers, and GSF fallback takes care of any gaps in data. There should be no appreciable difference in Copter. The issue isn’t precision so much as update frequency, but, again, I don’t see an issue.
To analyze performance, look at EKF innovations in the log.
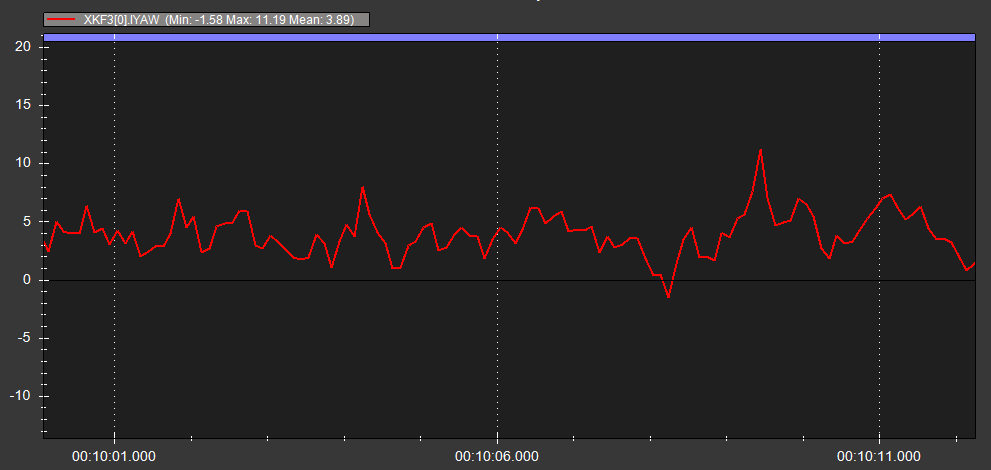
Graph XKF3[0].IYAW using Mission Planner like this:
Here you can see that the mean innovation for this brief but representative section of your log is 11.2 degrees, which is actually pretty high, and quite probably skewed by the compass interference that you mention. By comparison, my very noisy mower that uses only GPS yaw sees a max innovation less than that, with the average being 1-2 degrees.
Thank you so much @Yuri_Rage for your quick response. I have disabled the compass, as per now I have set the EK3_SRC1_YAW=3 (GPS with Compass Fall Back).
You are right, it works really nice. The yaw degree innovation in hover flight is almost zero. I have flown some small mission and I noticed the error grows during the yaw turns but the EKF innovation is still under 0.5 (but yaw innovation went up to 7 degree).
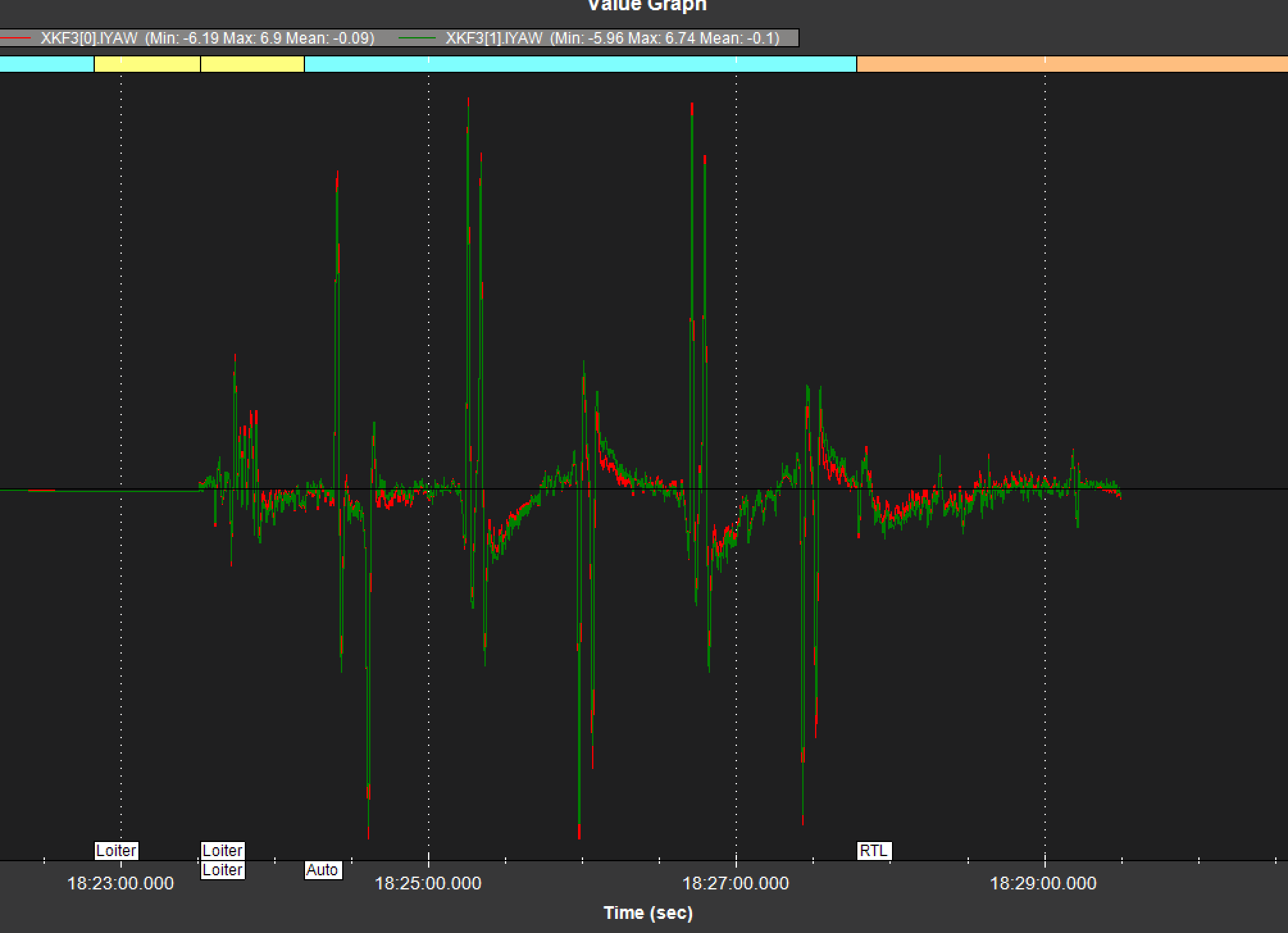
What is the source of XKF3[1].IYAW? is it based on the compass data? If No then what is the plot for heading error of compass data? the XKF3[0] and XKF3[1] for yaw are almost same.
It estimates the heading by comparing GPS outputs to the IMU movements so if there is a lag in GPS then it calculates only based on IMU movement?
and can you please help me in one more thing? I am using mauch 100A sensor with Pixhawk 6C. I have put the voltage divider and Amp per volt values as per mauch instruction, it shows the correct voltage but the “prearm: battery is unhealthy error” is keep on coming no matter what BATT_CUR_PIN and BATT_VOLT_PIN I am using, so currently I have disabled the batt_monitor to fly but it is not safe.
Always looking forward to hearing back from you. Thanks!
If you have the compass disabled, then set EK3_SRC1_YAW=2.
The different log indices are for each EKF instance (one per IMU). They should be similar in value.
Look through all of the battery parameters and make sure they are set appropriately. You may have a failsafe parameter mismatched with the size battery you’re using.
No! I have not disabled the compass, I have set it as a fallback for EKF.
Yes! thanks, Number of EKF is always based on the IMU, as I have set the EKF source for heading to GPS so it is fusing each IMU with the GPS and plotting two graphs.
As I have not disabled the compass, can I still check the heading error by compass data? I just want to compare with the GPS heading error.
I have set the battery parameters correctly and cross-checked again now, I guess there is a problem in setting the BATT_CUR_PIN and BATT_VOLT_PIN, what values should I set for the Pixhawk 6C?
In my last flight I faced a GPS glitch Issue which resulted in crash. This is the first time I am facing such kind of issue. I have read the wiki page about the GPS glitch error. I really don’t know how come it happen? I was flying in a clear sky and in open farm, hard to believe that there could be a GPS glitch in such environment.
My GPS is UM982 based (Dual antenna), do you know what could be the best way to set it up? I did not set the GNSS_MODE to 2 constellations, I will set it properly. Apart from that is there anything else I should do to make sure that this GPS glitch issue will never happen again in future? I have mounted the GNSS receiver board on top of the Pixhawk & surrounded by the wires (but Antenna’s are away and properly installed), Can GNSS receiver also have the interference issue?
Just for the info, I have tried to check the logs but it is showing that FMT message is missing.
@scientist_bala , I am no expert so I only can give some brainstorming like ideas.
You first noticed Gyro & Accel errors followed by a Failsafe RTL. Additional you noticed a low power message. Now you noticed GPS glitch, was this the same flight as before or a following flight. Did you find out the reason for the low power message? Is it possible that you have ageneral power problem by some bad connections etc. ?
Yes! this is the second followed flight. After the Gyro & Accel error, I checked everything especially the power wires. I did not find anything, everything looked good so I first put a hover flight for 10 minutes and then flown in the Auto mode where I got the GPS glitch error.
Is it possible that Pixhawk 6C not supplying the enough power to the GPS & Receiver? Maybe there is some voltage drop from the 6C side because I had a issue of low receiver voltage too. Should I supply the separate power to receiver and GNSS?
You’re probably onto something with the low power message. Figure out what’s drawing too much power and use a different wiring path for that component. It’s not really worth troubleshooting anything else until that’s sorted (and it’s probably the root cause).
@scientist_bala I am not sure if i can give the right inputs, others as @Yuri_Rage are experts.
But how is your HW setup. So which part is powered from which source and which connection.
Is thelow power reading of your receiver just a direct function of the receiver and directly transmited to the transmitter or is it a reading which is on any kind handled by the Pixhawk?
Above you had a disccusion about using two GPS rceivers you are using as movong base. Is this still the case?
Also yuri figured out that you had a problem with your battery setup before, is this 100% solved? What was the reason and what did you changed.
I am not able to open / read your logfile: Following message popsup “Log Browse will not functiion correctly without FMT messages in your log. These appear to be missing from your log”
Maybe your SD-card is damaged or the Pixhawk makes also write errors due to power problems?
Thanks for the reply @Yuri_Rage
I checked all the power wiring and not able to see what could be faulty. My question is, if there was a power issue then how come the pixhawk was still powered? The receiver and GNSS were powered from the pixhawk.
In both the cases (the receiver voltage low and GPS glitch), the drone was landed in a failsafe mode and it was connected to the Mission planner where I can see the parameters. Means, the pixhawk 6C was powered all the time otherwise drone would have shut down and fallen from the sky.
It would explain sensor glitches and SD card corruption quite easily. There may have been just enough current to keep the critical memory and CPU functions going but not enough to function properly. That’s my theory at present.
Just because the wiring “looks good” doesn’t mean you’re powering all components on circuits that can handle them. GPS modules are notoriously power hungry and may need power from something other than the autopilot’s own voltage regulator, especially if other peripherals are competing for power on that circuit.
Thanks for the reply @Juergen-Fahlbusch Sir.
Your inputs are totally amazing and each single input matters.
The battery is connected to the Mauch sensor and all the ESCs. Mauch powers the Pixhawk 6C and the receiver & GNSS are powered and connected to Pixhawk 6c.
Yes! a direct function
Yes! I am using a moving base configuration for Yaw estimation (GNSS is based on UM982)
No! I am still figuring it out. I have been flying this drone for few days and had a 7-8 successful flight before this issue started.
I will change the SD card, don’t know about pixhawk making error due to power problems.
Thanks again for the reply @Yuri_Rage
This is insightful.
Thanks! It makes sense, The mauch sensor connects in series to the load and maybe due to the ESCs load fluctuation something is happening because both the issues came in high wind environment.
Okay! understood. But I have always used GNSS powered by the FC and never had any issue. The only problem is supplying the power from other source is finding a reliable BEC module.
One more thing, How good is Holybro PM02 V3, rated continuous current is 60A. My continuous current is around 50A, how good are their power module? I did not trust the data that’s why I am using mauch sensor (100A) for powering and current sensing.
@scientist_bala , I have no experience with ardupilot and FC-boards so on this point it is good to follow Yuri’s recommandations. But on standard RC-electronics i have some experience over decades. I have learnt, if the receiver shows a power problem than there is a (serious) power problem. All what yuri stated I can agree. Also if the connection seems to be ok it is not always so. It could be some not so good soldering or crimping. Also the cable size, length and size, can have drammatical influence if all power is routed throught the same wire. If I have high loads like motors i always try to keep the power wires as long as possible from the powerlines of the electronic. So i place the seperate BEC for the electronic as near to the battery connector as possible.
And also it is question of the real health of the battery itself. Is it a new one or is it used for many flights.
So from all this I believe you have first a power problem and all other are follow up problems
For the last few days I have done the thorough checking to find the fault. Here is my observation:
There is no power loss, actually the receiver works on the 5V but when I checked the receiver end voltage (powered by 6C) it is coming around 4.5V to 4.7V, so due to that the low voltage warning comes in the transmitter.
I checked the voltage at GPS end, it shows the 4.9V and as per the manufacturer datasheet it can operate from 3.6v to 6v voltage (1.2W) so I don’t think that there is any problem in power supply.
There is no problem in mauch, it supplies the proper power to Pixhawk 6C but I think 6C only drops the output voltage due to load. I connected the same setup with cube orange and found out the receiver end voltage is coming 4.9V+
Now I seriously do not know what could be the reason of GPS glitch, I am guessing the problem with my Pixhawk 6C because last to last flight (flight before crash) I noticed the warning of BAD Gyro Health & BAD Accel Health for few seconds during flight and I guessed because of this it switched to RTL and landed (I earlier thought that it happened due to the receiver voltage low).
Now the 6C shows the “Arm Need Alt Estimates” even in the Althold mode and I am not able to arm it. (Does it point to the Barometer issue?)
And how do you guys do the ground test? I tried by switch the props (Clockwise props to anticlockwise motors and vice versa) so that drone will not generate the thrust and I can simply run the current load test. What mode do you guys try for ground test? I tried in Stabilize mode and noticed after some time the 2 motors starts running faster and 2 starts running slower and resulted in one ESC fused after running it at almost 90%+ throttle for 6 minutes (I checked the ground was level, even done the level calibration test before testing to make sure there is no roll or pitch tilt)
I really want to your opinion in few more things: Do I need to shield my GPS to Pixhawk connection wire and the pixhawk power wire (coming from mauch, this wire is coming with the same path of ESC power wires)?
Really looking forward to your opinions and thank you so much for your guidance.
4.5V on an otherwise idle 5V circuit sounds concerning. I stand by my premise that you are overstressing the autopilot’s voltage regulator and should power some of your peripherals more directly from the BEC.
Hello @scientist_bala I am also with @Yuri_Rage that all this don’ show that you don’t have a power problem.
How you measured the voltage on the receiver and the gps. Was it a single measurement or did you monitor it over your full test run. The most probably problem you have are some short power failure which will result in switch to failsafe or glitches.
I don’t know how much power your pixhawk can deliver to other devices.
Your testrun with the props running in wrong direction is a possibility to test the ESCs and Motors under load. but it is not thrust less. It has a full down thrust and is pressing your drone on the workbench. If it is now running in stabilize mode the controller tries to do this. Your drone will be not 100% leveled on the bench so the controller tries to press on one side more and on the other side less. But the drone is not following this commands as it is stable pressed to ground. Therefore the controller is commanding more power and that results in your observation. That the ESC will be fused after 6min full load shows that it is not the best solution. I always use in my usecases ESC which can permanently deliver more power than the max motor power.
Shielding of the gps dataline is not wrong but normally not necessary. The signal on this line is digital signal line with relative high power and not a small analog signal. So the glitches are most probably not by signal distortion on this line.
I recommend to power all external device with an own BEC which can minimum deliver 150% of the sum maximum powerconsuption of all connected devices. Make your testruns and monitor permanently the voltage of the pixhawk. Best is if you can monitor the 5V as well as the internal 3.xV
Likely backwards thinking. The GPS module is almost certainly the most power hungry component on your board unless you’re using a very powerful telemetry radio.