Hi, I have an external LED board that runs from the telemetry port (Port2) on a Pixhawk 2.4.8 but the LED’s are not getting the info they need to signal change of status and low battery flashing yellow ? they worked in the old copter software but not 4.2, is there a parameter setting i need to update/change ?
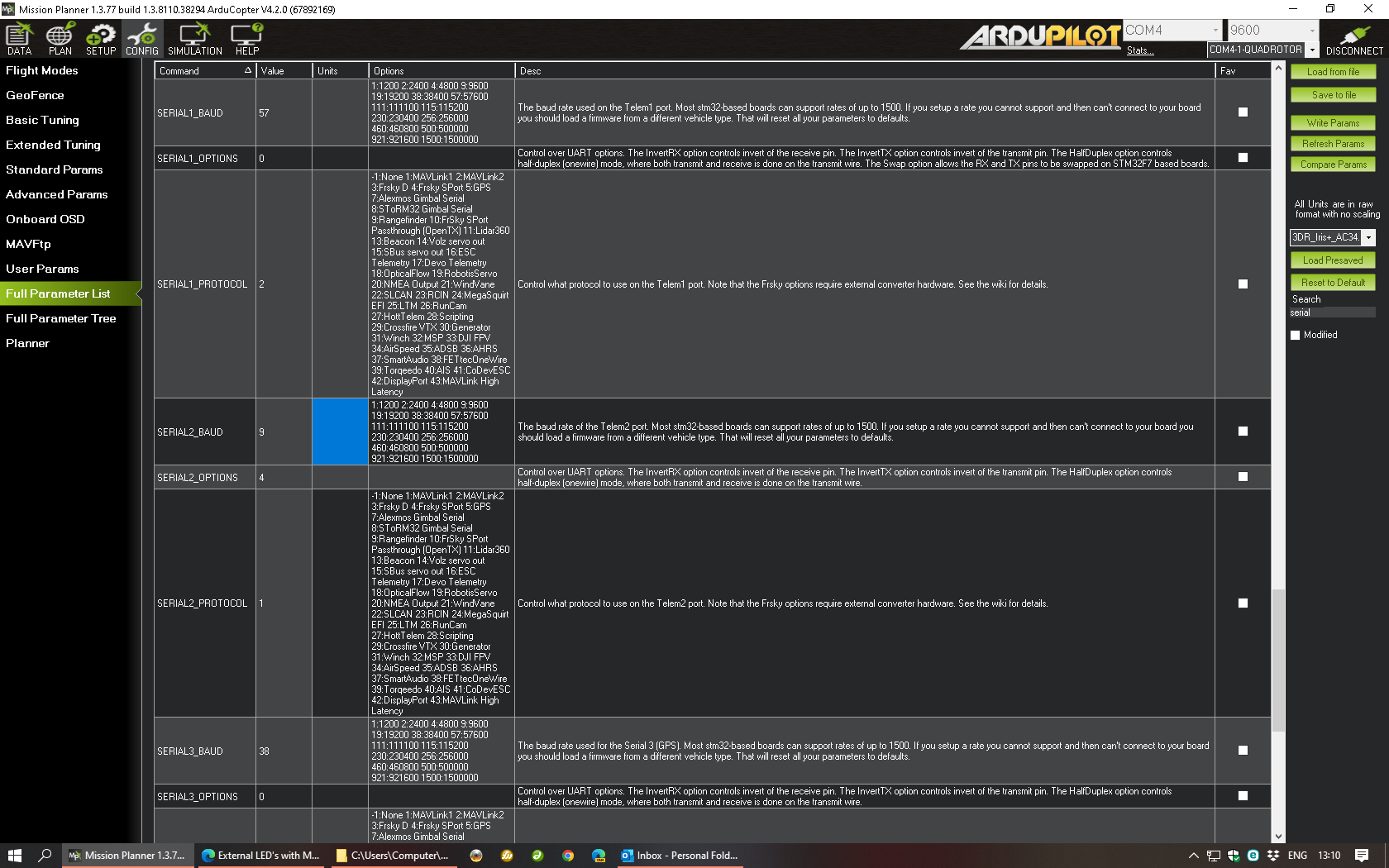
You will need to change the SR2_ Parameters to something other than zero so the data is sent automatically without being requested, I assume your running in half duplex mode with only a single tx wire from pixhawk to led controller. you might have to also set it to mavlink 1 mode by setting SERIAL2_PROTOCOL to 1.