Hello, I am a Korean who is making the f-35b. Please understand that I do not speak English and use Google Translate.
I’m trying to hover as my first target with pixhawk4.
Transition flight is the second goal.
This is my first time using Ardupilot and I don’t know anything about it as it’s a beginner’s skill.
I’m studying hard, but I’m having a hard time setting parameters.
The problem is not seen even when I look for Q_TILT_ENABLE = “1”.
I am using plane ver 4.17
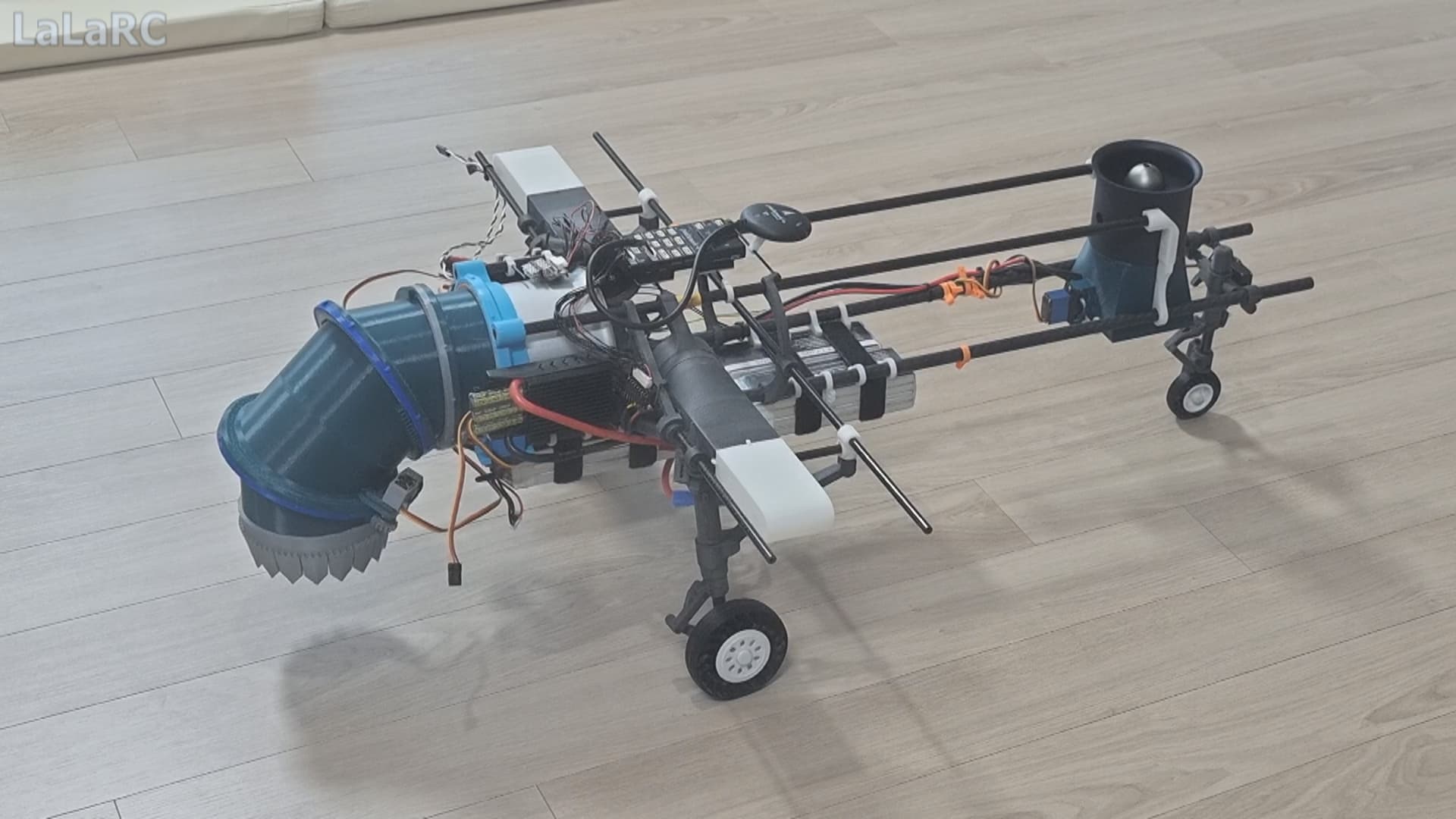
Features of the F-35B
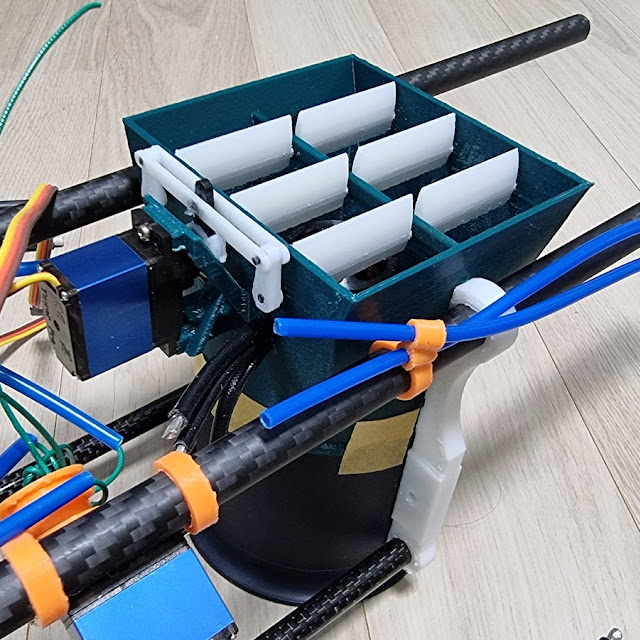
There are two tilt servos for roll and yaw.
The switching FBWA servo is separate.
I need expert advice.
This is the value I set. Since I am a beginner, there may be some mistakes.
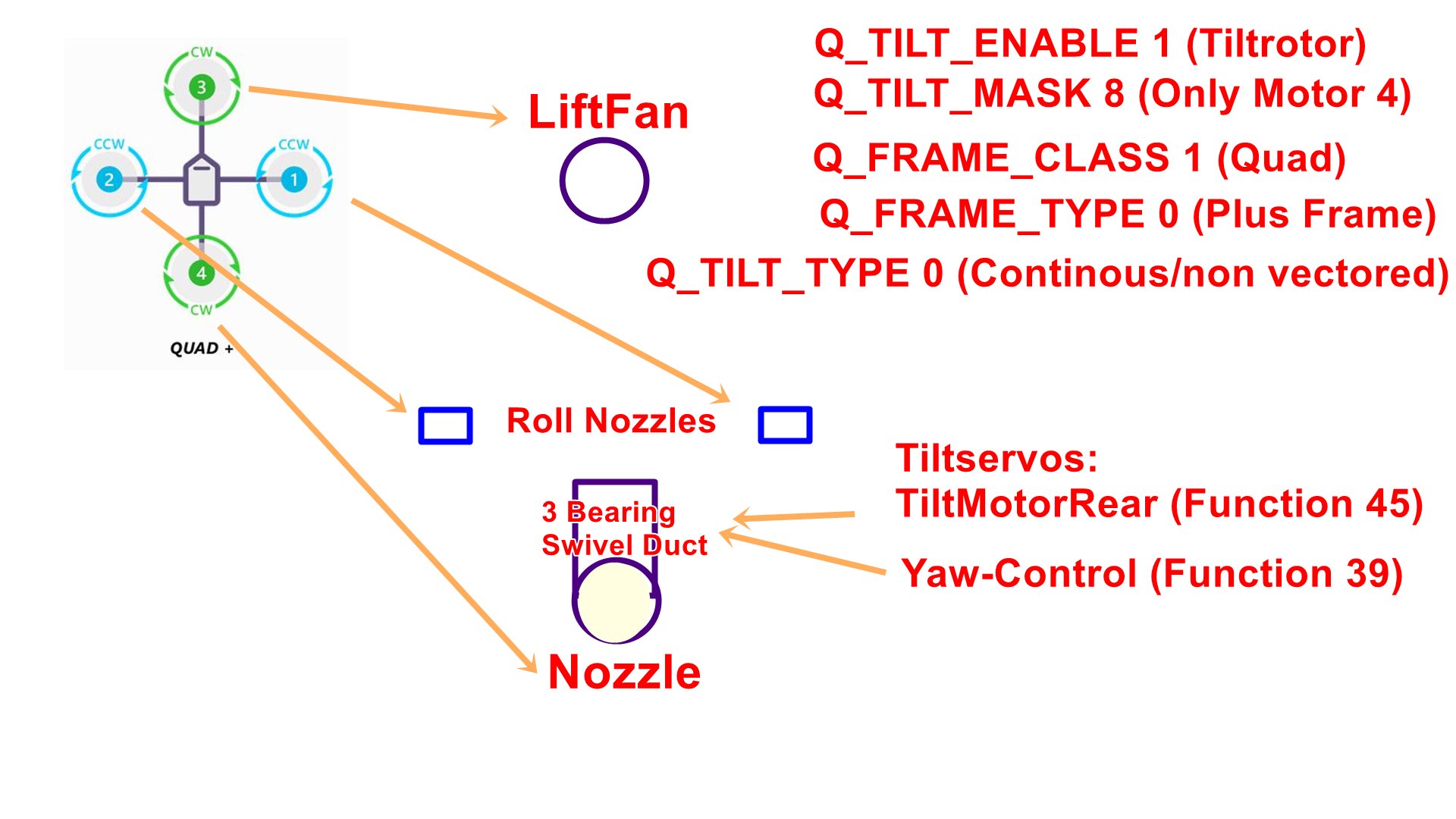
Q_ENABLE = 1 : Apply quad plane
Q_FRAME_CLASS = 1 : for quad
Q_FRAME_TYPE = 16: plus + frames, NYT , yaw torque is skip
Q_TILT_ENABLE = 1 : This is invisible. Q_TILT_FIX_GAIN = 1 ? Is this a replacement?
Q_TILT_TYPE = 1 :Binary
Q_TILT_MASK = 8: Tilts only motor #4. + frame
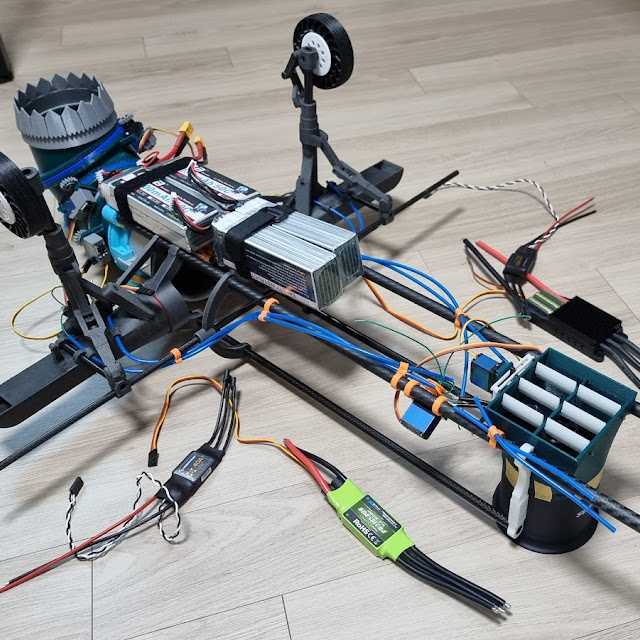
It was made because the thrust of the wing fan was weak.
*plane spec
front 70mm ducted fan thrust 2.7kg
rear 90mm ducted fan thrust vtol 4kg, fix wing 5.7kg
wing 40mm ducted fan x2 (left, right) thrust 200g
Front roll Servo (roll) It was made because the thrust of the wing fan was weak.
Rear roll Servo (roll + yaw)
Transition tilt 3 Servos (rear)
This video contains paid advertisements. If there is a problem, I will delete the link.