many thx for the info. So I’ll wait and see ![]()
A pending PR includes lua scripting support, including a web server. Web server features:
- faster log download
- server side scripting (embedding lua expressions in html, much like PHP)
- cgi-bin support with lua scripts
3 Likes
@tridge any chance to fast download dataflash logs via Ethernet so we can upload them to the cloud?
yes, I can get 2 MByte/s log download already, I suspect with some more work 3 MByte/s is doable
2 Likes
Tested out the BotBlox SwitchBlox mini with custom made cables to HereLink, Pixhawk 6x and CM4 module. “Just works” after setting IP addresses.
Not sure if I set things up correctly though. I had DHCP enabled and it pulled an address. However I had to manually set NET_P1 address/port manually. Is this normal and expected? Also Mission Planner didn’t detect MAVLINK stream on 14550 automatically but did see the stream from HereLink controller over WiFi. It did connect manually though.
Does this option work like a normal IP multicast, where there’s a source IP and multicast IP/port? Should we be using 224.0.0.0/4 subnet for the multicast streams?
Also any plans on IPv6 support? Here in the US most mobile networks are IPv6 primary with non-public IPv4 unless you buy a static IP.
This video explains how to setup PPP support with ArduPilot, so you can get full IP networking on flight controllers that don’t have an ethernet port:

2 Likes
yes, that is normal. The DHCP sets your boards IP address, but it can’t know what you want to connect to
if you want to do multicast, then yes. Multicast is great for swarming. For single aircraft a UDP unicast is a better choice.
not at the moment, I expect for those wanting IPv6 will gateway via their GCS laptop
1 Like
This is wonderful. One question - is there any reason not to run the web server on the AP on port 80?
I’d suggest looking at a VPN @ReadyKilowatt - you will want security anyway and most VPN software like Tailscale (my favorite) or Zerotier, etc. will give you secure virtual IP4 network.
You might need to do some routing on the Pi to get traffic from the ppp link to the VPN and back.
1 Like
Log file download speed compare. Is it a valid compare.
I think have to increase the USB or USB to serial speed for a valid compare.
So, should try change it to 12.5Mbps to serial 0 and compare it again. Provided MP interface support it.
I hope to see the Telemetry Radio manufacturer to incorporate this.
this is very cool, it would be nice if it could run on something smaller than a pi like esp32.
the baudrate is not used on USB - the speed does not vary at all by changing baudrate as USB is packet oriented
@tridge Having PPP networking looks really promising.
Is it possible to use the PPP functionality at pixhawk 2.4.8 board and the clones? How significant would be performance penalty for such boards?
Is there data encryption at data link layer? Asking because I’ve read some PPP documentation pages and it looks like PPP ECP is kind of optional-ish. Having encrypted telemetry link over serial would be way more secure than just signed mavlink packets.
Asking questions before actually trying. To see if it is worth a try.
I haven’t tried on a STM32F4xx. Please have a try, but you may find you run low on memory
there is no encryption support
Brilliant. A thousand thanks to tridge and everyone who contributed to this milestone in flight controller development:
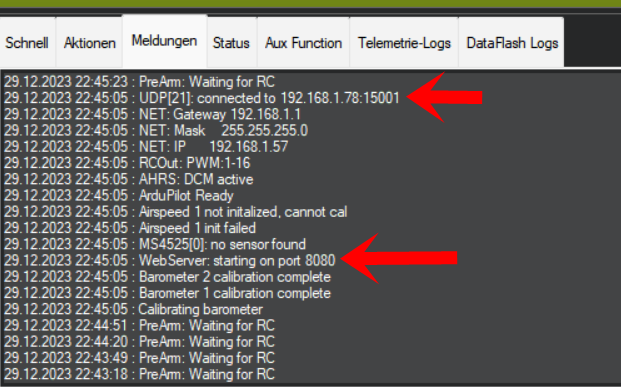
With master firmware on a new Pixhawk 6x, the UDP connection to Mission Planner and simultaneously an HTTP server with the demo LUA script worked like “out of the box”. Still an unfamiliar sight: FC connected to the home network.

Since no GPS is connected to the FC on the workbench, the AHRS and GPS location are logically not displayed:
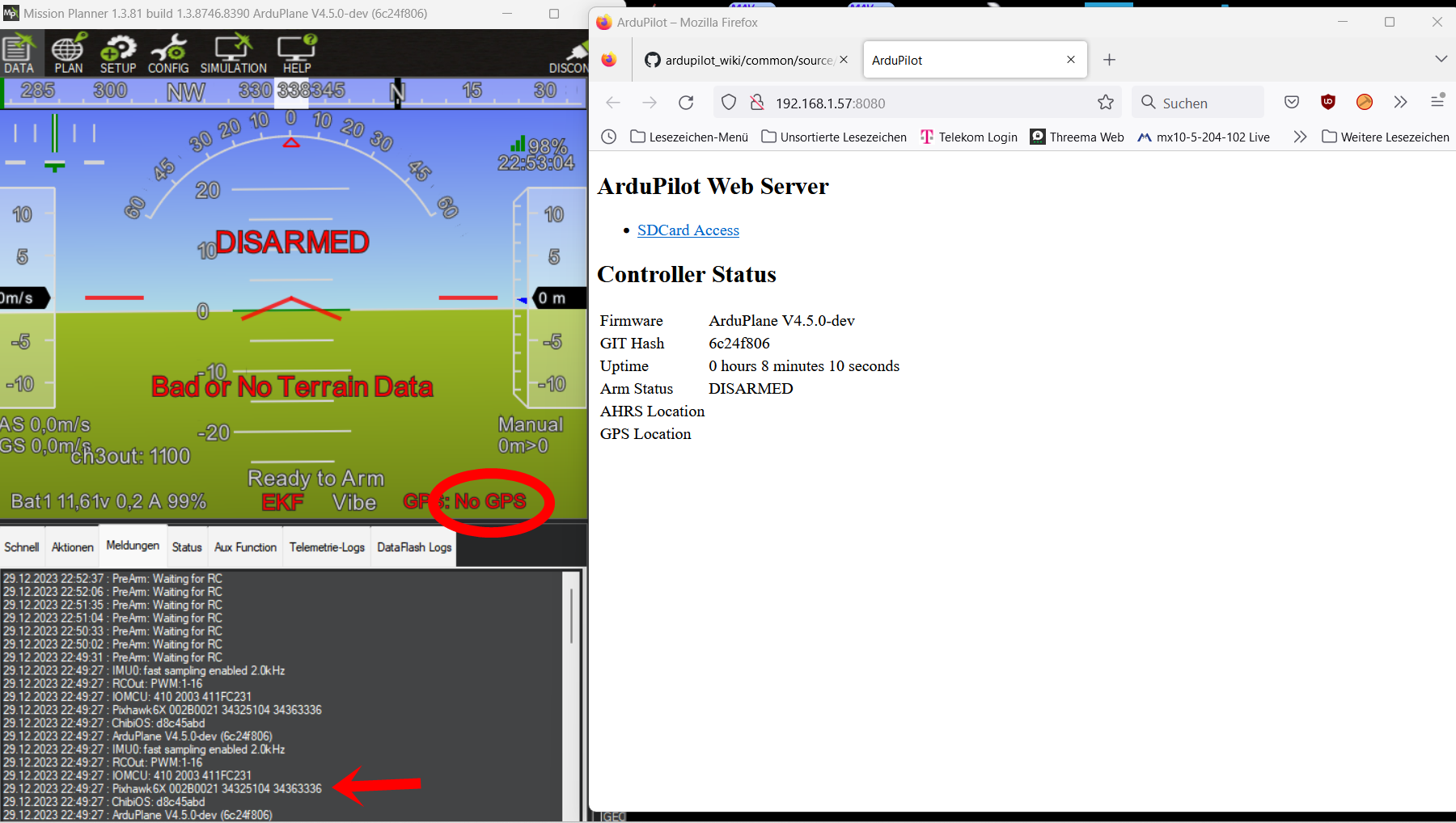
Great: If a GPS fix is available, the AHRS/GPS position are displayed as hyperlinks, when I click on it, the position is displayed in google maps on my laptop.
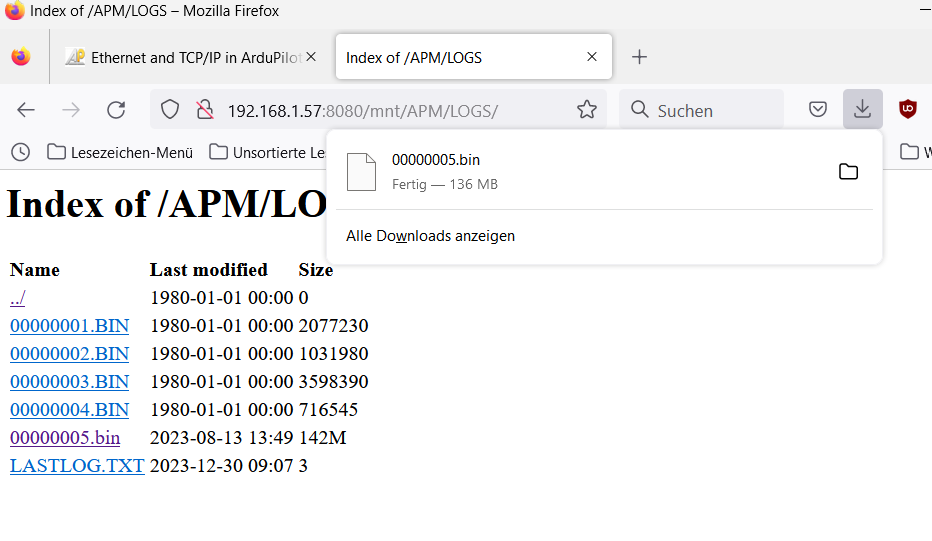
I have not stopped the time for the log file download, but it feels much faster compared to the USB connection. To test this, I copied a 136 MB log file from some flight to the SD card and renamed it accordingly. The speed is impressive, so it’s not worth connecting the USB or removing the SD card and inserting it into the laptop for reading:
It would be great if you could also execute LUA commands on the server side by clicking on a button, for example.
Regards Rolf
2 Likes
Looks like BVLOS seamless operation is going to be easier and easier going forward with companion internet ready stack board.
Thanks for this nice feature! I can confirm that it works great with my “more or less” DIY-Project, the NucPilot. A PCB, with IMUs, Baros, Mags, SD-Card, FRAM, 32Mbit Serial Flash, double CANFD, Serials, PWMs, RCIN, up to 12S input voltage via XT30, that you can put on a Nucleo-Board, in this case the one with dual core MCU ( NUCLEO-H755ZI-Q). You can direct connect a RJ45 plug into the board and use the new Ethernet feature of ArduPilot.
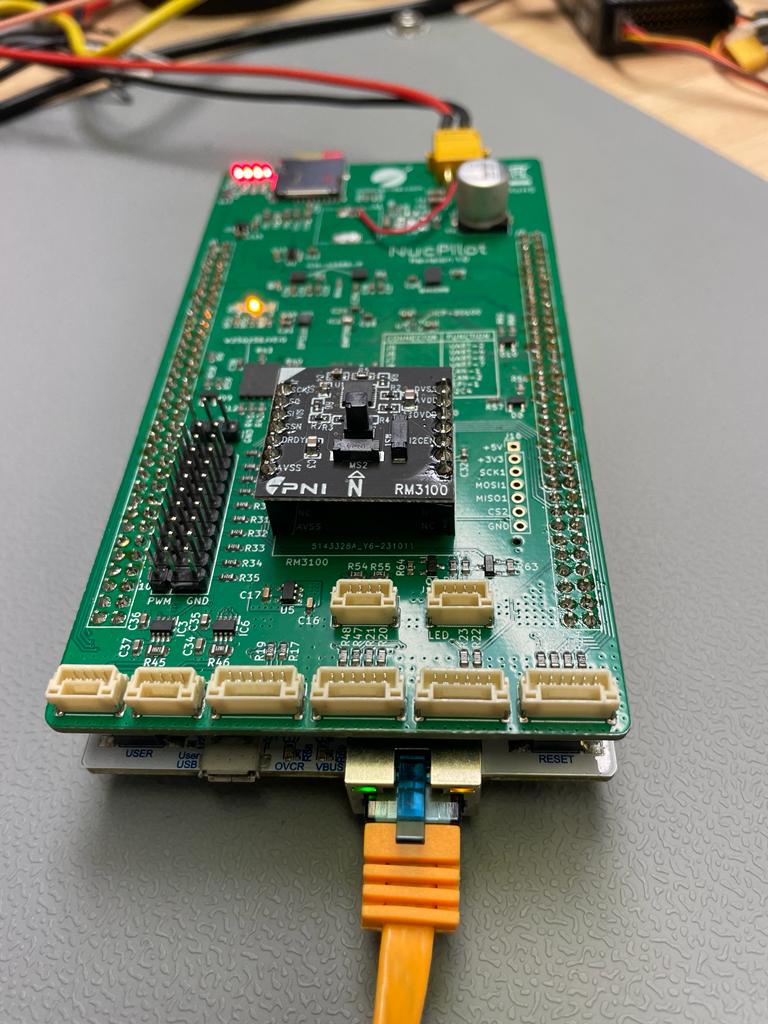
4 Likes
Nice board Mirko, are you using both H7 cores? What for?
Thank you Amilcar. The used MCU STM32H755ZI has a Cortex-M7 + Cortex-M4. At the moment only the H7 is used for ArduPilot. I have a couple of these boards lying around in my office. That is the reason for having that board.
sure, it is easy to add anything that can be done by lua. What sort of example would you like to see?
We can create a full GCS if that is wanted. I do plan on adding parameter editing