Hi,
I have spent the last couple of months building a X4 from scratch and took it to maiden flight last week. It’s rather big (18" props, 3,5kg take off weight) with a rigid full carbon fiber frame.
Everything worked fine on first flight (battery A) - I basically took it up and ran AutoTune on Roll Axis as first thing to ensure proper tuning.
Then during second flight (Battery B) I ran AutoTune on Pitch Axis - also worked very fine and completed as planned.After it was done with AutoTune I went into stabilize mode and I flew around to test for ~5 minutes very successfully, with no erratic behaviour (at least I did not notice anything).
When it was time to land (had reached calculated flight time) I engaged “land” briefly, then changed my mind and engaged “RTL” as it was too far off where I wanted it to land. Of course I could have flown “home” myself, but I wanted to give RTL a try… and this is where things went wrong.
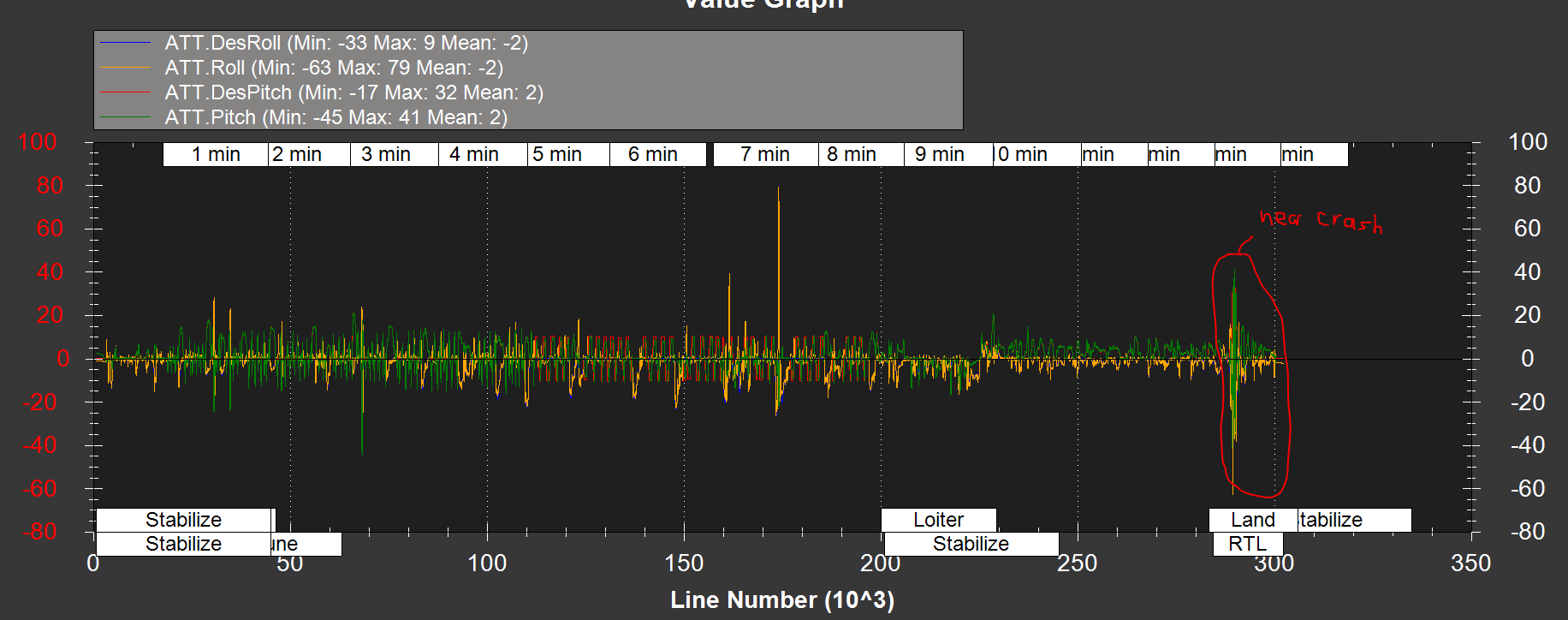
Maybe 10-20 seconds after engaging RTL the copter reached the home position, but instead of holding there for a moment and then descending as normal it started to oscilate really dramatically along roll & pitch axis. I mean really dramatically, to me it looked as if it exceeded 45° in angle. It did this for a few oscilations until I panicked (it looked as if it was going loose control imminantely) and threw back in “Stabilize” mode and was able to land safely manually.
I did a perfectly smooth third flight thereafter (Battery C) in stabilize mode for another 15 minutes with no issue whatsoever - so looks to me like an issue that only occurs when in autonavigation mode - I hardly dare to go into auto/rtl mode again because of this…
I tried to analyze the log and can clearly see the roll/pitch chaos just after minute 14 - but I don’t know what could have caused this erratic behaviour.
Could one of you maybe take a look at the log file and give me some hints as to where to look for the root cause?
Thanks so much,
Christian