Hello
I have installed DroneBridge on the ESP32. I can also connect to it via WiFi. Unfortunately, I cannot connect to the Cube Orange. I use Mission Planner 1.3.77 and Rover 4.2.2. I followed the instructionshttps://ardupilot.org/copter/docs/common-esp32-telemetry.html. What could be the cause of the error?
I could not get that to work either. I ended up using two esp32s and espnow protocol, but you should try this first from Yuri-Rage,
There is an esp wifi product, that probably ships with that firmware.
https://www.aliexpress.com/item/3256803248630357.html
My guess after looking at the product defaults to 115k bps, and autopilot I thought typically defaulted to 9600, so try to bump those up on the cube or lower it on the esp. The other issue may be the the uart port assigments are incorrect. like the product (even though it is an 8266) actually gets rid of the uart to usb converter chip which I believe is uart0, so it might be pumping the data out of serialmon if you are using the ArduinoIDE, but that isn’t the serial port connected to the cube, which means you have to edit it to have the correct serial port and upload the firmware with the change. The last easy issue could be it is wired wrong, it is Tx->Rx and Rx ->Tx
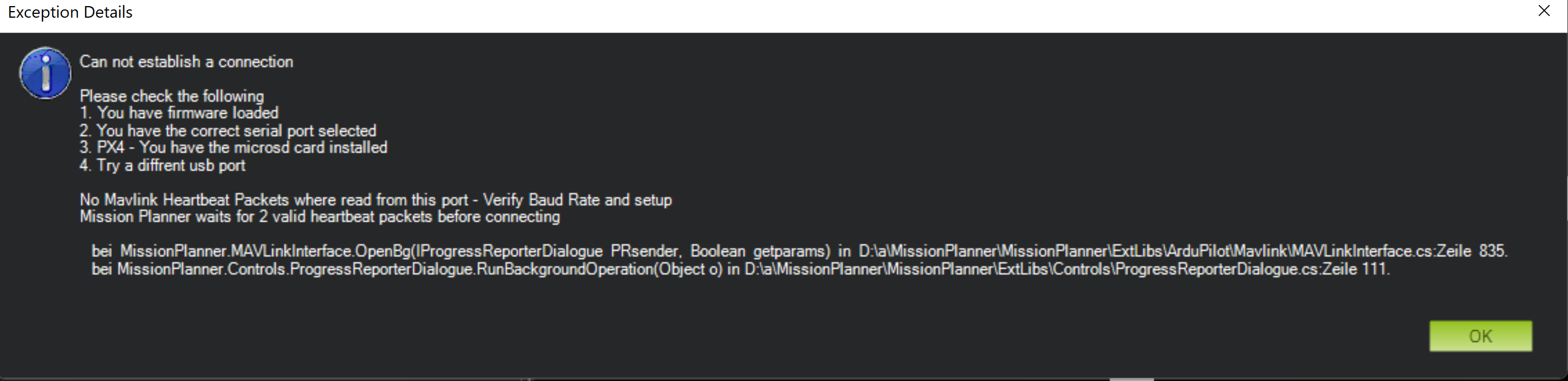
Thank you very much. I checked the wiring again and adjusted both to 9600. Then I get the following problems:
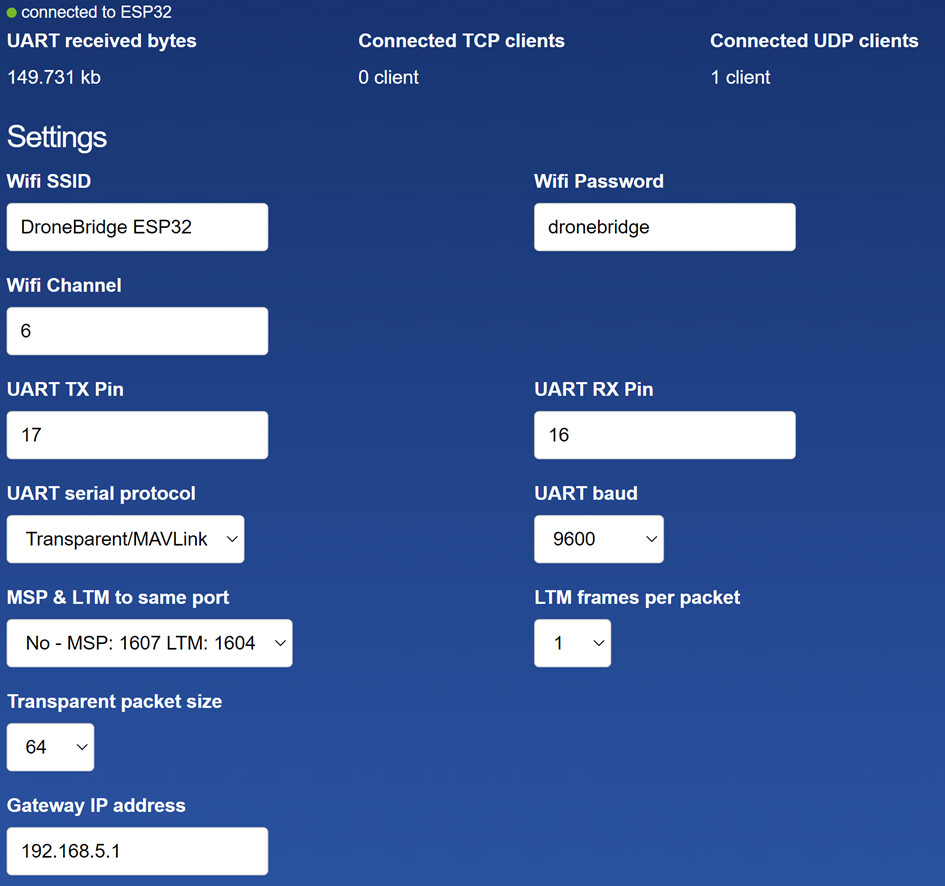

I will now have a look at Yuri’s github.
This error occurs when you use UDP port 14550 for a manual initiated connection. Missionplanner is listening on port 14550 for incoming telemetry all the time, so that port is open and used already. If Dronebridge is configured to use port 14550 and Missionplanner does not pick up the telemetry by itself (without clicking connect), then there is no valid telemetry stream.
Did you try to connect to the TCP server on port 5760?
Change them both to 115k if you can. it is a higher data rate. It may result in dropped packets down the road. (I don’t think this is the current issue)
If this is correct:
MUCK with or find docs for the MSP & LTM to same port setting. It looks like if you flip that button it will say YES and you can send both mavlink and telemetry down the same ports (which to add confusion MSP abbreviation is also used multiplexing) I think MSP in this instance stands for Mavlink and LTM is the telemetry and the numbers after them are the respective ports. IF missionplanner is expecting to connnect to 14550, then I would guess and set the MSP value to 14550.
ESP32 is better and faster than esp8266?
Hi,
I am also trying to install dronebridge to esp32 but after flashing it with binary files which are given in this link ESP32 WiFi telemetry — Copter documentation . My esp32 wont gets flashed can you guide me how to do that?
Can anyone tell after flashing the firmware of dronebridge on esp 32 what should i do next the manual says to connect the telem1 of pixhawk with esp32 rx tx and gnd vcc then i am stuck cant move further ahead