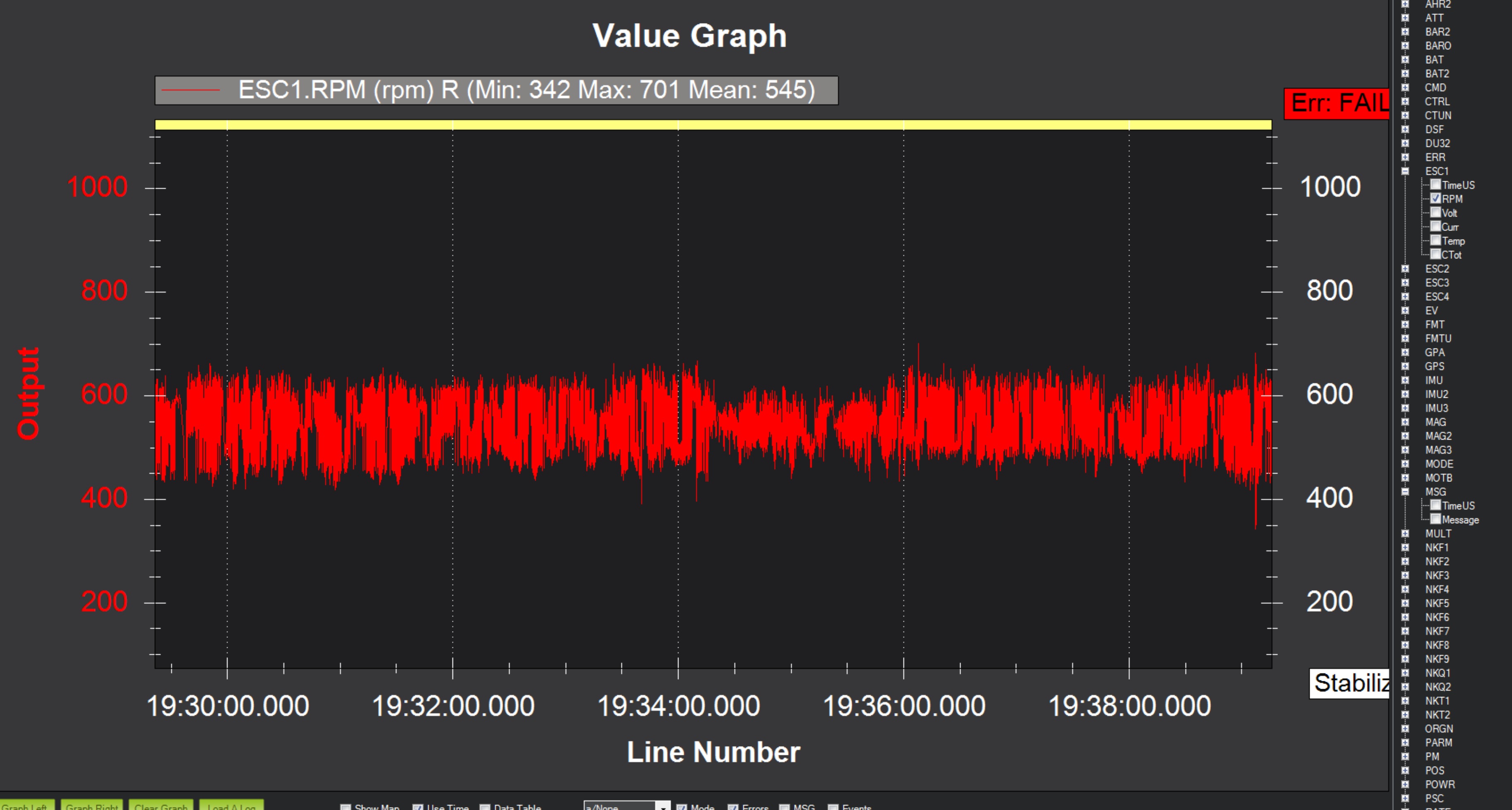
My F55A Tmotor is reporting an average eRPM of 545. I understand to get the correct true RPM you divide by (motor poles/2). My motors have 28 poles so this gives 39. Im expecting an RPM around 3800. Ive written to the ESC manufacturer asking if the ESC reports eRPM/100 but thought it could possibly be a Mission planner function to /100?
I think I’ve just managed to get this working on my setup, where the transformation is:
RPM = telem14(14/P)
i.e, 545*7 = 3815 RPM for your setup.
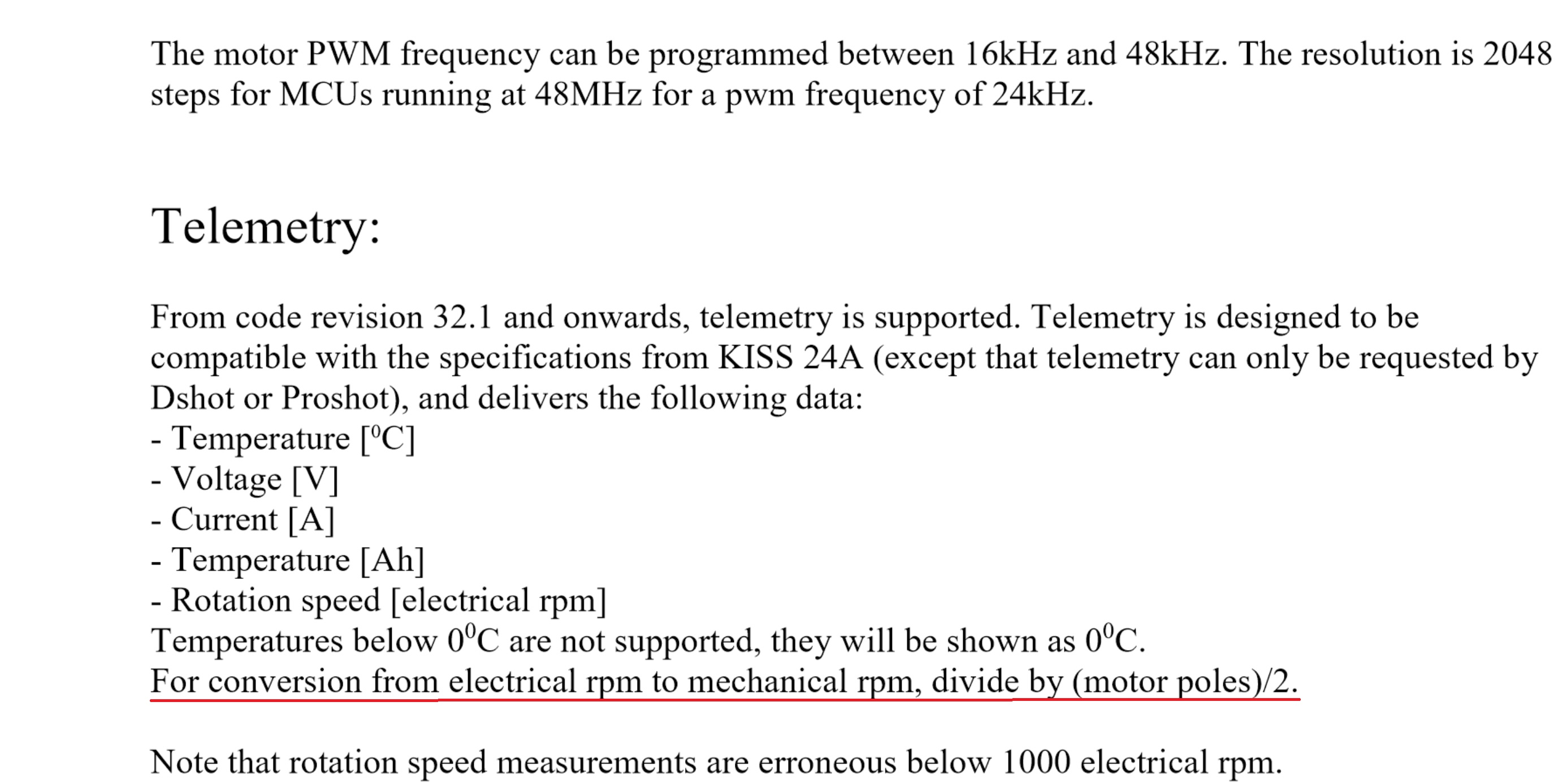
This gives me the expected values for both my 14P and 28P motors, and makes sense that the 28P motors require twice the eRPM for the equivalent to the 14P. But I’m not sure what the original scaling of the telem values is and why.
I’m hoping someone can still clear this up.
This is from the BLHeli32 manual. As you say, Ive also seen many people say the ‘default’ is 14 pole so use the calculation as you show. Your method gives me 3815 and my method 3892. Close but probably just by accident. Nowhere have I seen info saying its /100. It would be good to have a motor parameter in ardupilot that output true motor rpm.