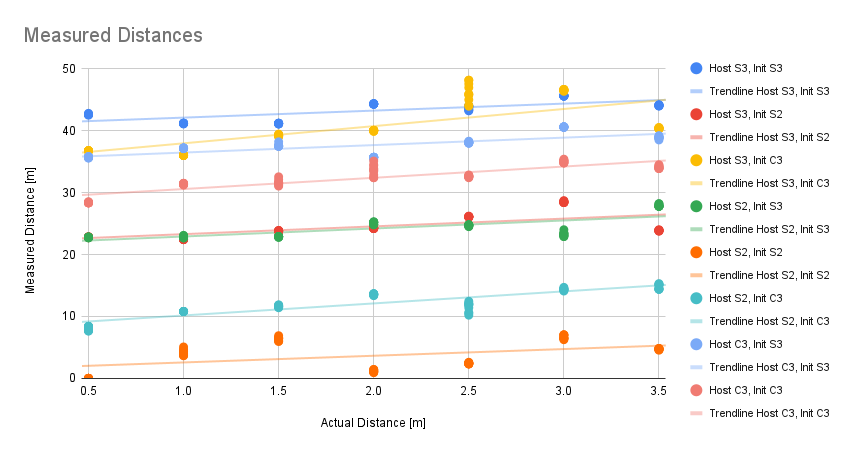
got the Arduino example running on a pair of esp32 S2 mini boards and the results are ok, I have it set on the floor at 4m, its not terribly accurate at 4 meters but if it can hold ±1m over several hundred meters then it could still be useful.
It also seems to have a strange bug where it offline after a while, im going to try it with an esp32 C3 and see if it does the same.
FTM Estimate: Distance: 4.42 m, Return Time: 29 ns
FTM Estimate: Distance: 4.55 m, Return Time: 30 ns
FTM Estimate: Distance: 4.55 m, Return Time: 30 ns
FTM Estimate: Distance: 4.42 m, Return Time: 29 ns
FTM Estimate: Distance: 4.42 m, Return Time: 29 ns
FTM Estimate: Distance: 4.29 m, Return Time: 28 ns
FTM Estimate: Distance: 4.42 m, Return Time: 29 ns
FTM Estimate: Distance: 4.55 m, Return Time: 30 ns
FTM Estimate: Distance: 4.55 m, Return Time: 30 ns
FTM Estimate: Distance: 4.55 m, Return Time: 30 ns
FTM Estimate: Distance: 4.42 m, Return Time: 29 ns
FTM Estimate: Distance: 4.55 m, Return Time: 30 ns
FTM Estimate: Distance: 4.68 m, Return Time: 31 ns
FTM Estimate: Distance: 4.55 m, Return Time: 30 ns
FTM Estimate: Distance: 4.55 m, Return Time: 30 ns
FTM Estimate: Distance: 4.55 m, Return Time: 30 ns
FTM Estimate: Distance: 4.55 m, Return Time: 30 ns
FTM Estimate: Distance: 4.42 m, Return Time: 29 ns
FTM Estimate: Distance: 4.42 m, Return Time: 29 ns
FTM Estimate: Distance: 4.55 m, Return Time: 30 ns
FTM Estimate: Distance: 4.42 m, Return Time: 29 ns
FTM Estimate: Distance: 4.55 m, Return Time: 30 ns
FTM Estimate: Distance: 4.68 m, Return Time: 31 ns
FTM Estimate: Distance: 4.55 m, Return Time: 30 ns
FTM Estimate: Distance: 4.42 m, Return Time: 29 ns
FTM Estimate: Distance: 4.29 m, Return Time: 28 ns
FTM Estimate: Distance: 4.29 m, Return Time: 28 ns
FTM Estimate: Distance: 4.42 m, Return Time: 29 ns
FTM Estimate: Distance: 4.42 m, Return Time: 29 ns
FTM Estimate: Distance: 4.42 m, Return Time: 29 ns
FTM Estimate: Distance: 4.42 m, Return Time: 29 ns
FTM Estimate: Distance: 4.42 m, Return Time: 29 ns
FTM Estimate: Distance: 4.42 m, Return Time: 29 ns
FTM Estimate: Distance: 4.42 m, Return Time: 29 ns
FTM Estimate: Distance: 4.55 m, Return Time: 30 ns
FTM Estimate: Distance: 4.55 m, Return Time: 30 ns
FTM Estimate: Distance: 4.42 m, Return Time: 29 ns
FTM Estimate: Distance: 4.42 m, Return Time: 29 ns
FTM Estimate: Distance: 4.42 m, Return Time: 29 ns
FTM Estimate: Distance: 4.42 m, Return Time: 29 ns
FTM Estimate: Distance: 4.55 m, Return Time: 30 ns
FTM Estimate: Distance: 4.55 m, Return Time: 30 ns
FTM Estimate: Distance: 4.68 m, Return Time: 31 ns
FTM Estimate: Distance: 4.55 m, Return Time: 30 ns
FTM Estimate: Distance: 4.55 m, Return Time: 30 ns
FTM Estimate: Distance: 4.55 m, Return Time: 30 ns
FTM Estimate: Distance: 4.55 m, Return Time: 30 ns
FTM Estimate: Distance: 4.42 m, Return Time: 29 ns
FTM Estimate: Distance: 4.42 m, Return Time: 29 ns
FTM Estimate: Distance: 4.42 m, Return Time: 29 ns
FTM Estimate: Distance: 4.42 m, Return Time: 29 ns
FTM Estimate: Distance: 4.55 m, Return Time: 30 ns
FTM Estimate: Distance: 4.55 m, Return Time: 30 ns