I have a F450 frame with a APM2.8 on there. The frame works quite well with the default PID’s, but of course i ran the auto-tune. The problem i have is not specifically related to the PID’s before and after the autotune.
The autotune did change the PID’s.
I’ve recently move the battery from the top mount, to the bottom because i think it’s better mounted there.
I feel that the drone is very unstable when going down. Especially when the battery is nearly flat, it looks like it’s going to fall out of the sky (this actually has happened to me from about 3m high)
My question is - are there specific PID settings that would make the descent more stable?
A rotorcraft will always be unstable while descending through its own prop/rotorwash.
This is called vortex ring state and has let to helicopter crashes. To avoid this, descend while flying forwards.
Aside from this, the rate PIDs seem to be a little bit low for a 450 size quad.
After several failed Autotune sessions with various copters and FCs, I always tune manually now. Autotune would sometimes adjust the rate PIDs so low, that the copter was uncontrollable afterwards.
Writing anything to the FC, except new waypoints while in flight is not a good idea.
There are many ways to enter bogus values by accident. Point and commas, leading zeros that get lost etc… I always land, enter new values, write and refresh them and take off again. That way I am sure the values arrived at the FC as I intended them to be.
So - i’ve finally gotten the chance to get to the field and test some things.
The CH6 knob tuning option works really well. Super easy to do!
However, i seem to struggle with the relation between the Stabilize Roll/Pitch P and the Rate Roll/Pitch P.
The documentation says that you would start with the Rate Roll/Pitch P. I’ve done the same and ended up on 1.4 or something like that. This is with Stabilize Roll/Pitch P at 4.6.
My question is more related to how the Stabilize Roll/Pitch P and the Rate Roll/Pitch P are related to each other. I can notice that they are related, but i don’t fully understand how.
Once i’ve done Rate Roll/Pitch P and raise Stabilize Roll/Pitch P, it seems the copter starts oscilating again. So should i then lower the Rate Roll/Pitch P?
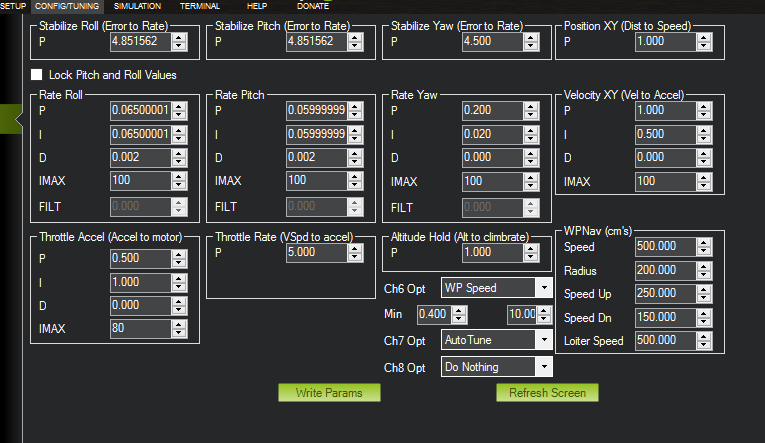
When i did the autotune, it ended up with Stabilize Roll/Pitch P at 4.75 or so and Rate Roll/Pitch P at around 0.65 which seemed too little.
Can somebody explain the relation between Stabilize Roll/Pitch P and Rate Roll/Pitch P?
Which one would you tune first? Is Stabilize Roll/Pitch P only for how quickly you want the copter to respond?
Then, i also have another question around loiter mode and tuning that. If i fly in loiter and go forward for around 30 meters, it picks up quite a bit of speed (i have that speed set to 2m/sec). Once i release the stick, it triest to stop (actively banks the other way). This reduces the speed quite a lot, but the copter still drifts quite a bit further. Is there a way to avoid this? Should i raise WPNAV_LOIT_MINA and WPNAV_LOIT_MAXA?