
A little fun helicopter for FPV: the Protos380Light
given the limited room onboard and already lots of wires going around I decided to not install an RPM sensor and instead explore the possibility of using RPM signal from the ESC using a BLHeli ESC and the really handy telemetry function.
Board used for the project is Matek 405WMN, Matek GPS M8Q, ESC is a an AIrbot Wraith65A I had laying around and the rest came as a combo kit from XLPower.
FC is using DSHOT to control the ESC and telem wire connected to Rx3 port.
The FPV equipment is a DJI air unit with wtf-osd mod (https://fpv.wtf/).
The really nice thing, beside having the governor work with rpm signal from the ESC, is the ESC current and temperature displayed on OSD.
Video of test flight(tuning still ongoing…) Protos380_FPV_Acro_ArduCopter - YouTube
some loiter Protos380 ArduCopter Loiter - YouTube
@heri Hi Heri,
little more details, this is the wiring diagram for the ESC:
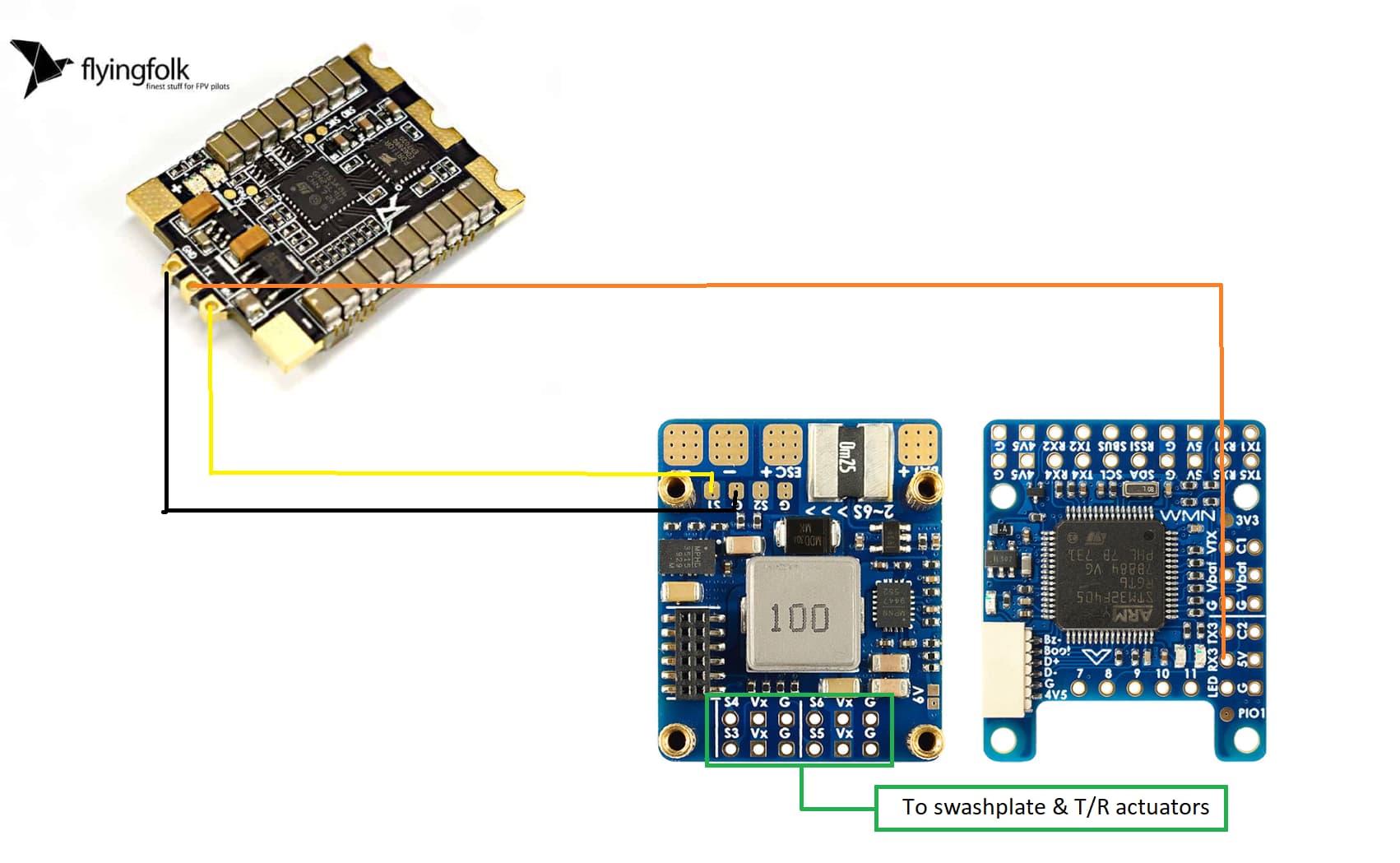
For the telemetry to work DSHOT protocol has to be used. This works differently from normal PWM signals, so all outputs under the same timer (in this case S1 and S2 will be under the same timer) will be set to DSHOT. In other words, you will not be able to connect a normal servo on output 2. So for the swashplate and tail rotor I have used the remaining output slots on the servo rail (S3->S6).
Regarding the DSHOT setup and ESC telemetry at FC level is straightforward to follow the arducopter documentation.
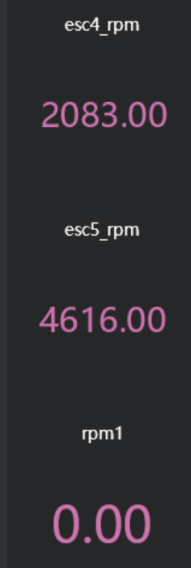
Once enabled you will have access to ESC voltage, current consumption, RPM and temperature. All nice details that increase situational awareness for the FPV pilot.
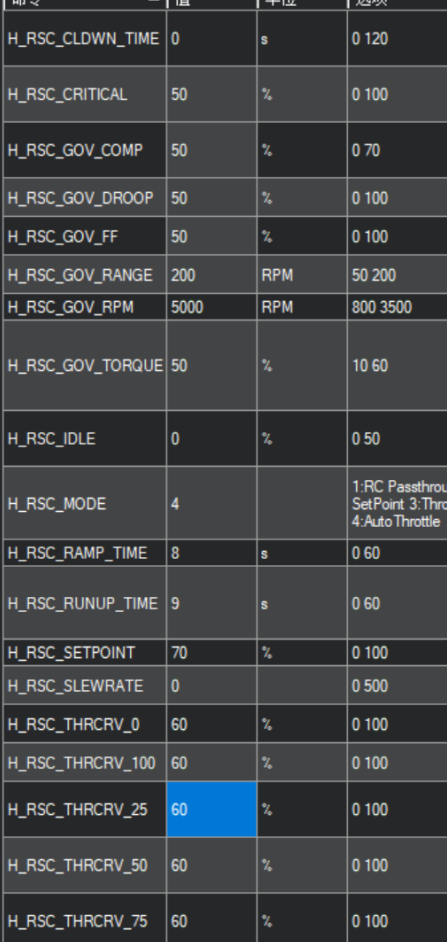
Then setting RPM input as ESC telemetry allows the use of ArduCopter internal governor to maintain constant motor speed.
On a little frame like this there are weight-saving advantages using this setup, the ESC weighs half of an Hobbywing of same capacity and you can spare the magnetic rpm sensor, mounting and wiring.
Furthermore I was interested to see how this setup worked out, thinking of a twin-engine helicopter setup for example: the additional telemetry info could be used for torque/speed matching logic in the drivetrain.
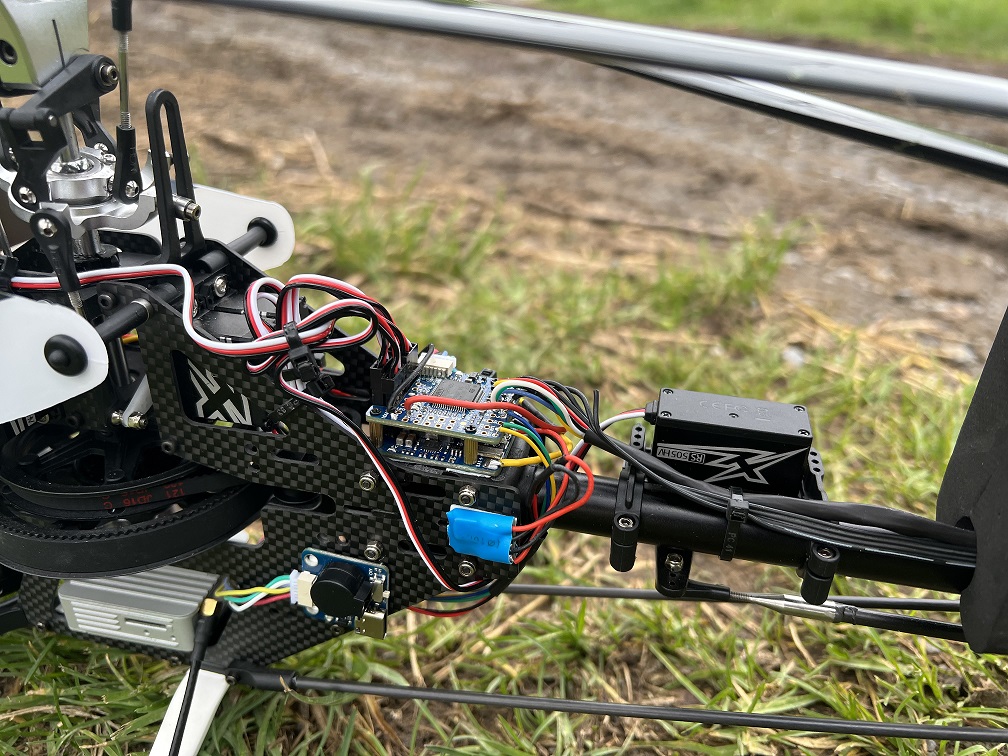
Some additional pictures:



thank you for the informations. Pleas keep me/us informed about the progress of your experiment. First of all, about the components and the configuration/parameters of these. Maybe i will try it myself.
BR
Heri
just one question for my understanding: Are there also bigger ESCs on the market, e.g. 12S/80A ? Just in case I want to use this in my big scale helis for example.
BR
Heri
Hi @heri
Yes, indeed the next step I’m planning is to integrate an APD 80A on my 600 test platform.
They have a wide selection of ESC:
I used D-shot ESC, but GOV did not work. When I touch the motor with my hand and give it rotational resistance, there is no GoV compensation for the throttle output.
The solution to this has been answered on Discord Trad-Heli channel. Anyway, for clarity, copying it over here too: RPM1_TYPE needs to be set to “5” so ESC telem as input is used for rpm sensor and then RPM1_ESC_MASK needs to be set according to which output the ESC is phisically connected to the board. Some smaller racing/FPV boards might not have the RPM library included in the default FW available in MP, so the custom FW compiler can be used https://custom.ardupilot.org/
Hi @heri , follow this road ![]() ArduPilot Discord Server — Dev documentation
ArduPilot Discord Server — Dev documentation