What is ESPrtk ?
ESPrtk is a small circuit board used to transmit wireless GNSS data in high precision positioning applications.
ESPrtk is geared towards the ability to use high quality, independent, wireless and low cost platforms.
ESPrtk’s heart is a powerful ESP32 processor.
So what does ESPrtk include?
ESPrtk is an abbreviation for ESP32 RTK.
ESPrtk is available in two formats. Software for DIY users and hardware for direct users.
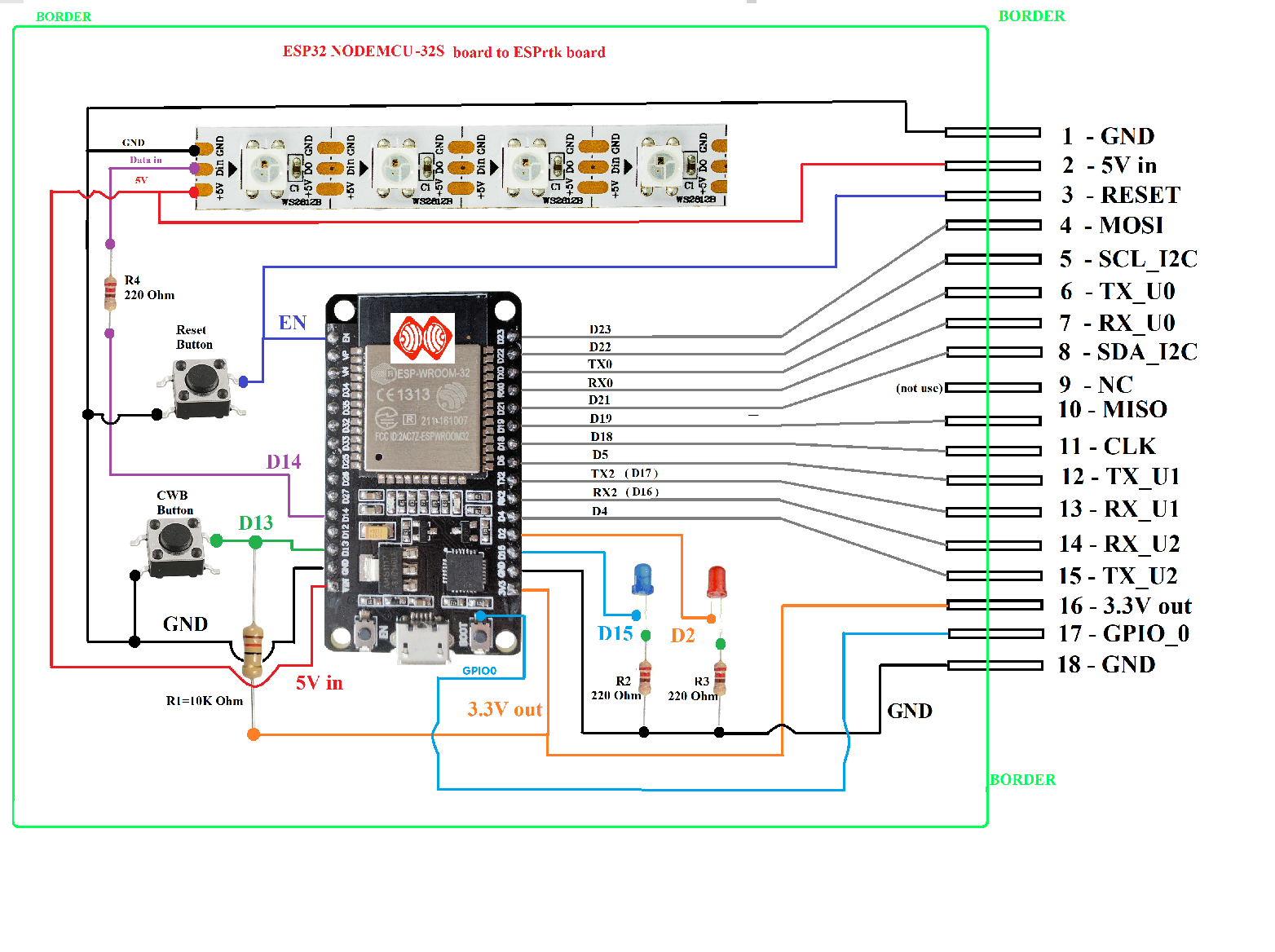
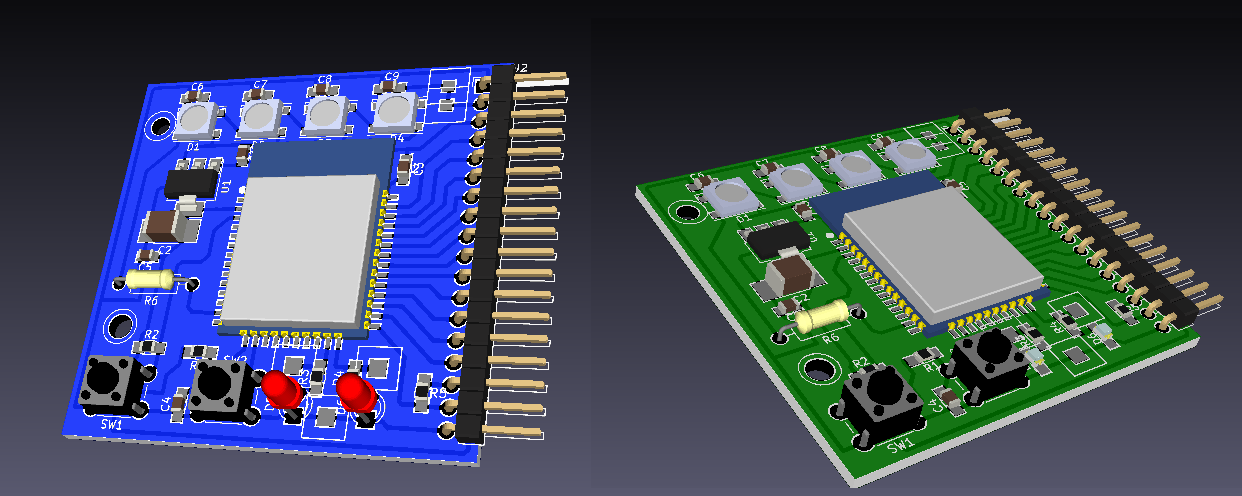
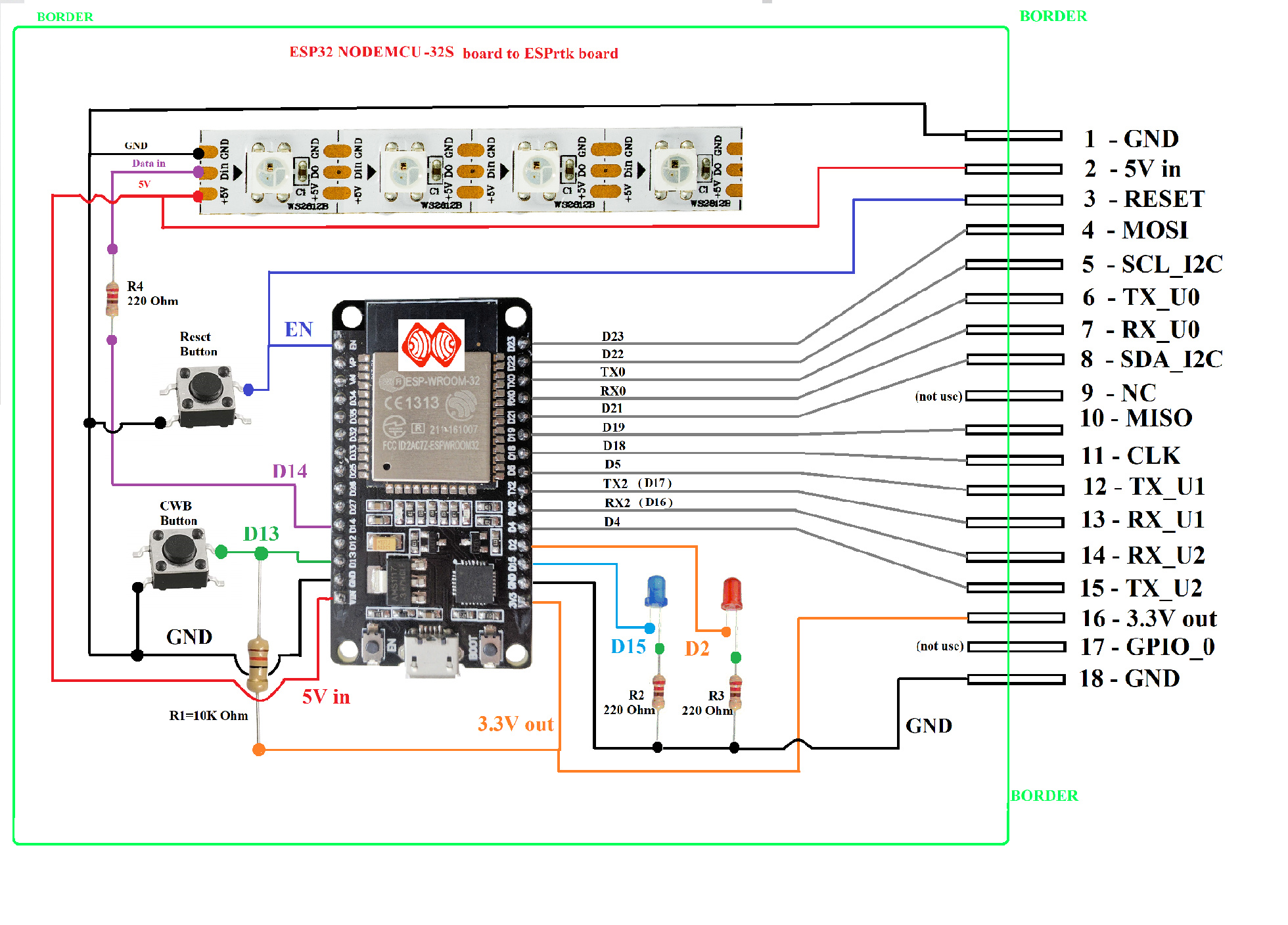
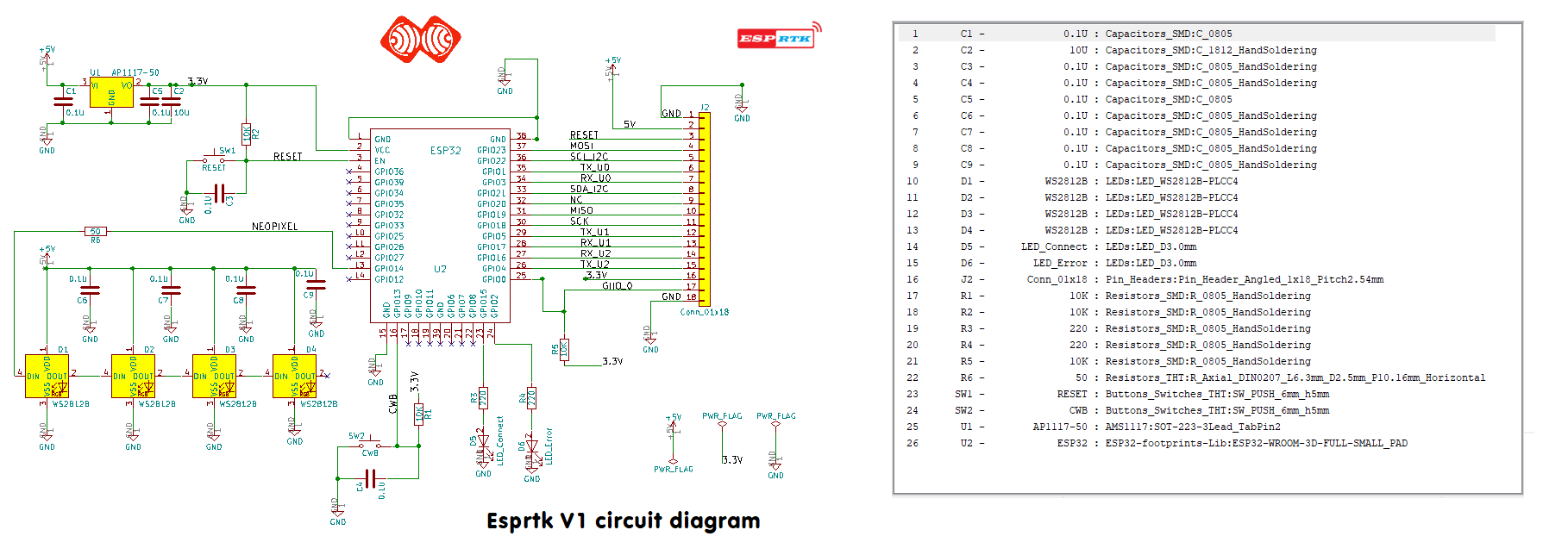
An ESPrtk V1 circuit board:
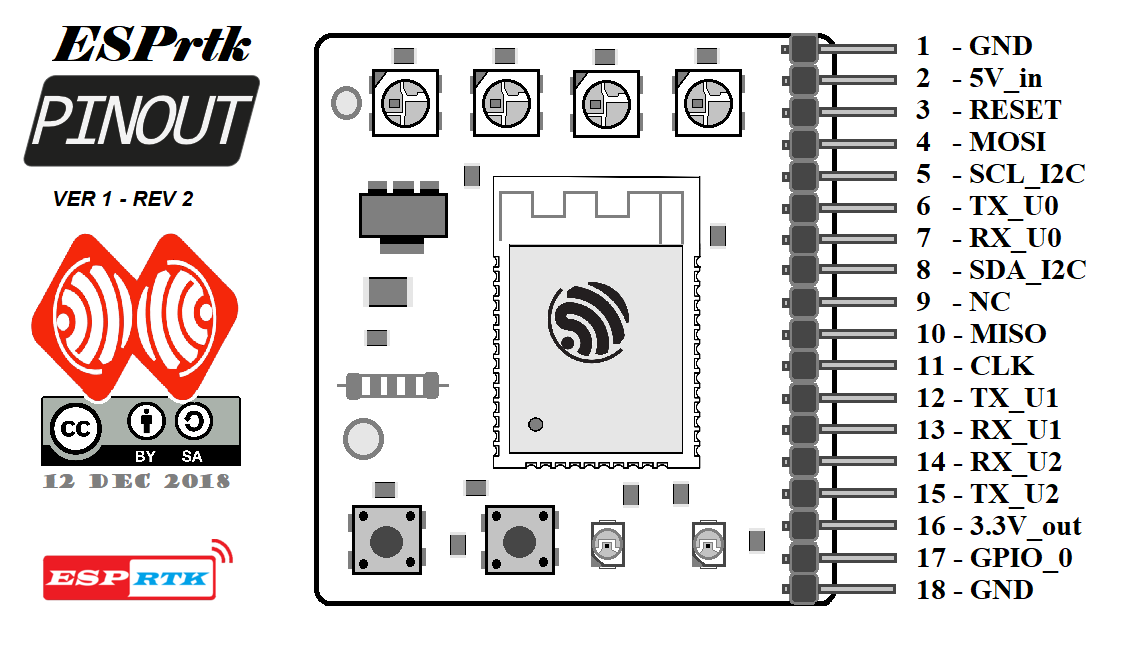
ESPrtk board V1 pinout mapping:
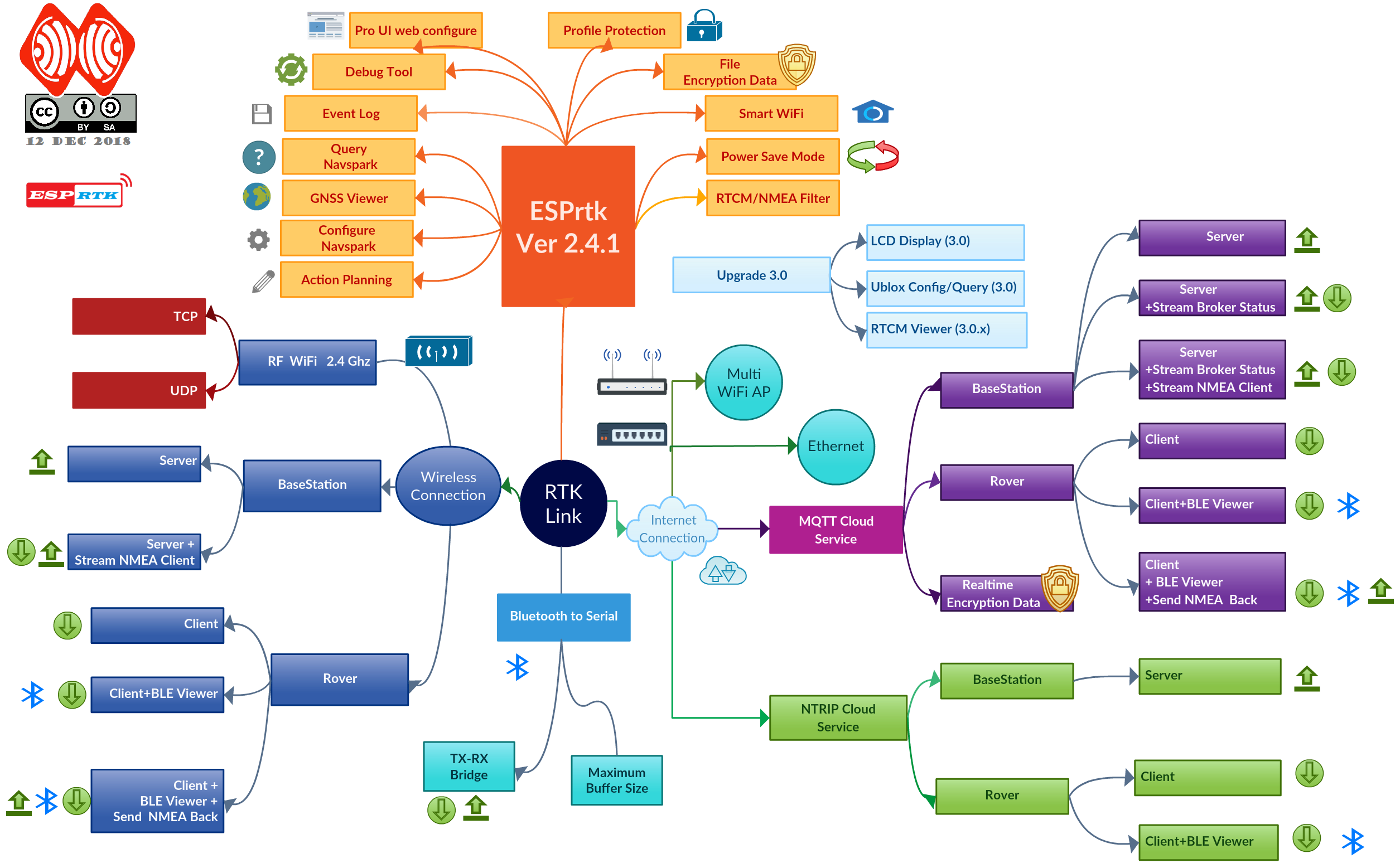
and features on its 2.4.1 version:
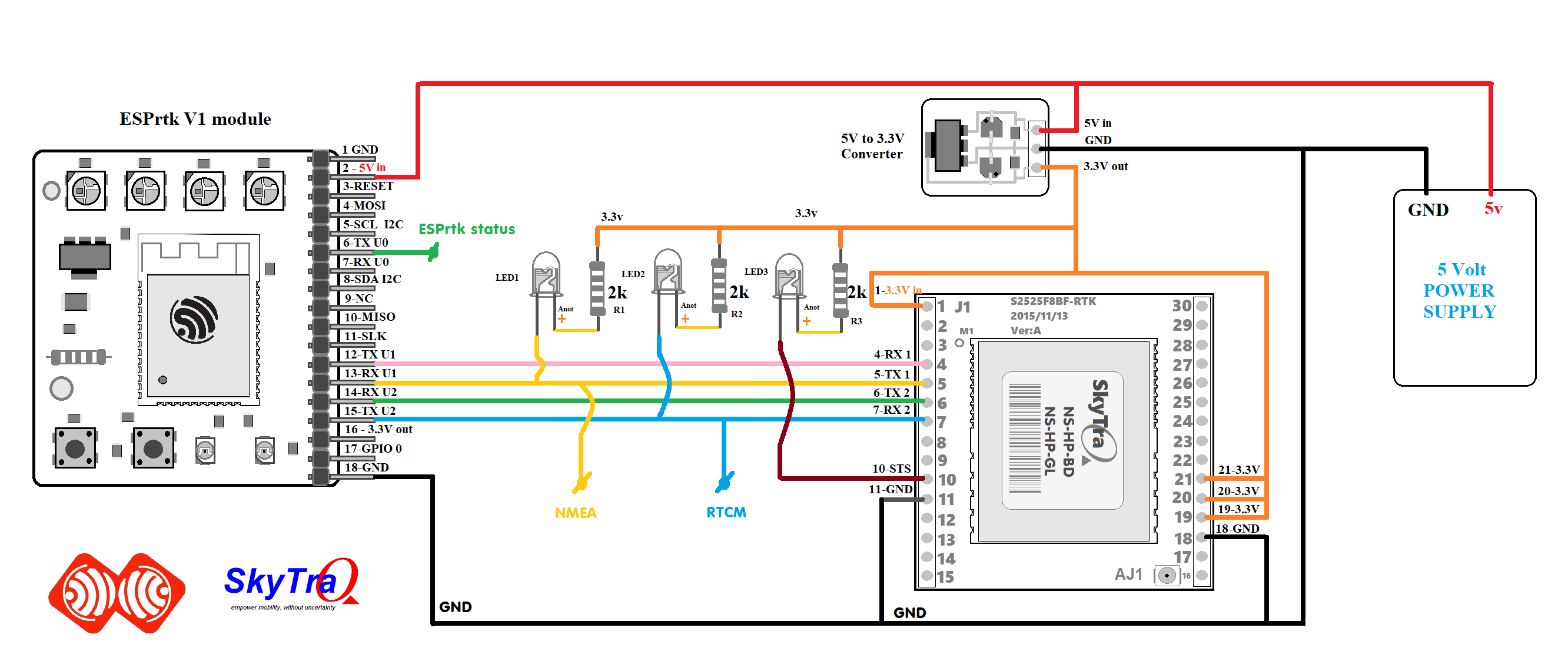
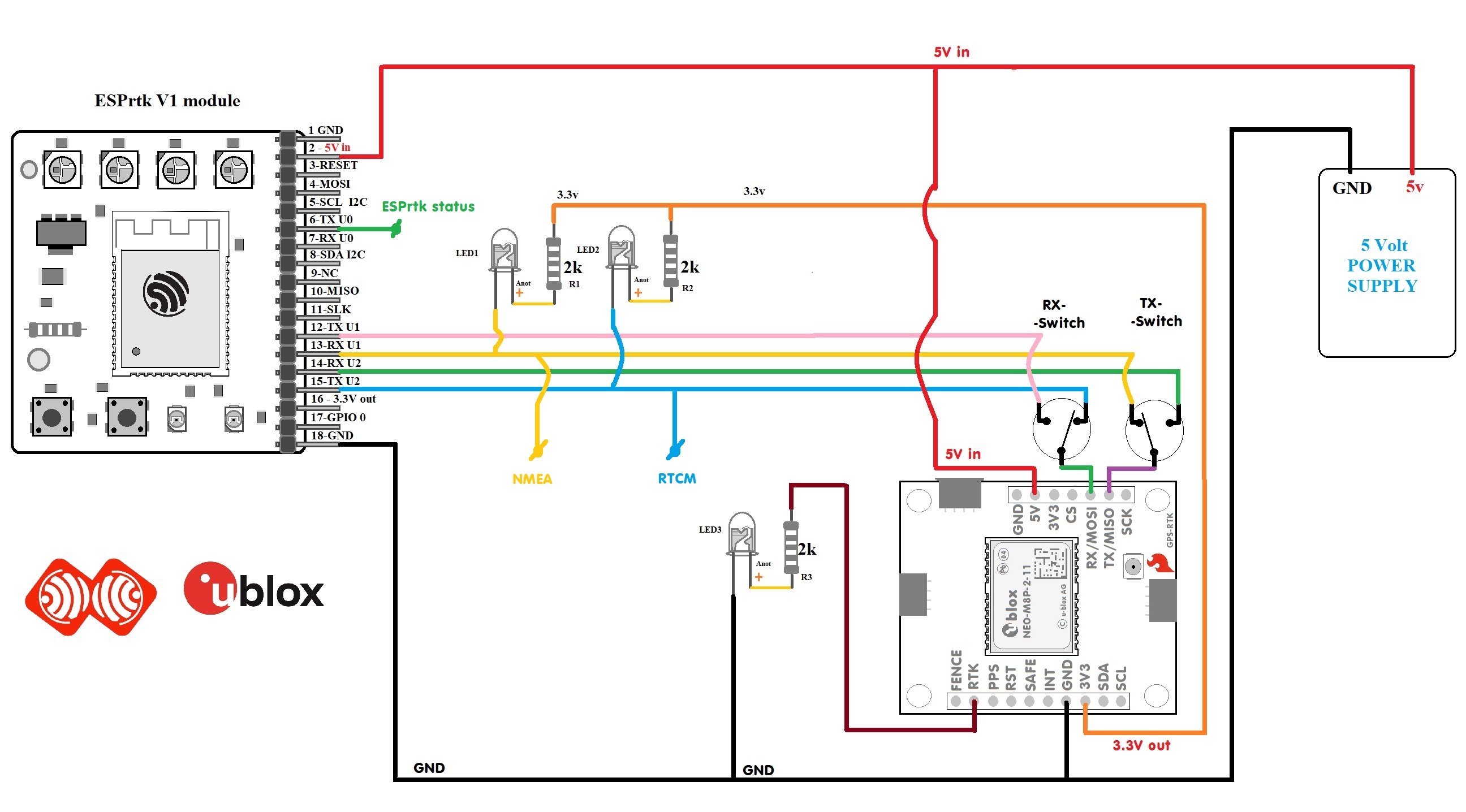
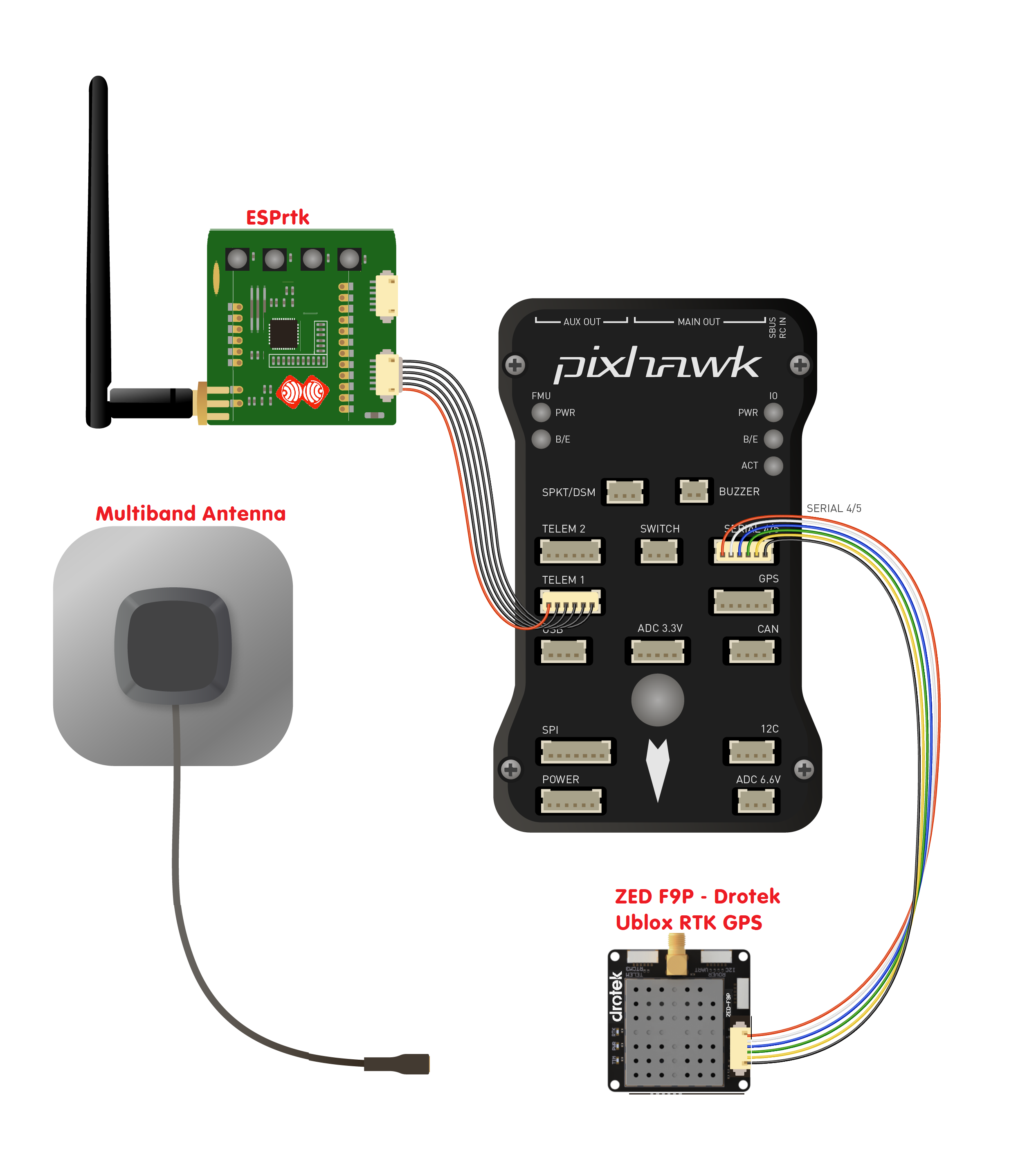
ESPrtk can be used with many GNSS RTK devices.
RTK-capable receivers require precisely calibrated antennas to process signals transmitted by the GNSS satellites. The process for achieving centimeter-level position accuracy in GNSS involves a complex algorithm known as real time kinematic (RTK) processing. In addition, they must receive and process corrections data from a ground network of GNSS receivers. These factors made traditional RTK-capable receivers costly (in excess of $5000 or even $10,000 ) and bulky, making them unsuitable for cost- and size-sensitive applications.
Recently, GNSS equipment manufacturers have started advertising inexpensive (less than $500) and compact RTK-capable receivers. Some prominent names:
- Hemisphere- Eclipse P307 (L1/L2).
- NVS Technologies- NV08C-RTK (L1).
- Swift - Piksi Multi (L1/L2).
- u-blox -NEO-M8P (L1).
- Skytraq -S2525F8 (L1).
Evaluation of Low-Cost, Centimeter-Level Accuracy OEM GNSS Receivers.
RTK receivers are getting smaller and smaller, but accuracy is improving. At the same time, there was a powerful embedded CHIP is ESP32, which attracted everyone in IoT applications and GNSS data transmission for RTK positioning is one of them.

ESPrtk aims to be simple, user-friendly and safe to use.
ESPrtk was born to provide High quality RTK positioning solution with low cost option. This is an effort to make accessing and using high-precision positioning technology easier for everyone. Especially for those who have hobby about it.
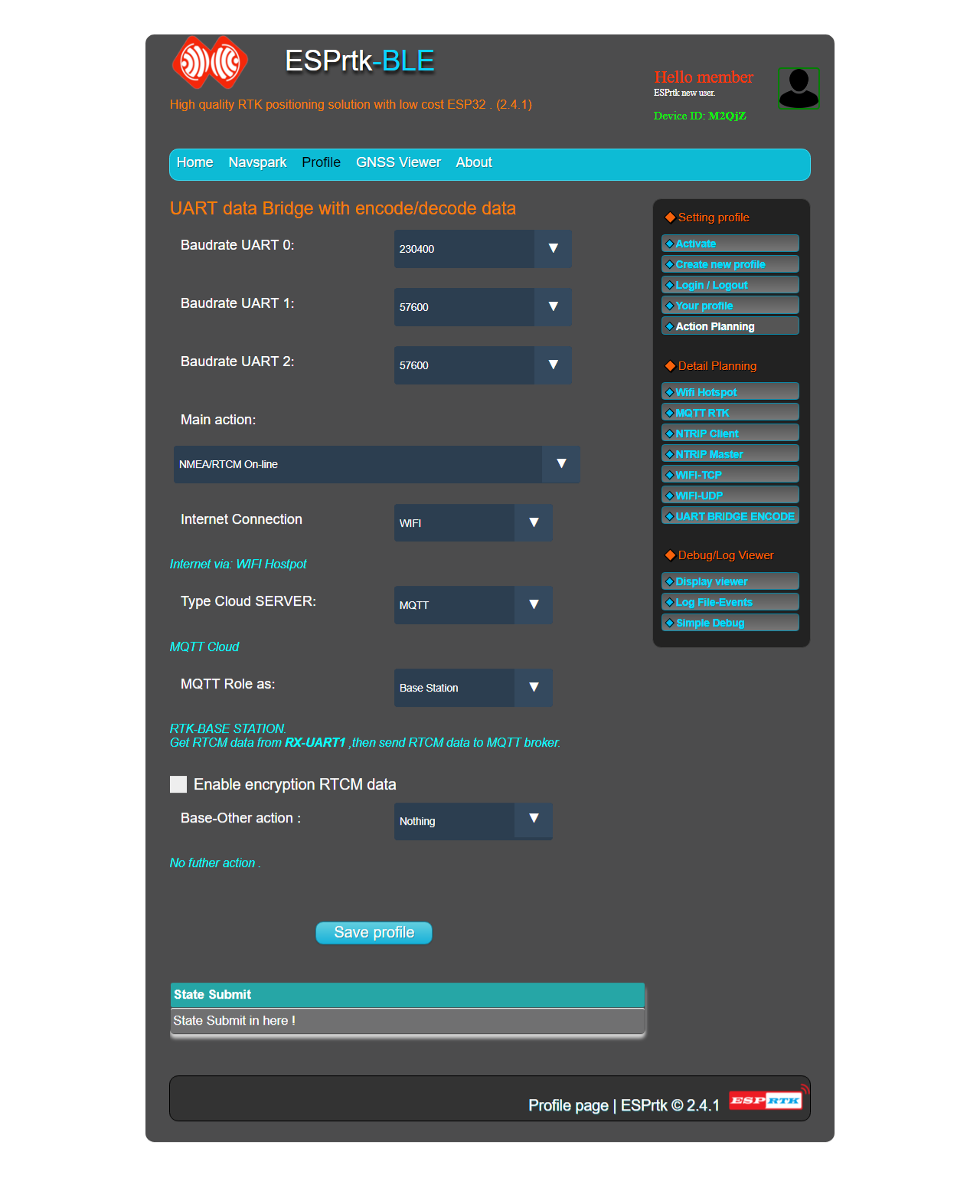
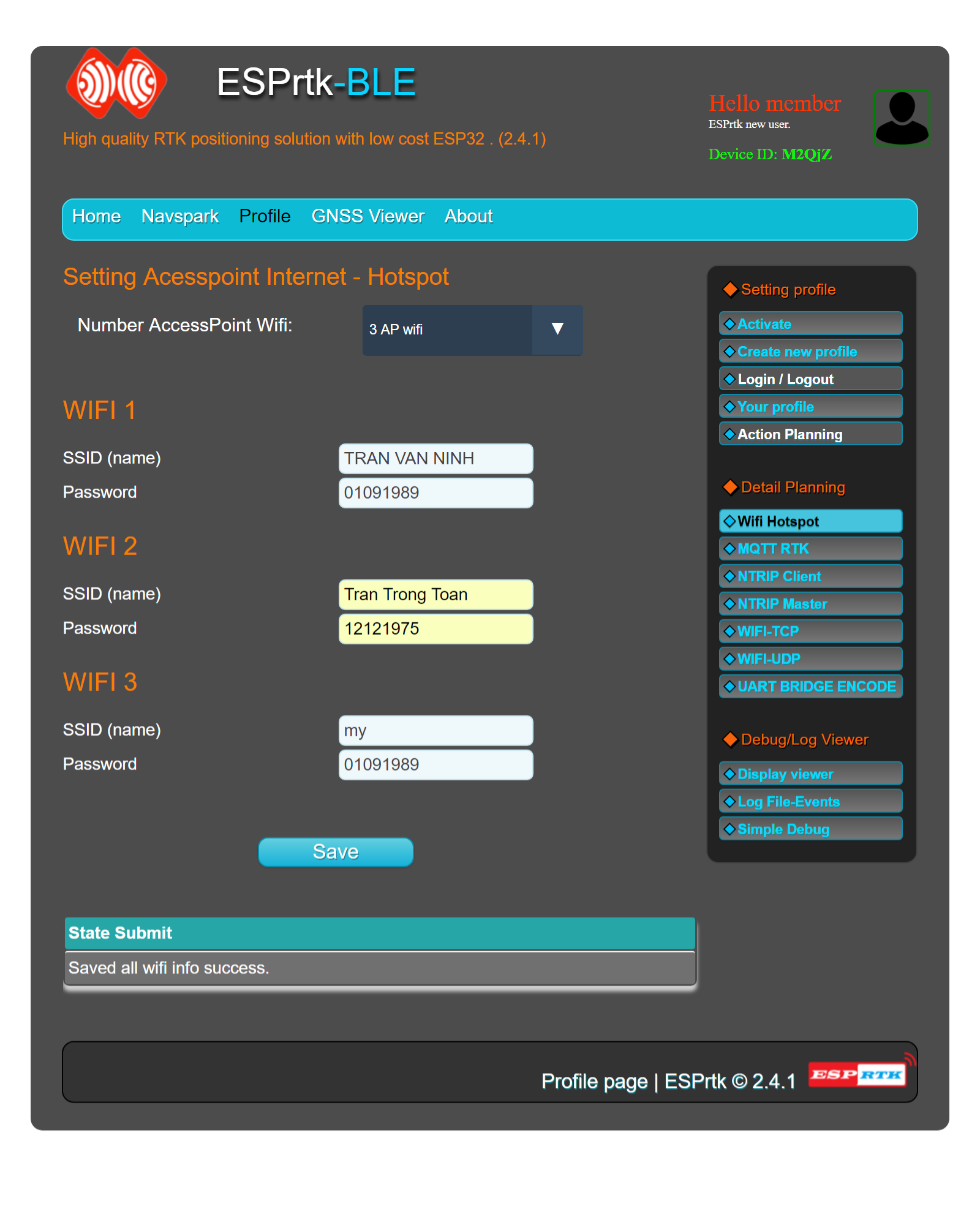
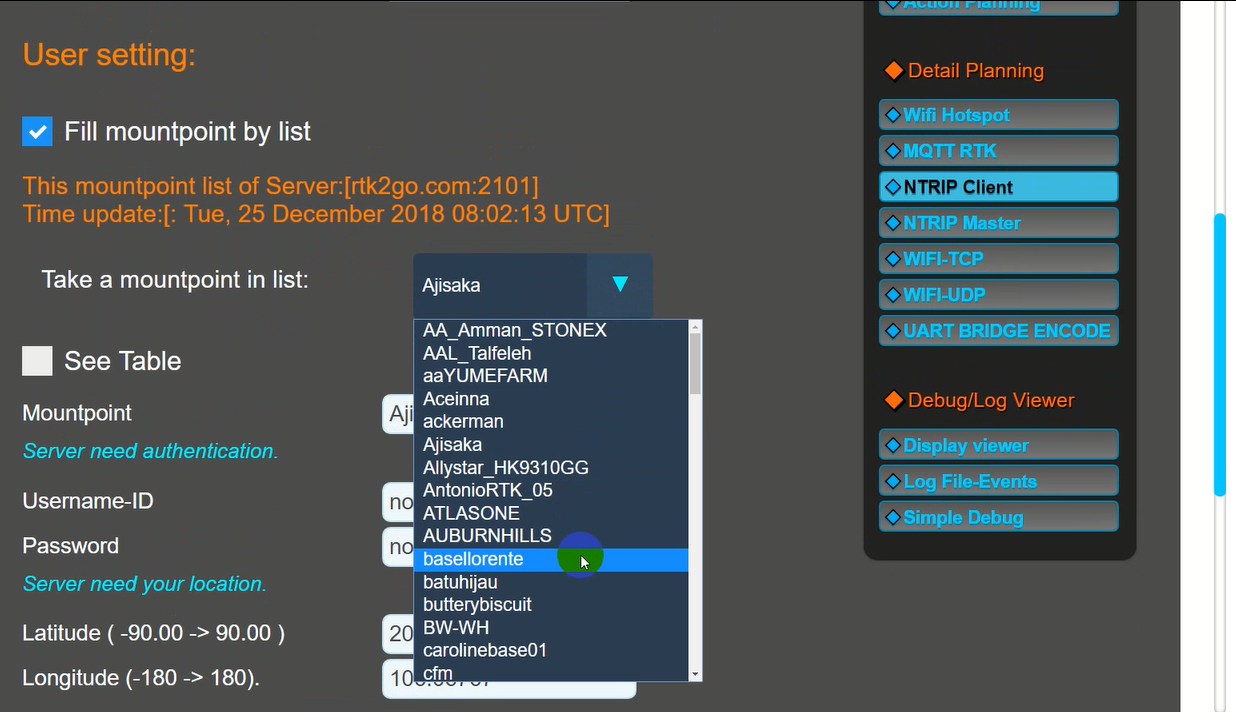
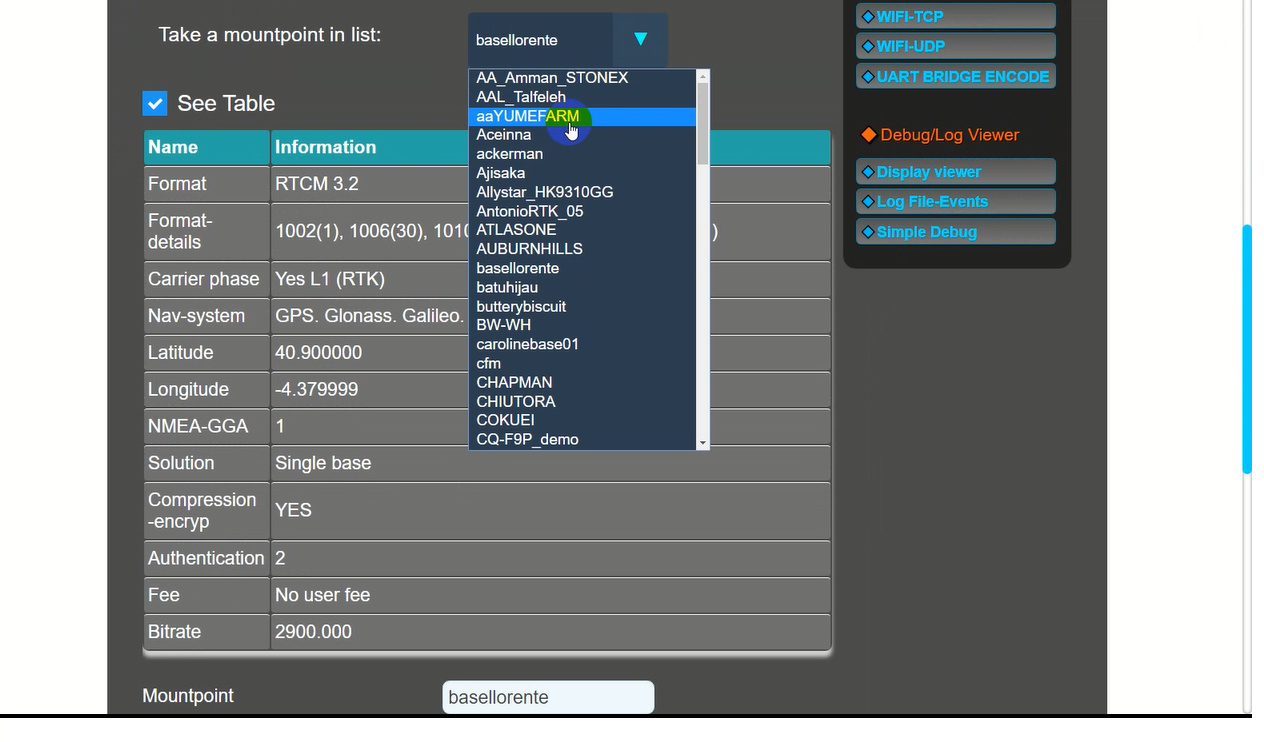
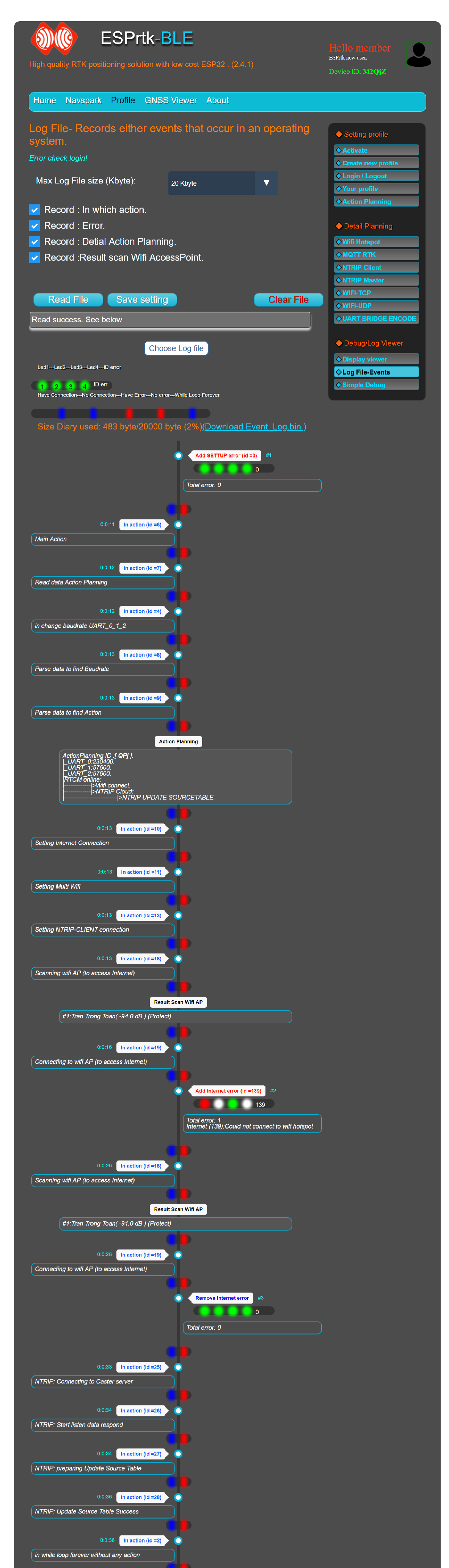
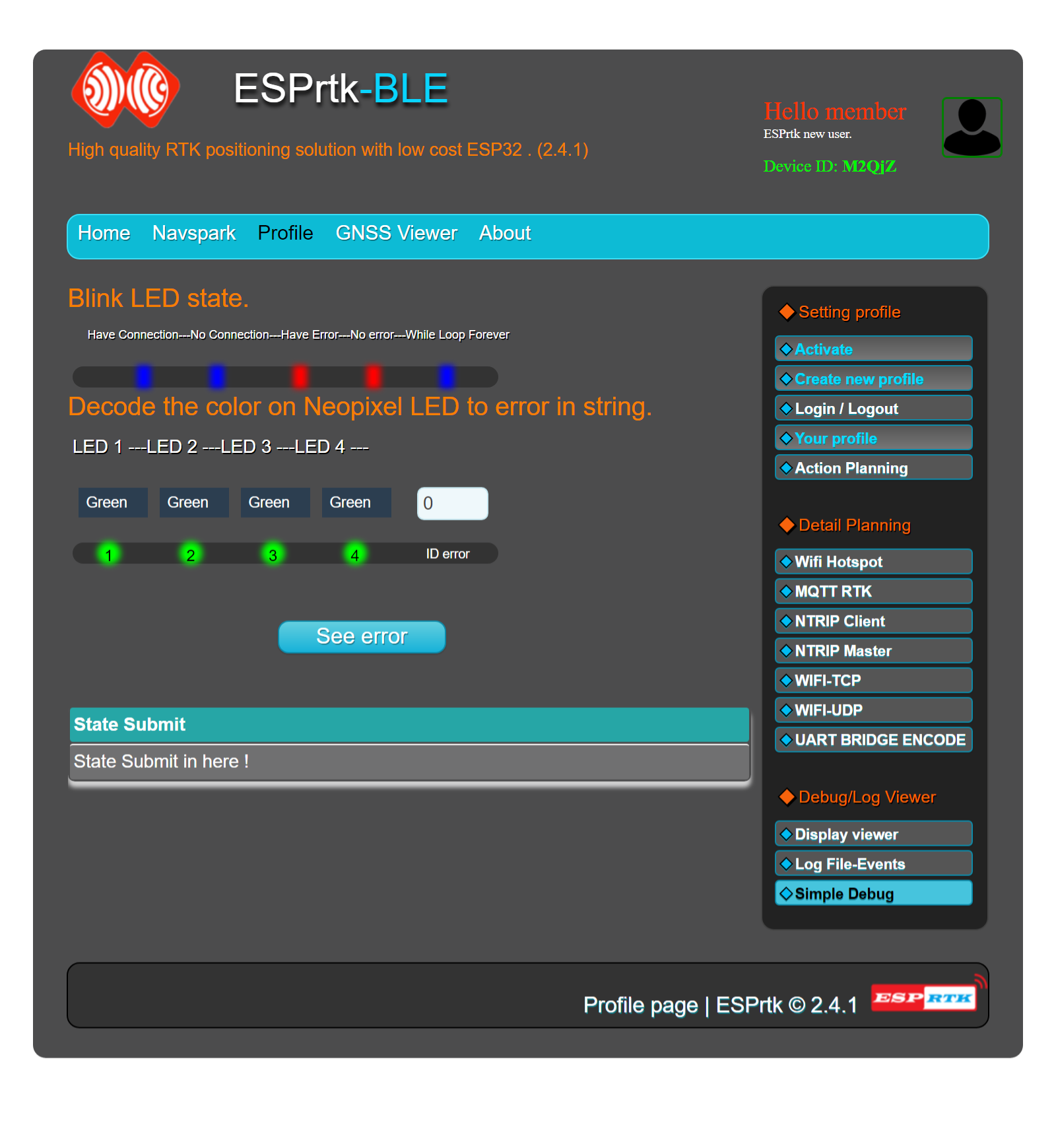
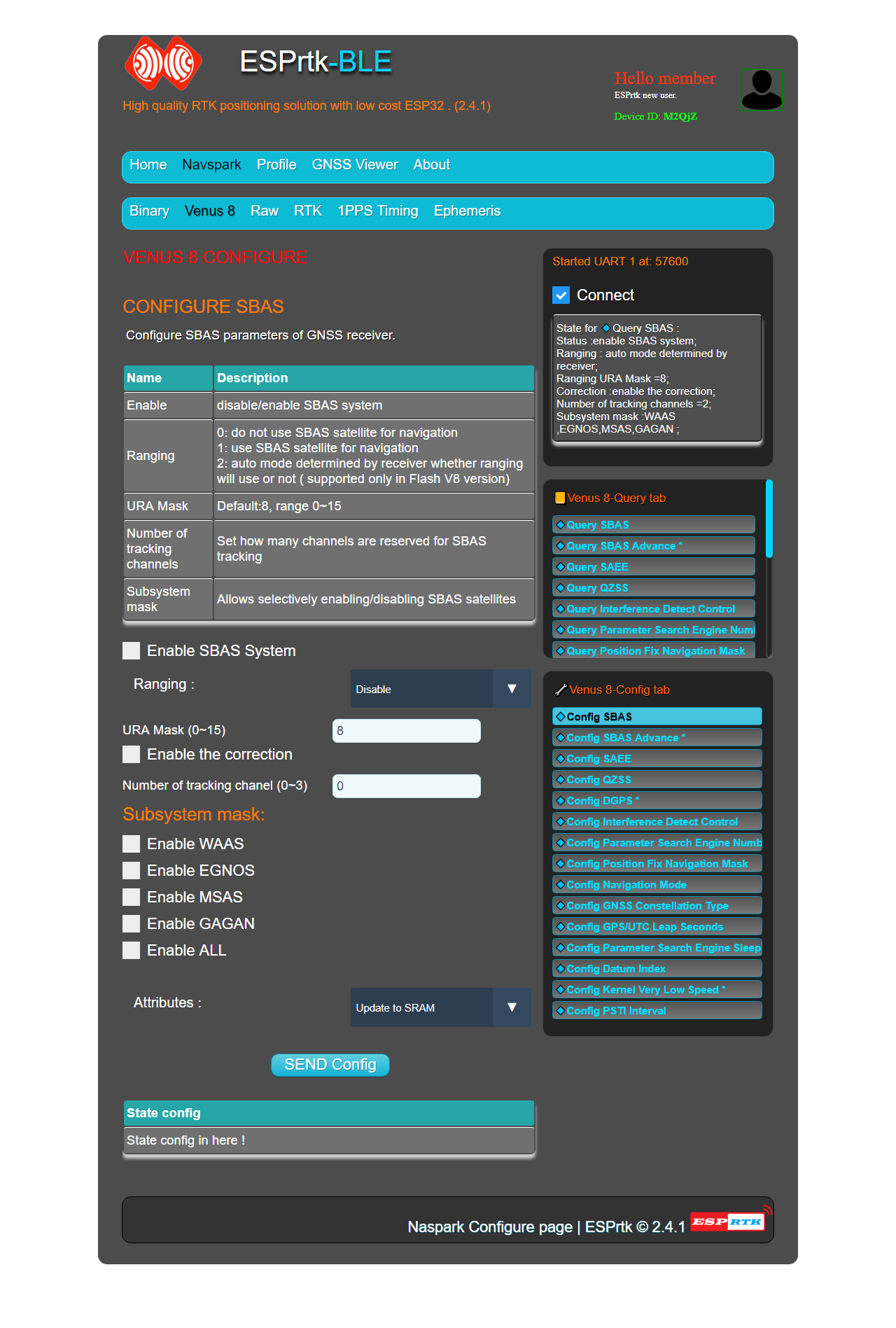
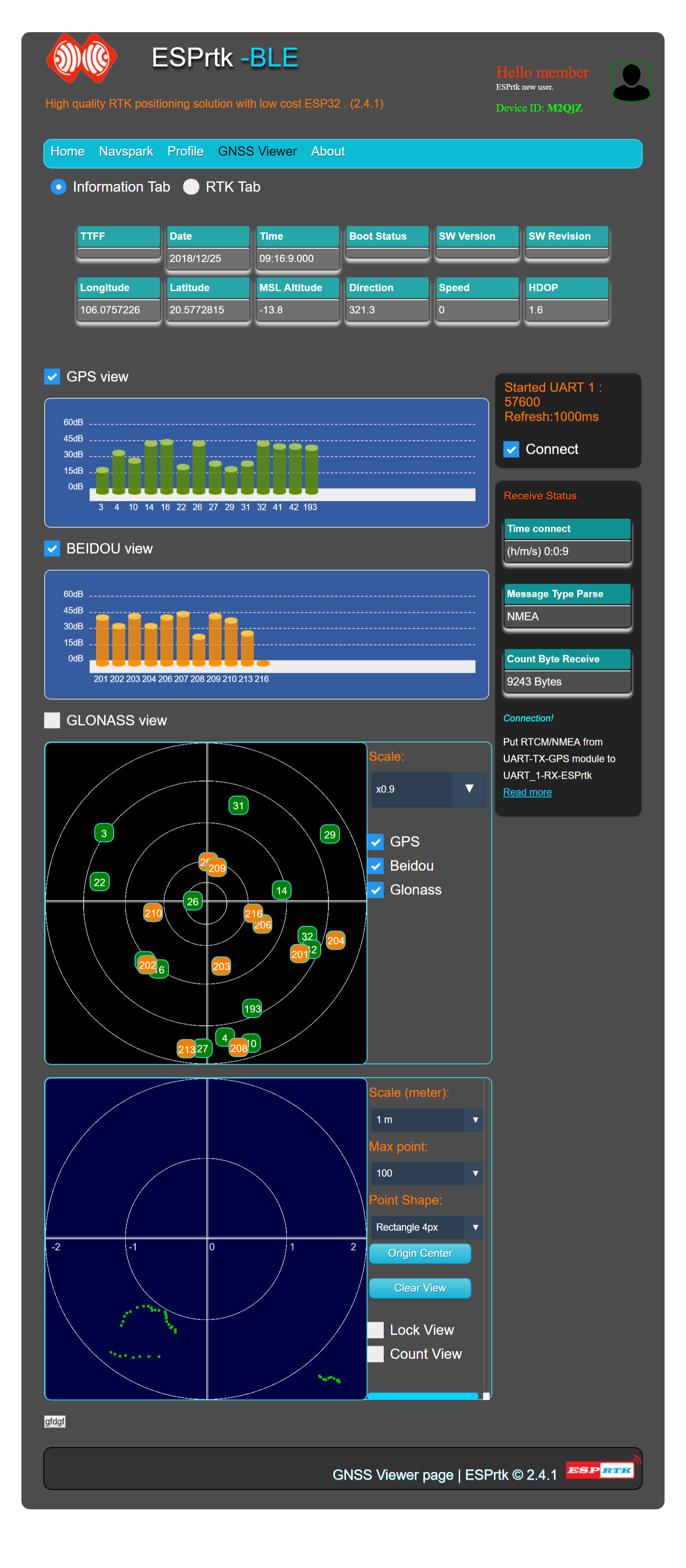
Highlights of the design are the Web Config User Interface (UI) application, which makes it easy to test or configure it and the peripherals it connects to.
Along with that are layers of security with high-level encryption for transmitting GNSS data to public servers (where your data can be abused without your permission). Data encryption is also applied to all important files on ESPrtk in order to protect users as much as possible. Users can even activate a permanent lock with their password to make sure no one can change anything on their ESPrtk.
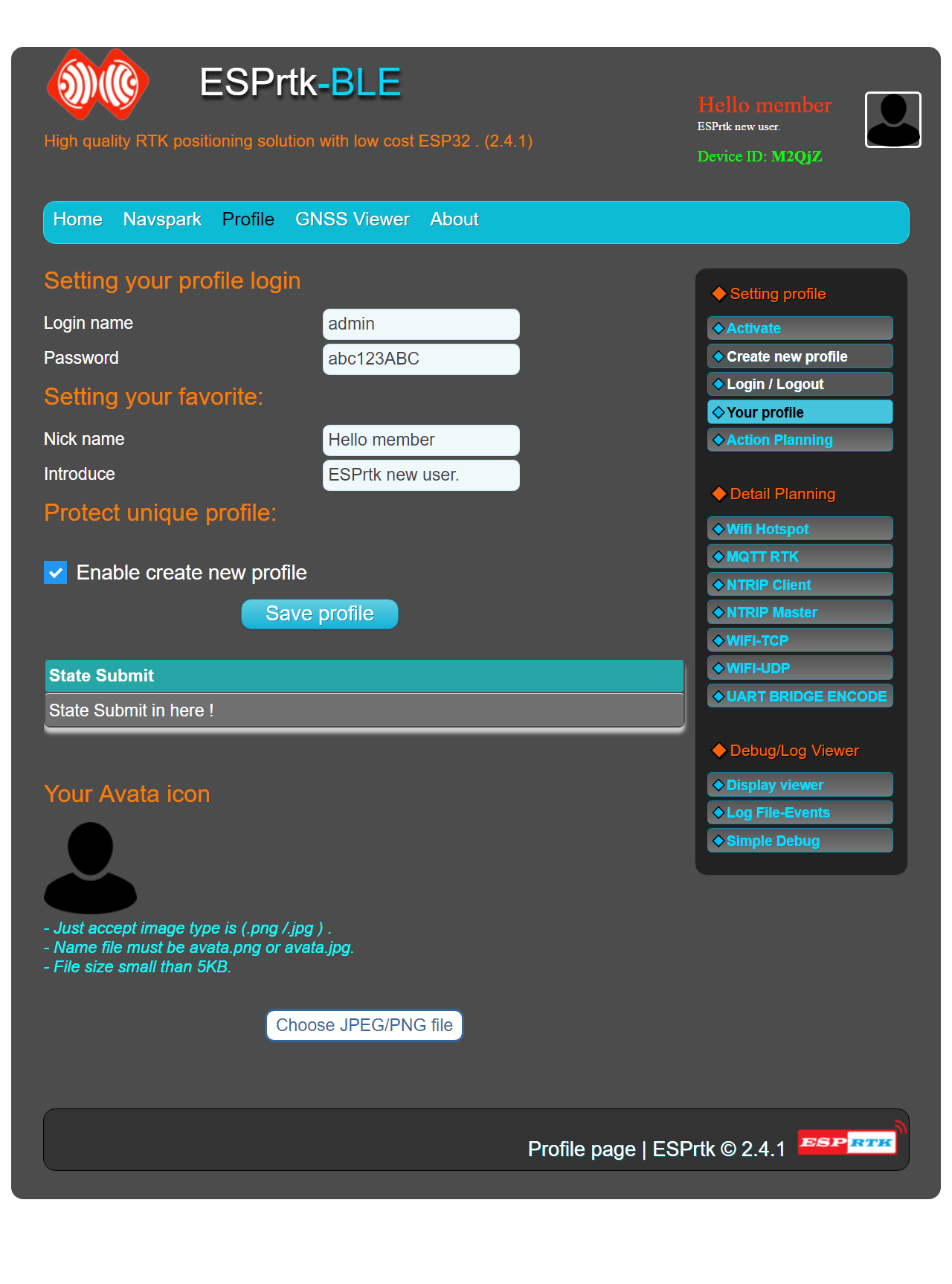
(Screenshot ESPrtk-BLE is running web configure on Google Chrome to setting some profile’s information. )
RTCM 3.x, RAW, NMEA are data types transmitted.
ESPrtk uses two ways to transmit data:
Online: ESPrtk is a client that uses a service to collect / distribute data from the server via an internet connection (WiFi/Ethernet).
Offline: ESPrtk will use its own Wifi or Bluetooth connection to perform wireless communication in the distribution of data.
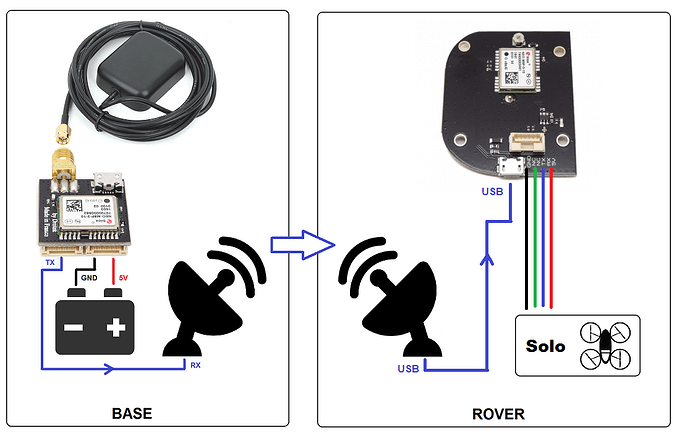
If set to a Base, it will collect data from one of the UART ports and then send it over the wireless interface to one or more other devices (Rover).
If set to Rover, the data received from the Base will be streamed to the UART port to the RTK module.
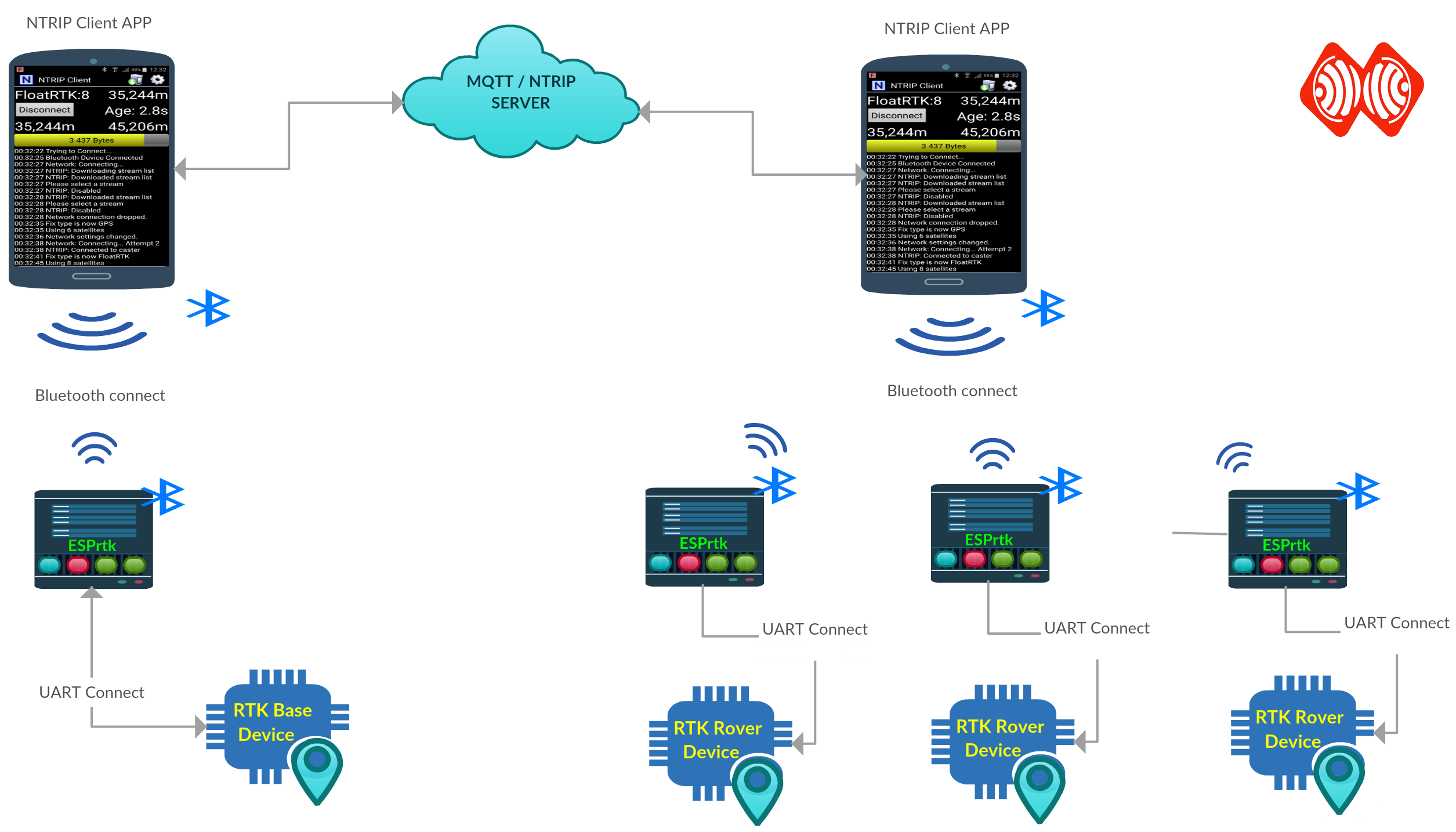
MQTT model:
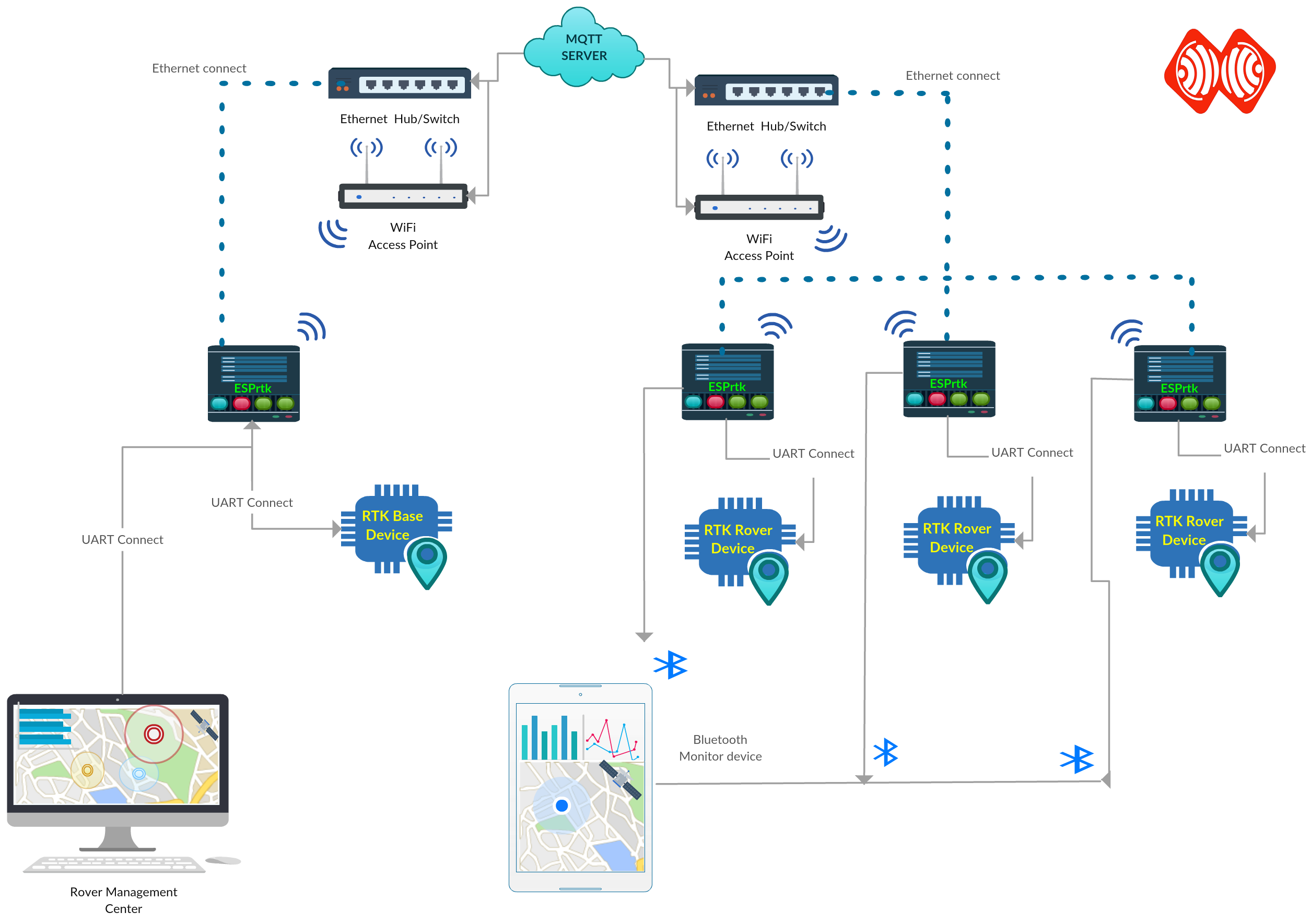
MQTT RTK is the most powerful transmission model today and will be the future alternative to NTRIP.
REAL-TIME VEHICLE MONITORING AND POSITIONING USING MQTT FOR RELIABLE WIRELESS CONNECTIVITY
MQTT Protocol for Real‐Time GNSS Data and Correction Distribution
China Satellite Navigation Conference (CSNC) 2018 Proceedings
ESPrtk, when fully configured, can provide multiple connections at the same time.
ESPrtk is a Base can send RTCM / RAW to MQTT Server (Broker). (and Stream out NMEA data collection from the Rover to controler center.)
ESPrtk is a Rover that receives RTCM data from the Broker. ( can also export NMEA data to another device via Bluetooth at the same time.)
NRTIP model:
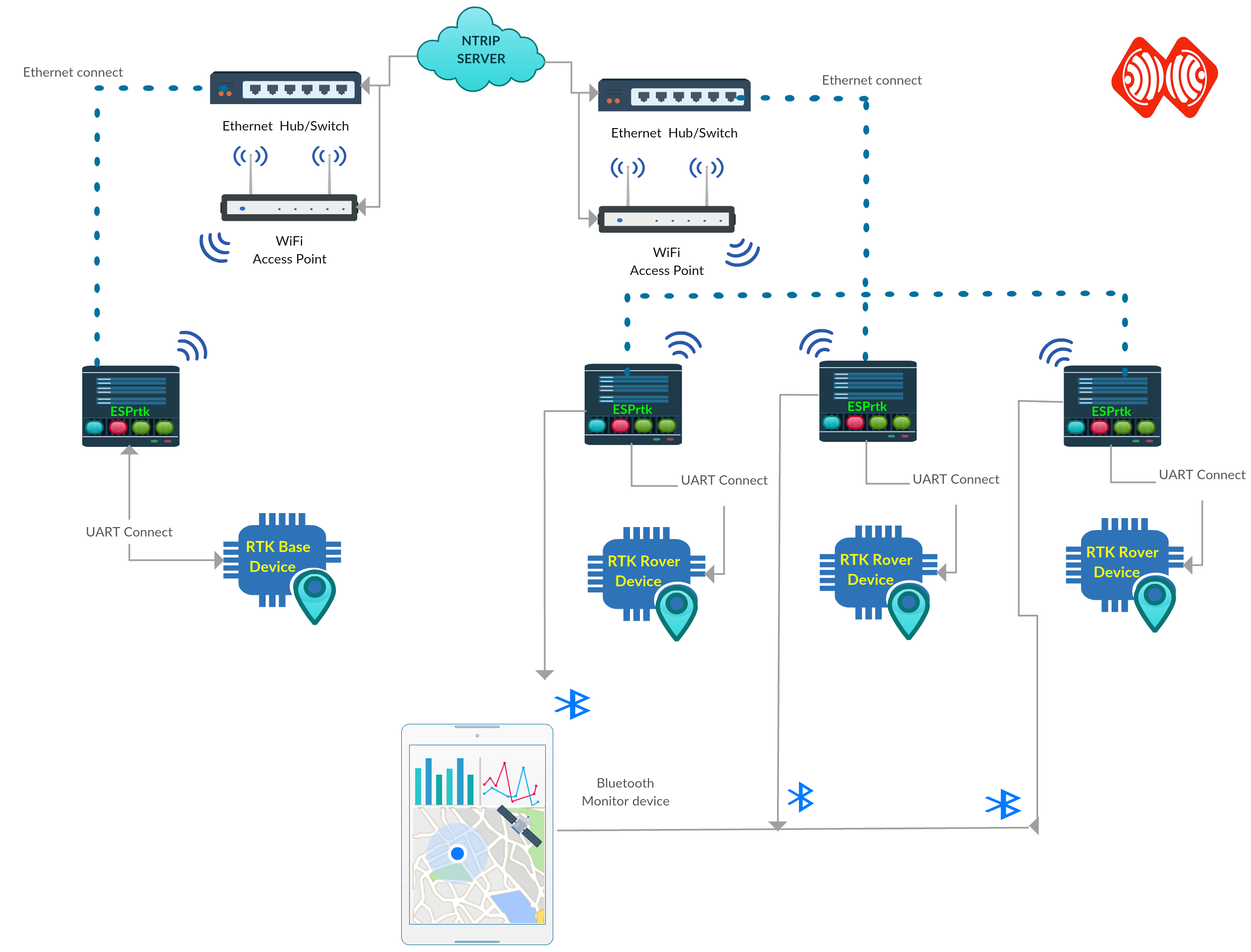
NTRIP has a history of over 20 years of development with extensive base networks around the world. Supported on any existing device. ESPrtk too.
ESPrtk is a Base can send RTCM / RAW to NTRIP Server (Caster).
ESPrtk is a Rover that receives RTCM data from the Caster. ( can also export NMEA data to another device via Bluetooth at the same time.)
Offline using WiFi signal:
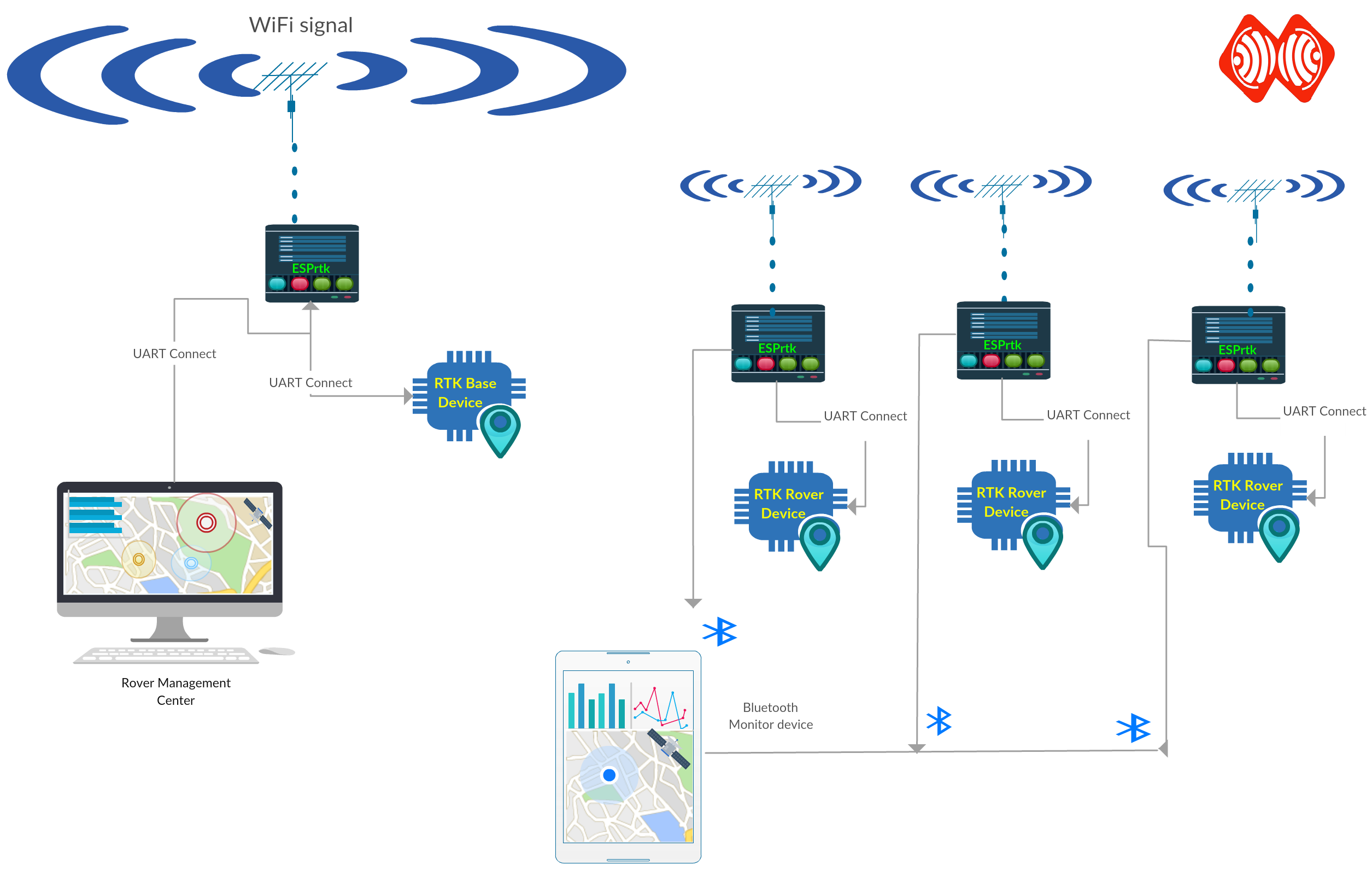
When the internet connection is unavailable (the NTRIP / MQTT online service is not available), ESPrtk can use its WiFi signal to transmit GNSS data.
This is similar to the full MQTT functionality but is offline. The connections deployed in both protocols are TCP and UDP with the distance constrained to the WiFi transmit power.
ESPrtk will operate stably with a 150 to 200 meter baseline when using external antennas.

(Esp32-wroom-32u-front-back support external antenna. )
Bluetooth bridge RTK:
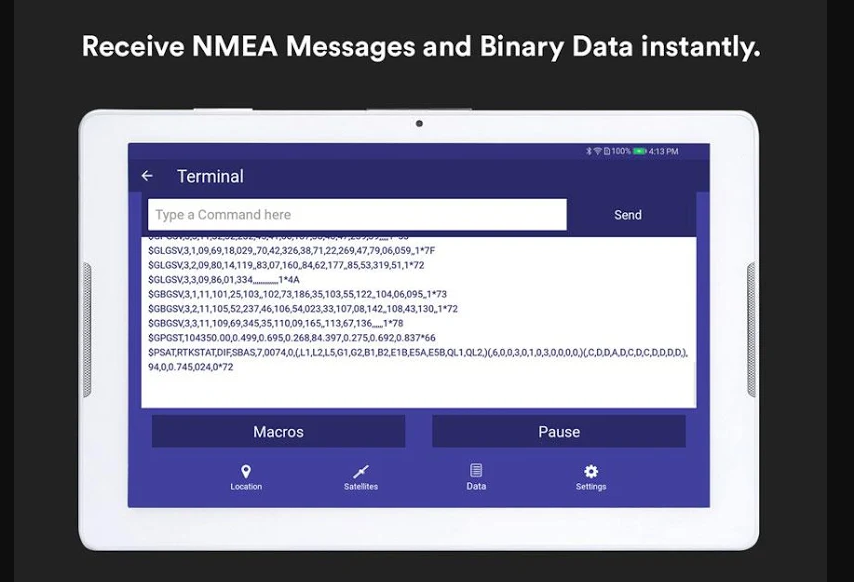
SPrtk will work just like the Bluetooth-To-Serial module. It will collect (regardless of RTCM / NMEA / RAW / … data type) from the RX-UART1 port and then send it to the Bluetooth device, or (and) Stream the data received via Bluetooth to the TX-UART2 port.
This function is particularly useful for users who want to collect output data from a GNSS device without having to directly connect to the wire. Featured Android applications such as “NTRIP Client” , “GNSS Surveyor”, “Bluetooth GPS”, “Bluetooth GPS Provider” ,”Mapit GIS”,”Bluetooth GPS Status Tool”, “SkyPro GPS Status Tool”…. supported this function.
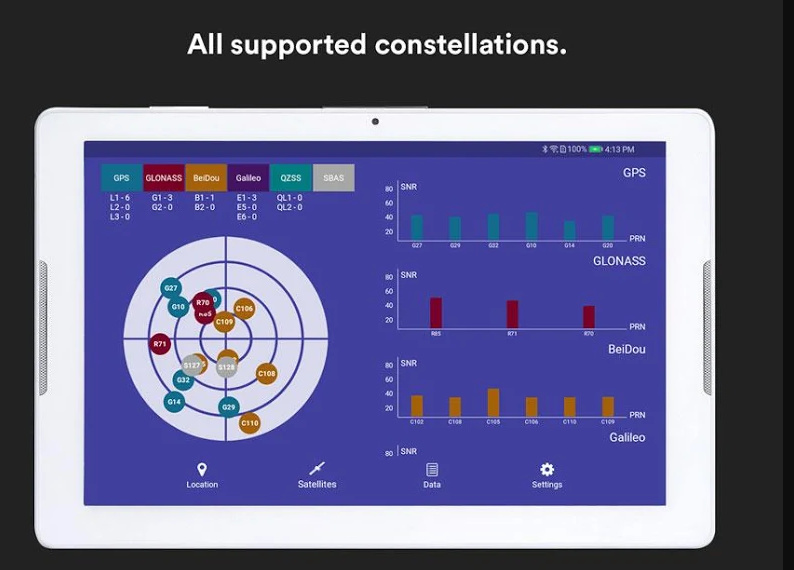
(screenshot on GNSS Surveyor app)
And more…
There is much to say about detail ESPrtk with interesting functions on it. I hope the introduction is not too short to finish, please read other articles to know more about them…on esprtk.wordpress.com
Free Firmware , Debug tool, Opensourse Hardware design, tutorials blog , image,… are available now at https://esprtk.wordpress.com/download-and-documents/
and follow us on https://twitter.com/esprtk







 - oh, but I realize I can’t buy them, or???
- oh, but I realize I can’t buy them, or???