My EKF params are
EK3_SRC1_POSXY,6
EK3_SRC1_VELXY,6
EK3_SRC1_POSZ,1 (use baro)
EK3_SRC1_VELZ,6
EK3_SRC1_YAW,6
When takeoff in Althold mode, drone can not control altitude.
In CTUN, AltHold seems to use the value from Visual Odometry, not the value from barometer.
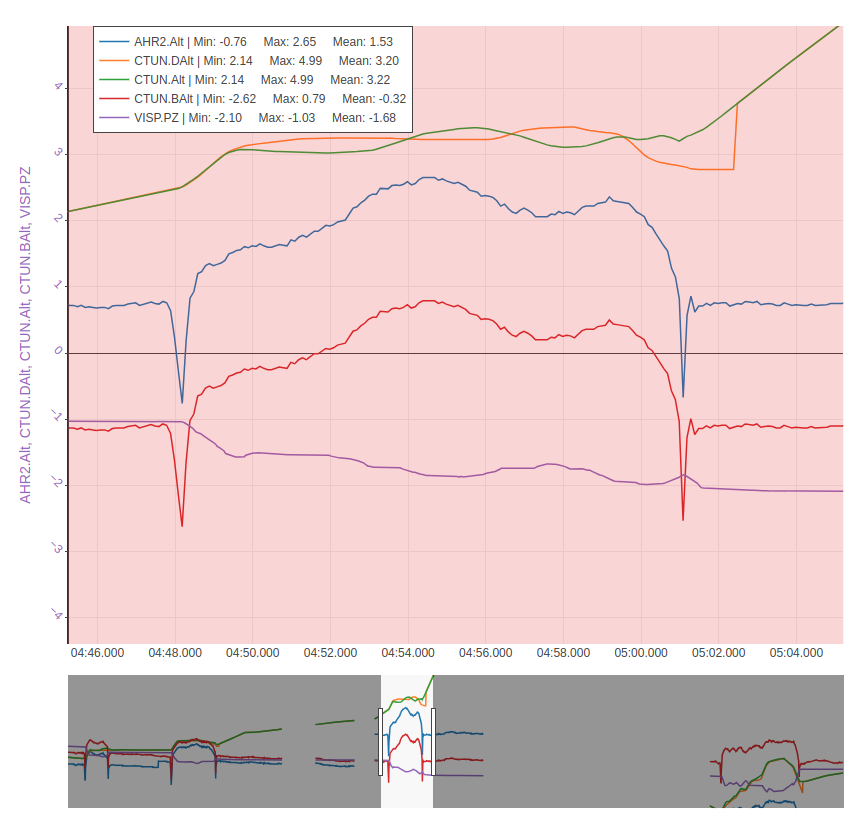
This is my log