Thanks very much for the information - good to know.
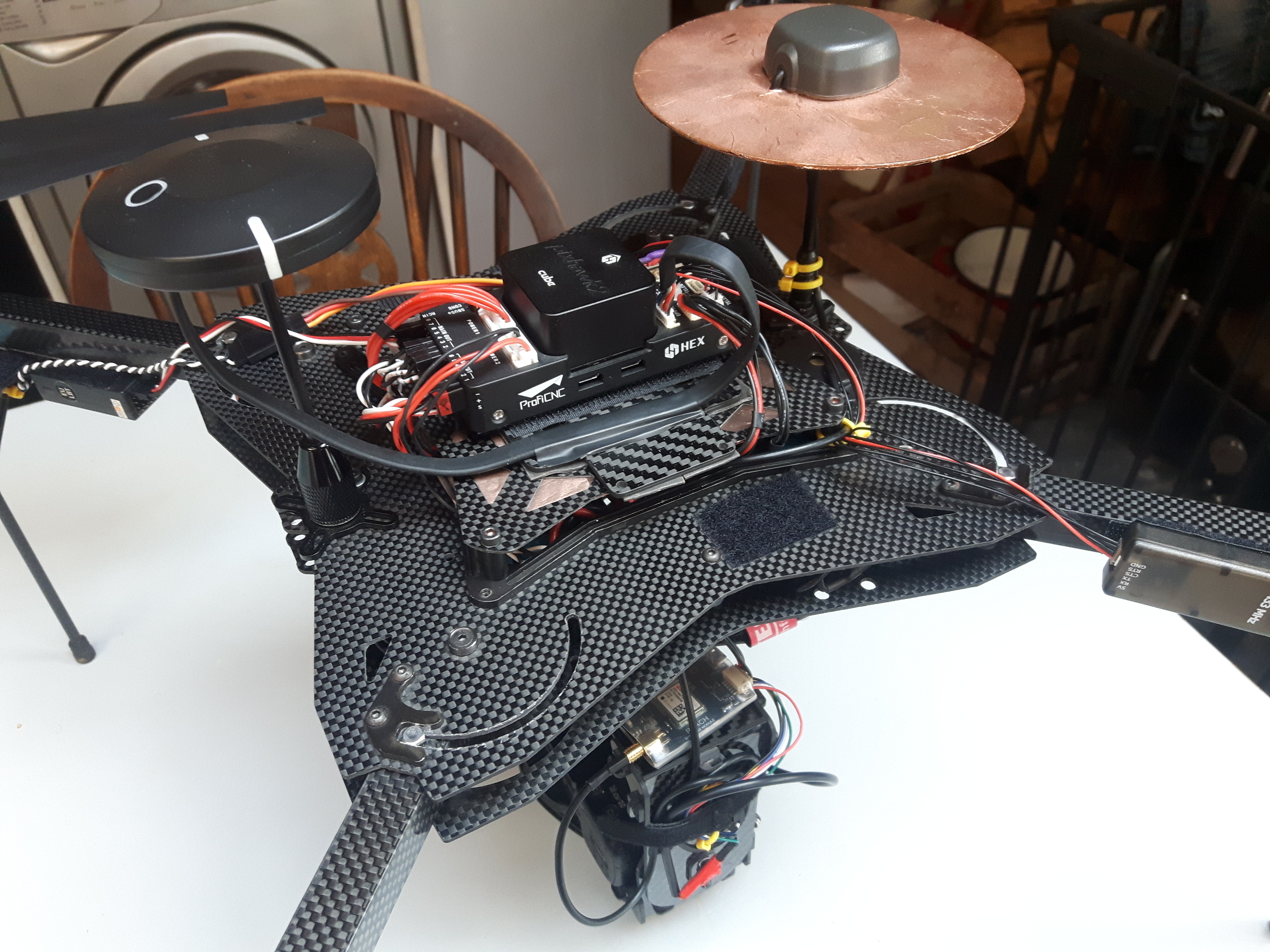
There is nothing exotic about the machine, it is a folding quad in 15" triple blade props, carrying an A6000 on a single axis servo gimbal. Foxtech hover 1 frame. The FC has been mounted in a few different places - the frame has a damped plate from which the battery hangs, where the FC can be mounted, but as expected, with the large mass of battery and camera attached it caused all sorts of issues in flight. So the Cube is now mounted to the top plate.
I have tried hard mounted with VHB tape, various foam isolators, and with the top plate direct mounted to the rest of the frame, and installed on standoffs as in the picture below. I have now added a bit of stiffening to the top plate, and mounted the cube with velcro for convenience for now. This is giving me my best results so far. Please excuse the untidy build, it is not final

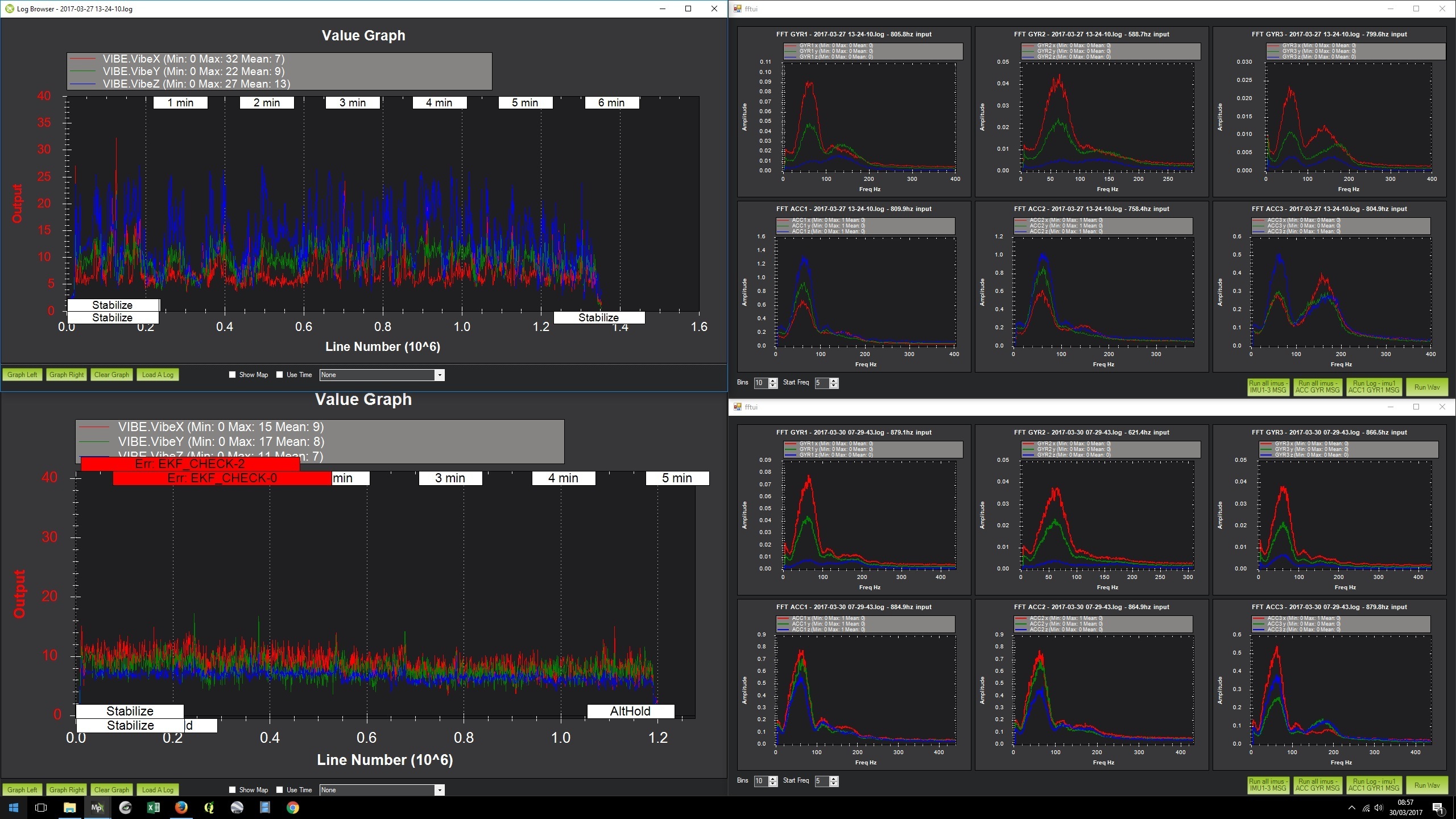
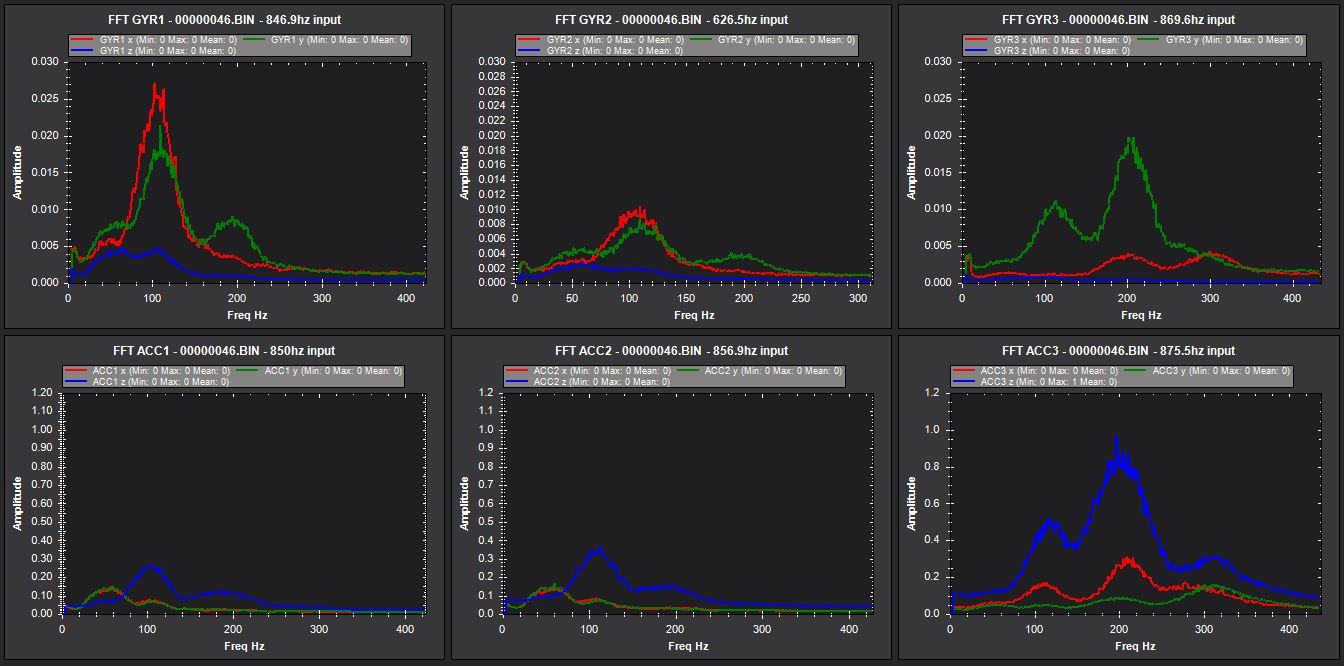
Here is an FFT from a 2 minute hover in pos hold this morning, no wind
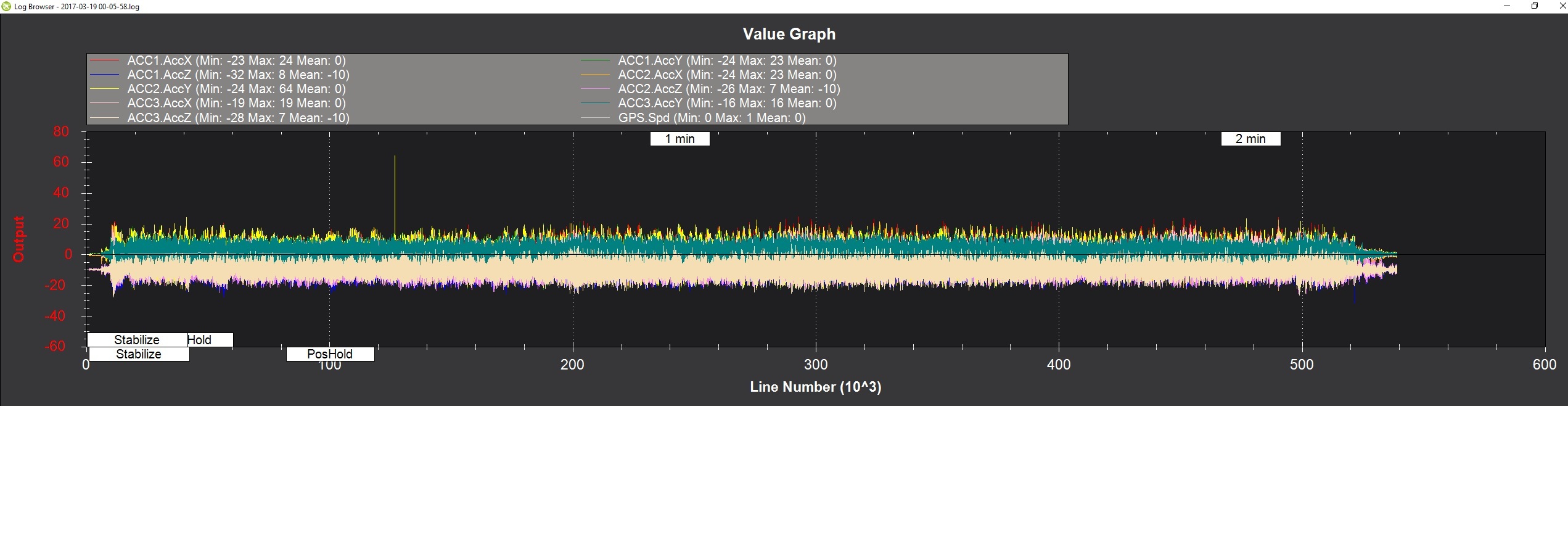
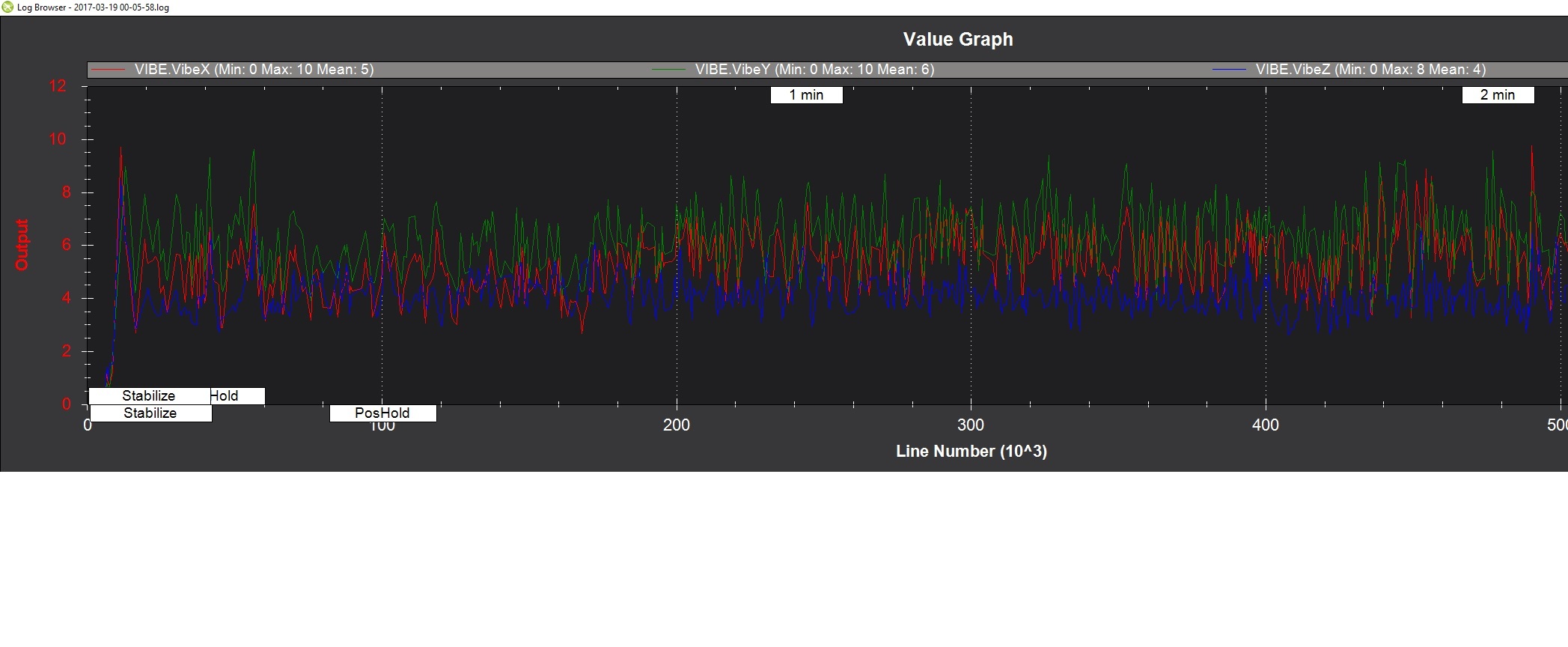
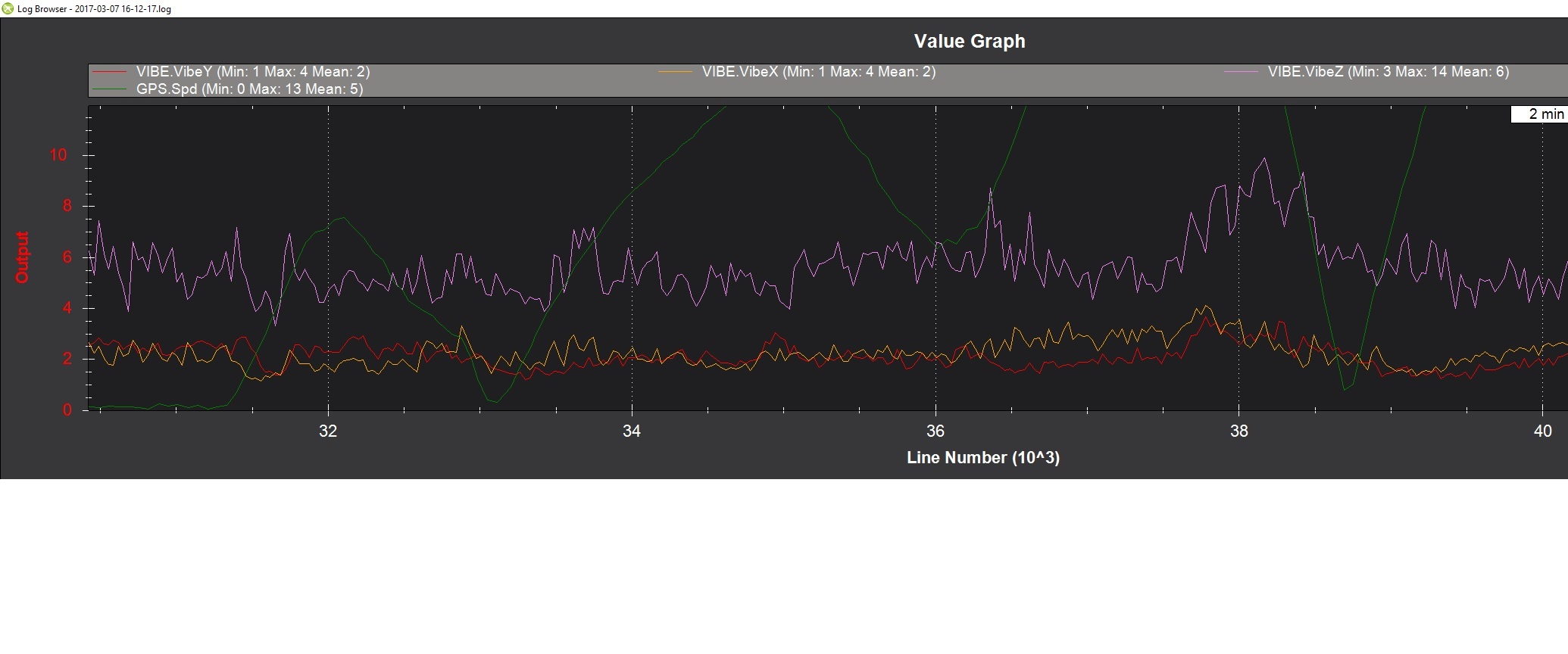
And here are the accelerometers:
link to the logfile from that flight here:
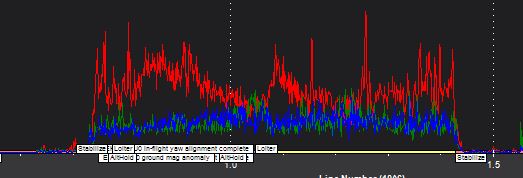
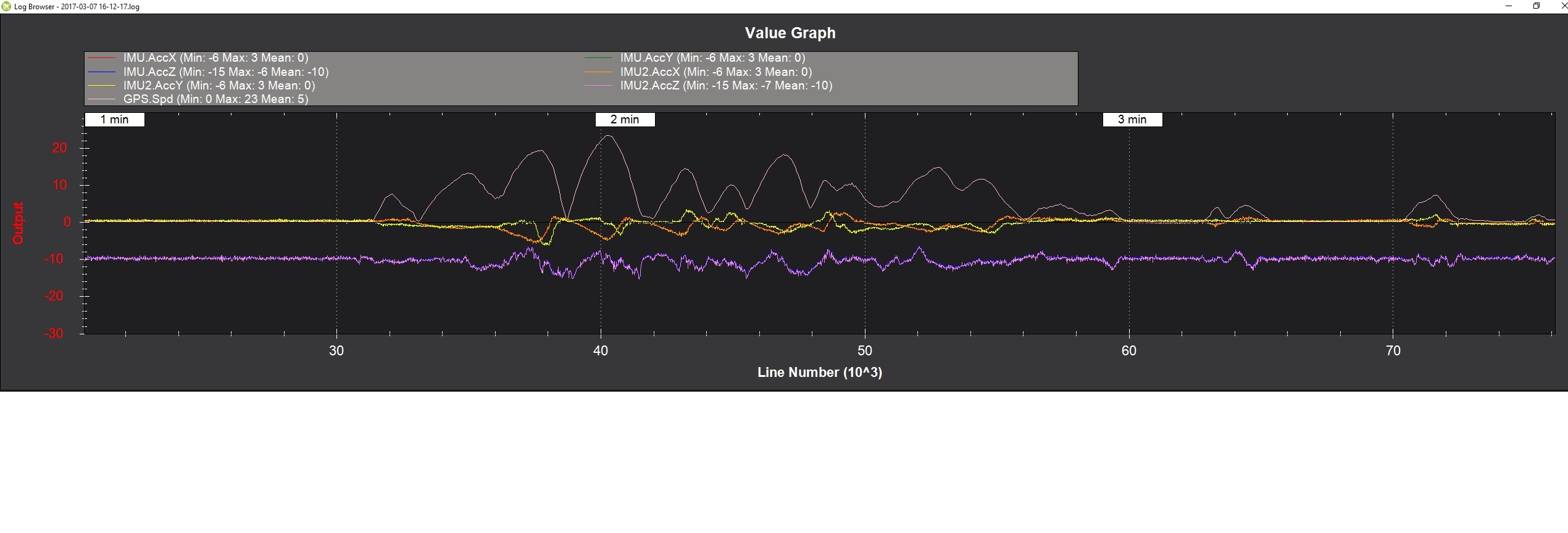
What I’m aiming for is more like this, from a 550 x8 on 10" props with a 3dr pixhawk, note the peak vibrations are at around 50 mph…
I’ll try further stiffening the FC plate, might try some more isolation as well, but as you say the higher cog of the cube + carrier does bear consideration.
I would really like to get the accelerometer noise down to a minimum, this seems the key to getting good performance in pos hold or auto in windy/turbulent conditions. I guess cutting the vibes in half from where they are now should do it.
I may be barking up the wrong tree though, so very grateful for any thoughts on the above.
Cheers,

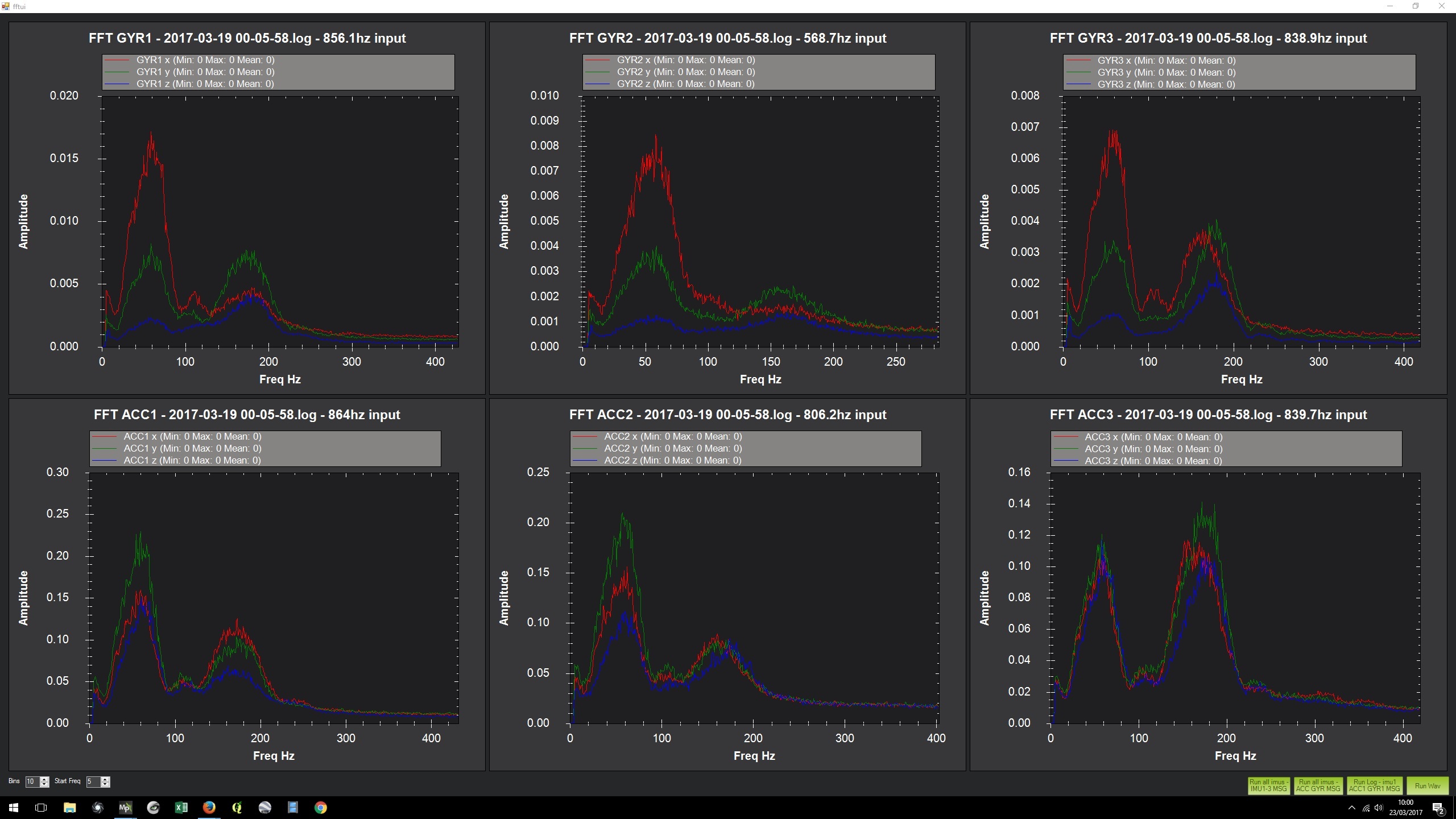
 ctrl-f in mission planner brings up the FFT button. AFAIK there is no documentation for this feature, though there is stuff in the forums.
ctrl-f in mission planner brings up the FFT button. AFAIK there is no documentation for this feature, though there is stuff in the forums.