I want comments and opinion of expert members of this forum on my Quadcopter Tuning.
Frame: Quad 1300mm Arm to Arm
Prop: 29x9.5 CF T motors
Motors: U8Pro KV170 T motors
ESC: Air40A T motors
MTOW: 7.6kg
I followed the procedures listed on wiki section for basic setup and tuning . Even configured the harmonic notch filter and performed manual tuning.
Pl comment on how do you rate the tuning of this aircraft. My observation was it flew very well on windless conditions but on high winds performance was not good. What you suggest for better performance in high winds?
hi @Aorish_Imtiaz
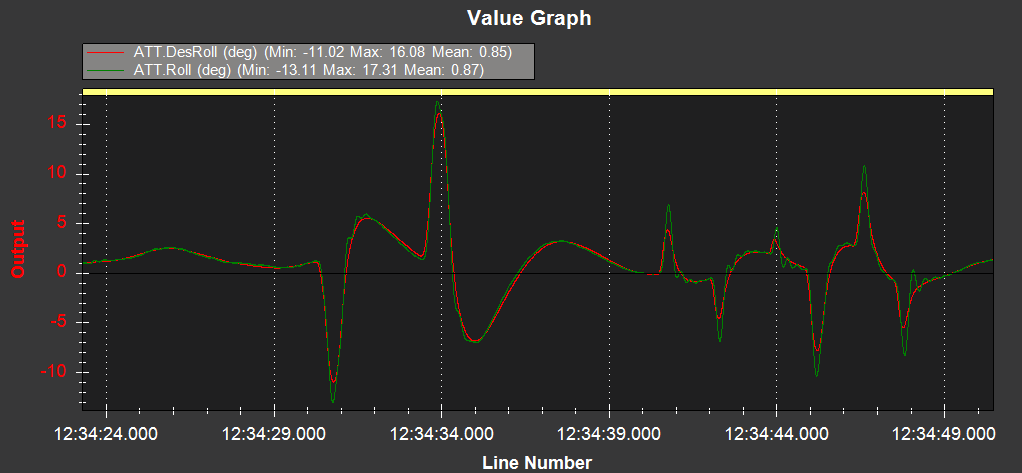
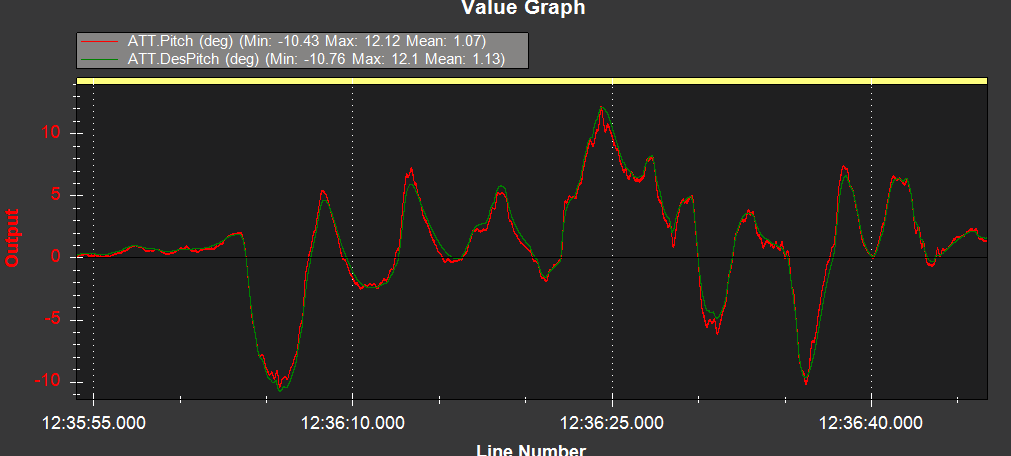
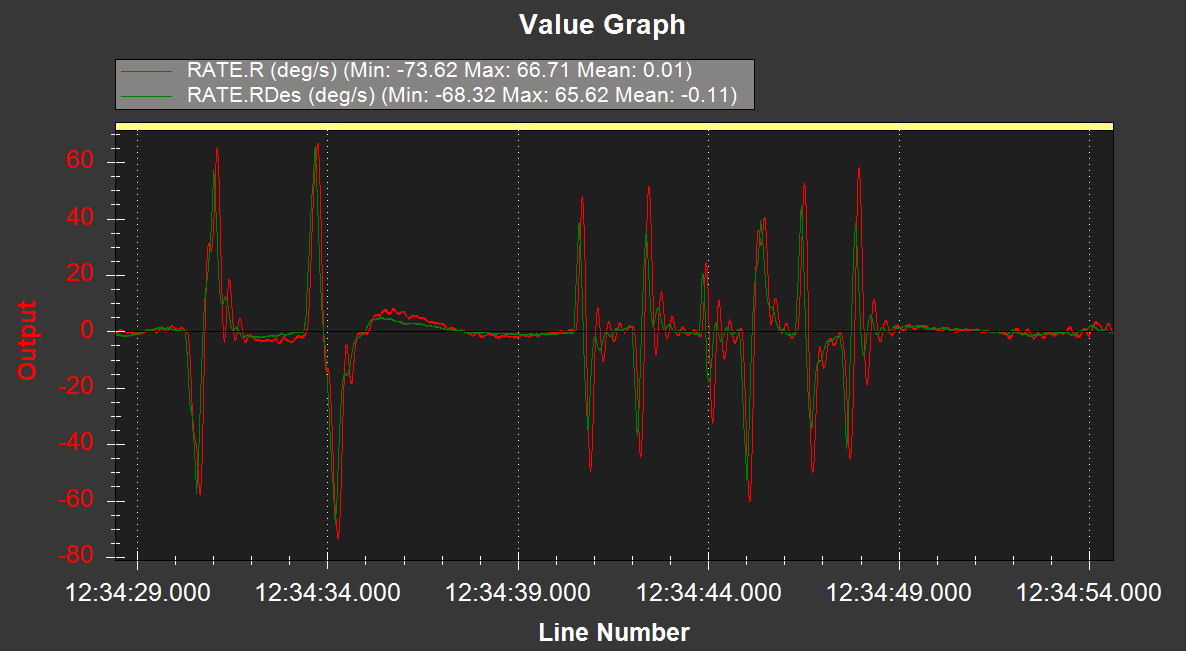
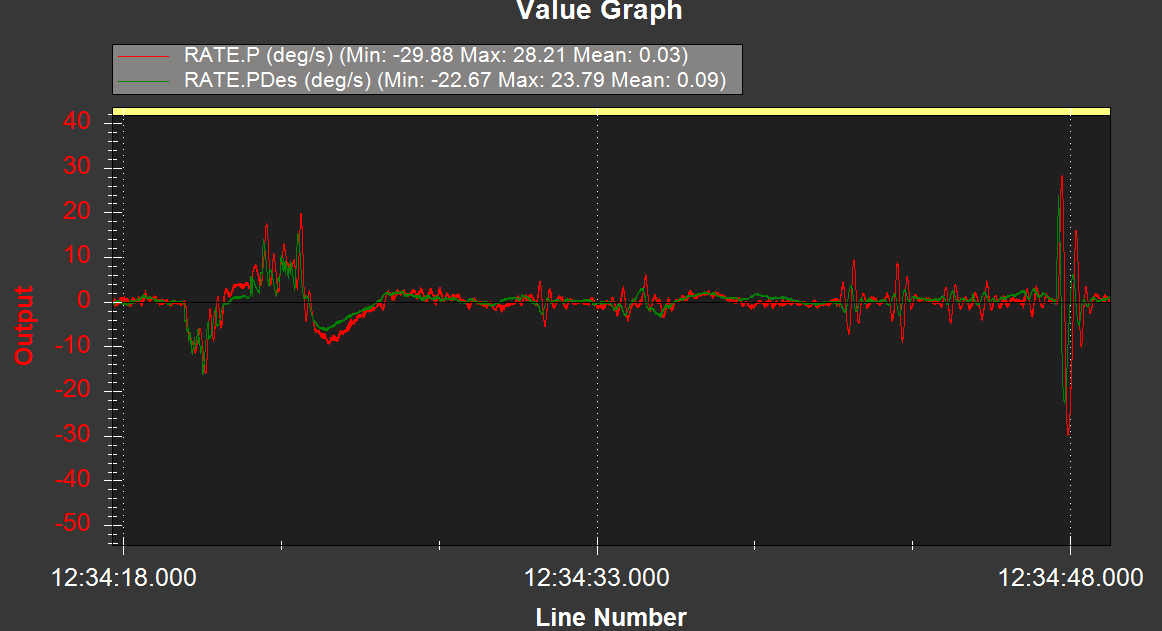
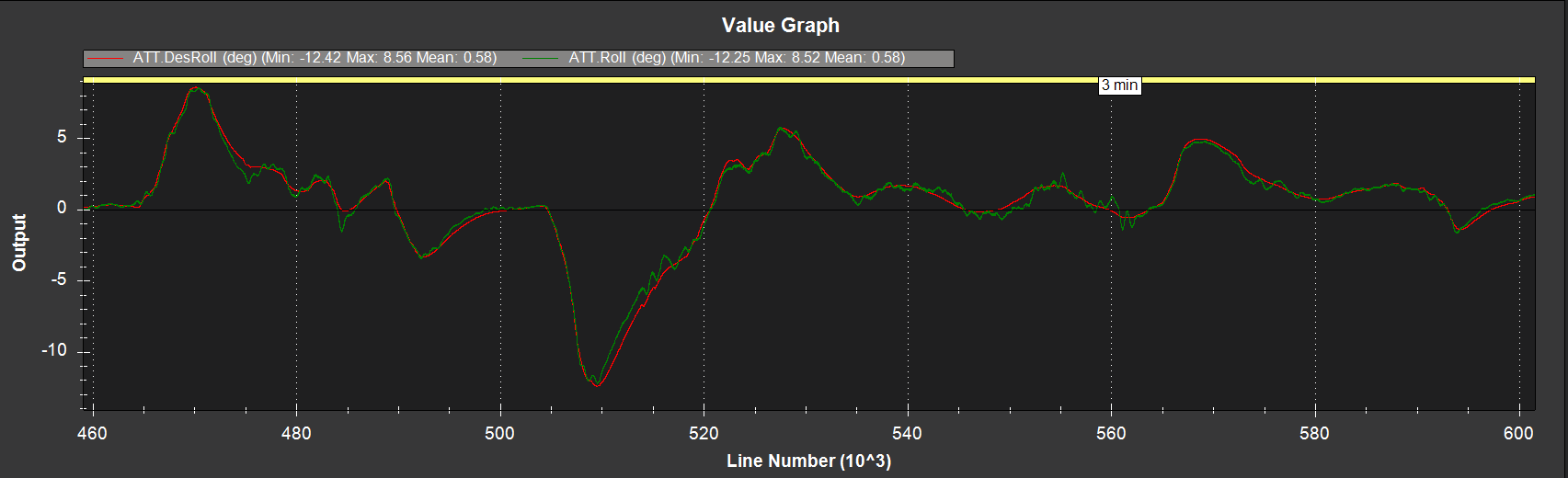
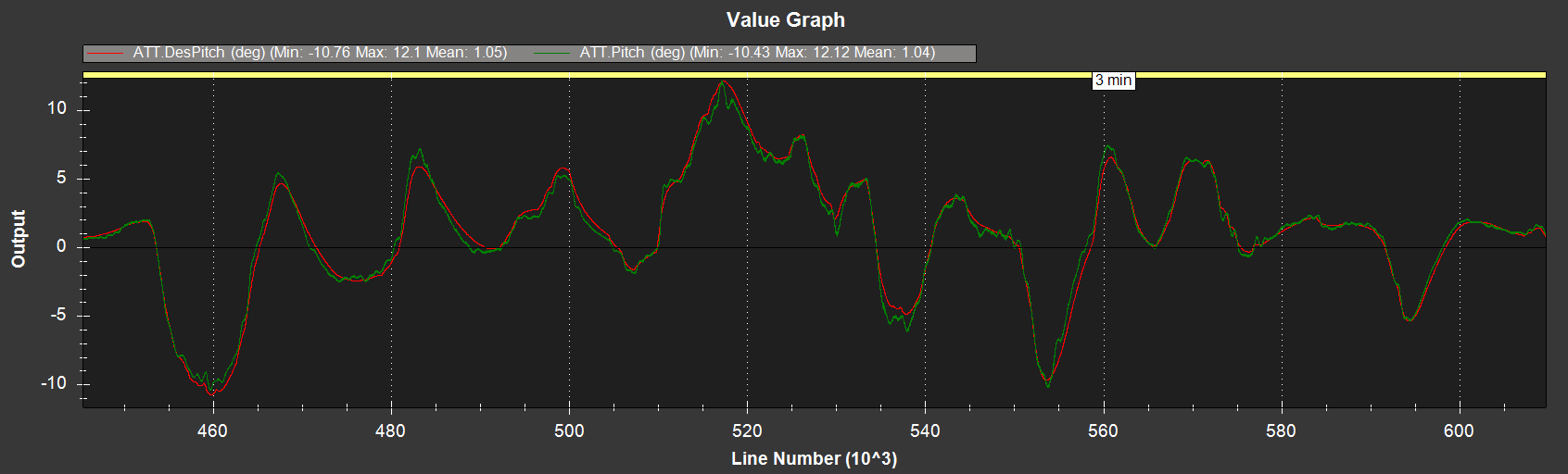
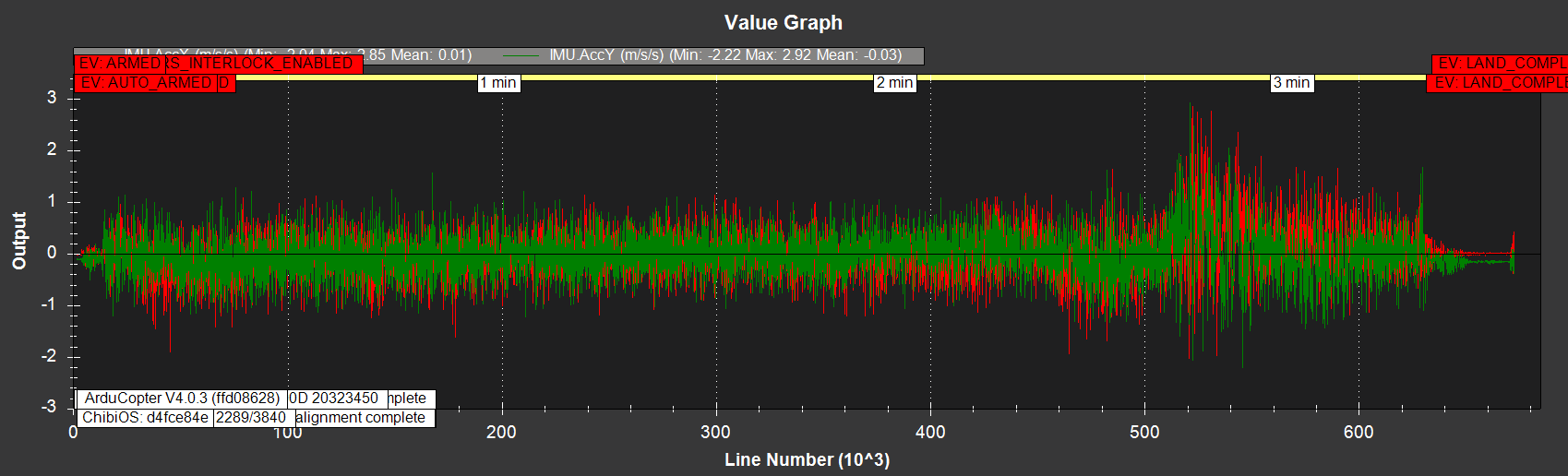
looking at ATT values it shows that you still have noise problem even with configured harmonic notch filtering
also you can see oscillation when copter tries to stabilize it self after movement
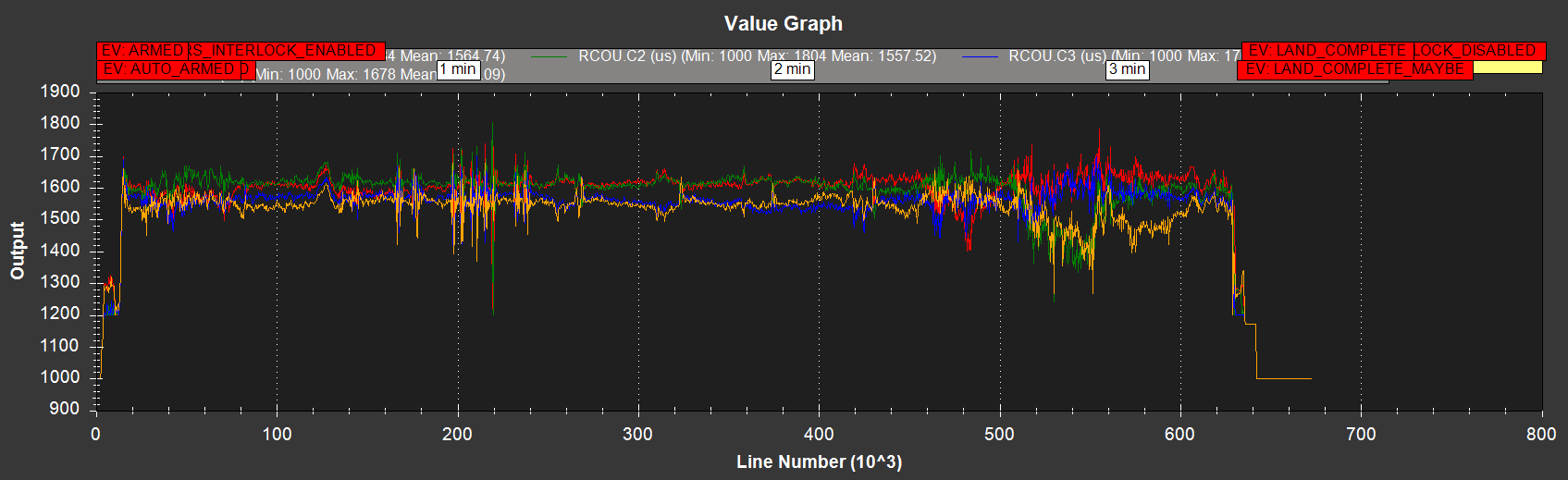
and there is motor unbalance in log, but its not because of bad physically balance
CCW motors are working harder and i was faced this problem with high noise on accelerometer
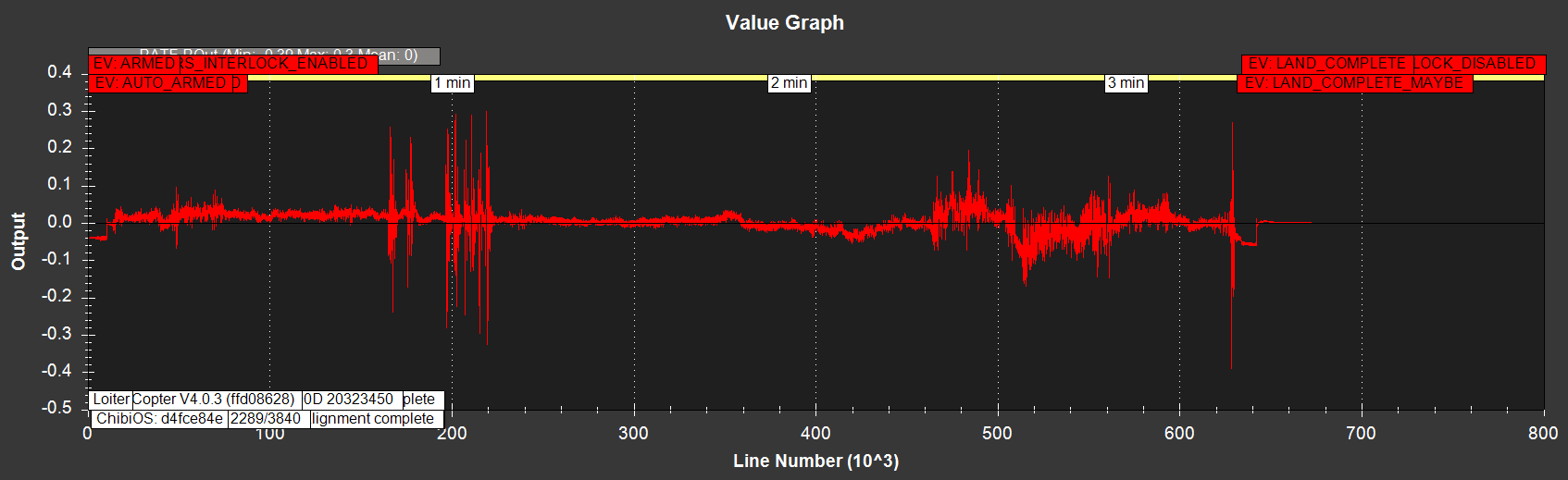
Current monitoring is not working correctly, it will be useful to fix that.
There is that motor alignment to sort out too…
There are some other slightly odd parameters there and I would probably change:
ATC_THR_MIX_MAN,0.5
ATC_RAT_PIT_FLTD,8.5
ATC_RAT_PIT_FLTT,8.5
ATC_RAT_RLL_FLTD,8.5
ATC_RAT_RLL_FLTT,8.5
ATC_RAT_YAW_FLTT,8.5
INS_ACCEL_FILTER,17
INS_GYRO_FILTER,17
MOT_THST_EXPO,0.8
PSC_ACCZ_I,0.4852
PSC_ACCZ_P,0.2426
BATT_FS_LOW_ACT,2
BATT_FS_CRT_ACT,1
Also how did you come up with ATC_THR_MIX_MAX,1.5 ?
It would normally be 0.5 too. I’m curious about that one.
PIDs look a little odd to me, but that could just me. Did you derive them manually or by Autotune?
I would have expected something closer to this:
ATC_RAT_PIT_P,0.15
ATC_RAT_PIT_I,0.15
ATC_RAT_PIT_D,0.005
ATC_RAT_RLL_P,0.15
ATC_RAT_RLL_I,0.15
ATC_RAT_RLL_D,0.005
But I am genuinely curious and not saying yours are wrong. Every craft will be different, and yours has a rather big wheelbase for a Quad and big motors and props. If you were to change any of those things, be especially cautious of the PIDs since your craft is actually flying.
Probably do more autotunes…
Wind might always be a problem with props that size too.
Thanks for your suggestions. I will incorporate them and then fly and post the log
Regarding current sensor Im incorporating mauch sensor and soon it will be working.
Can you explain motor alignment case in detail?
Regarding ATC_THR_MIX_MAX I read somewhere it help keeps big copters attitude in control while descending so I increased its value!
PIDs were derived manually! On lesser winds the copter flies very good. By looking at the log file how do you rate my tuning effort? What should be done to have better wind resistance?
If you actually read the notch filter documentation you will discover the notch does nothing to the ACC noise. The notch cleans up the gyro signals which drive the PID controllers…
i think you did not read whole thread
first i suggested these motor dampers that i used them without any problem
then i suggested silicon under motors that could solve problem but aligning motors are a little bit hard but not impossible !
i used soft silicon on s550 and daya 550 frames and result was perfect
other users also tried this with success
but foe mine it was took 4hrs to completely align motors by screws