What Flight Controller do you have? Out of curiosity are you also missing the SCR_ENABLE parameter?
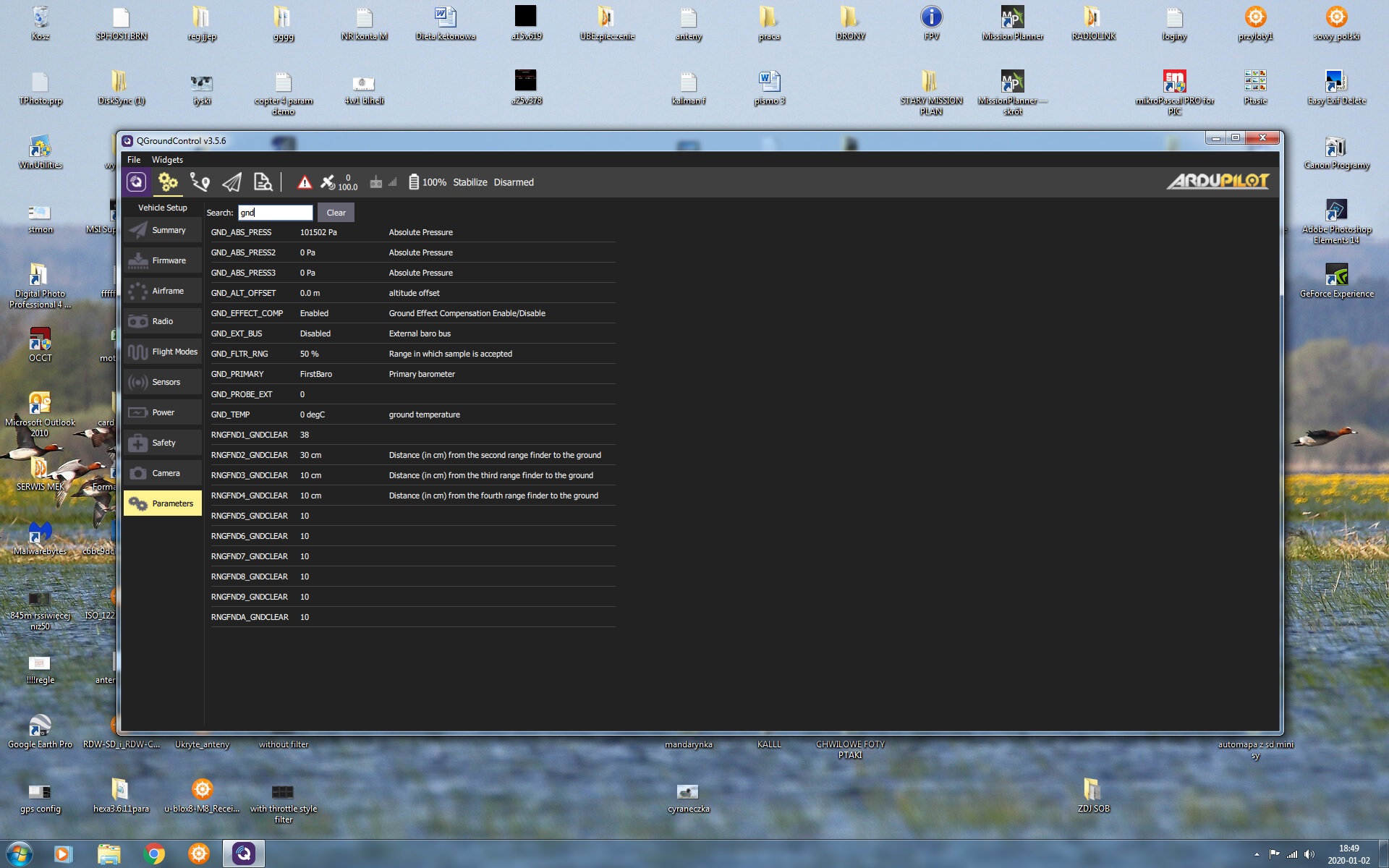
This controller is pixhawk 2.4.8. Hexa frame. I don’t have SCR_enable parameter but I have enabled gyro sampling after filtering to test. Does anyone have pixhawk 2.4.8 and state that they have the GND_Probe_EXT parameter?
Happy new year
This would seem to be an issue with your Pixhawk 2.4.8 being identified as having insufficient flash (1MB) for the features. IOW-fmuv2. I have a 2.4.8 on the bench and if I flash it from Mission Planner letting it select the firmware neither of these features are present (why I asked about SCR_ENABLE). Out of curiosity I flashed it manually using Load Custom Firmware using the Pixhawk 1 firmware and both features are present. The reason would seem to be this from the fmuv2 hwdef file: define HAL_MINIMIZE_FEATURES 1
Further investigation. I know for sure this 2.4.8 has 2MB flash (QGC will tell you) so using the “force bootloader” option and selecting fmuv3 and then updating the firmware to 4.0.0 did the trick. From then on it’s recognized as fmuv3 and MP will load that version of firmware automatically.
Note: This is a FC on the bench not in a flying craft so some comments about this would be helpful.
1 Like
Many thanks for exploring the topic. What is the pixhawk1 program that managed to upload the fmuv3 firmware? I would love to go the route shown. I think that afterwards the model will continue to fly …
From the Mission Planner Install Firmware screen select Force Bootloader and then after answering OK to the 1st dialog box select fmuv3 from the second dialog box that opens and then the Copter 4.0.0 OFFICIAL Icon. You should 1st make sure you actually have 2MB of flash. I think some of the earlier 2.4.8’s did not as the earlier 2.4.6’s didn’t.
1 Like
Yes, I agree with @dkemxr that the issue is probably that this particular Pixhawk 2.4.8 suffers from the 1MB flash limit so MP automatically loads the “v2” version of Copter-4.0.0 that is missing some features including the external baro.
I also agree with @dkemxr that it’s worth trying the fully featured firmware because it might actually work (i.e. the board might not actually suffer from the 1MB limit). After a quick discussion with Tridge he recommends using the Pixhawk1 firmware instead of “fmuv3” because the Pixhawk1 firmware is slightly smaller because we know better which sensors are on a Pixhawk1
By the way, Copter-3.6.x was small enough that the full featured firmware (aka fmuv3) would actually fit within the 1MB limit but Copter-4.0.x will not.
Sorry if this is all a bit complicated to understand.
bootloader upgrade fails in any way. However, I managed to upload pixhawk 1 firmware via QGC. I already have the GND_PROBE_EXT parameter. Thank you so much for help
1 Like
Using qgc I was able to also upload the fmuv3 version. unfortunately, despite the fact that I have already lost parameters, the bmp280 sensor does not work. I recently connected it to the arducopter 3.7.0 on the kakute f7 and it worked properly. I wonder if somehow the bmp280 or soft has not been damaged it does not support. I will buy ms 5611 …
I have a Pixhawk 2.4.8 that has 2MB flash, but is recognised as a fmuv2, so I am trying to update the bootloader according to @dkemxr’s instructions, but without success … ![]()
This is the first dialog box that I get:
Unfortunately, I don’t get a second dialog box that opens … MP just stays at the main “Install Firmware” screen.
I am using Mission Planner v1.3.70. Could you please suggest what I am doing wrong?
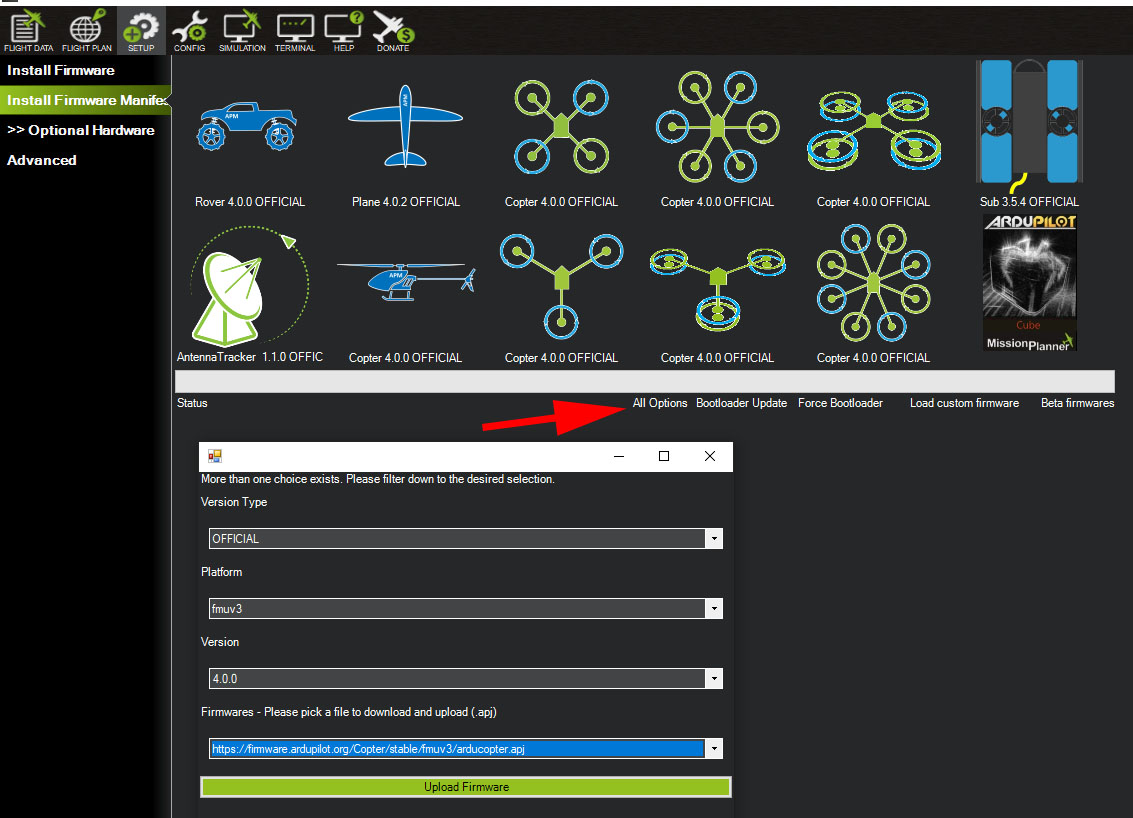
Try this. From the Install Firmware Manifest screen select All Options which will open the attached dialog. Select as shown:
1 Like
Thanks Dave … success at last … 
Although I had to update Mission Planner to the latest beta version in order to see the “All Options” option. Which may also explain why I couldn’t see the second window that you referred to in the initial instructions?
Yes, probably so. MP Beta is updated so often I’m in the habit of updating every few days as it get’s caught up with Ardupilot.
1 Like
Hello everybody
I am new to this forum and have recognized your posts as very useful.
Maybe you can help me. I have the ext barometer
-Adafruit mprls sensor- to connect to my Pixhawk. Which sensor do I have to choose under MP or is the sensor automatically recognized because it is connected via i2c?
Thank you
I don’t think that sensor is supported and I wouldn’t call it a “barometer”. The pressure range is much too large. From Adafruit you want the BMP280 board.
Thank you for your prompt reply. I will order the bmp 280. Do you encapsulate the barometer or is it enough if it is mounted “below deck”.
Thank you
Hello another question.
I have now found the SPL06 sensor that should be even more precise than BMP 280 or BMP 388. What do you think of him or does anyone have any experience with it.
Thank you
That’s not supported either. Either a MS5611 or the BMP280.
You will need to place a piece of open cell foam over the barometer sensor.
Thank you for your patience!
Which on would you recommend for l2c.
Thank you
I advise you to buy ms5611 some time ago I tried to connect to pixhawk 2.4.8 bmp280 as the second one but it didn’t work on AC 4.0 version. So I installed ms5611 on i2c (the same as in the controller) and it works great.
Thank you so much i will let you know how it works. I have to order.
Greetings from Italy
Gesendet von Mail für Windows 10
