Hi,
We are using a DYS 30A ESC with mikrokopter motors on hexacopter with Vrbrain. We have done ESC, compass, acc calibration. and finally the autotune for all axes. With this the hexacopter flew well, without any issues. The problem starts when we add a gimbal (sorry we don’t have the log because the micro SD card broke down, with the crash). Before the crash we can ear one motor stop and after the crash the esc make the song the calibration.
We already replace the motor, checked the solders, tested the ESC with a PWM generator to see if it fails, but nothing yet. If you need more information please let me know
Hi,
Some help please
Thanks
We had a problem with our hexacopter and we had to wait a long time to get in fly again and now we have a log with this problem. We already changed the PIDs values and the error rate ralues but the problem still there, and this only happen when the current is high ~100A. We have check the solders and changed the ESCs and motors.
You can download the log here:
https://drive.google.com/open?id=1u7n2ymNcfQPjs2v2-nqwgW4UjGeGdtf1
Thank you
Your copter is overweight/underpowered
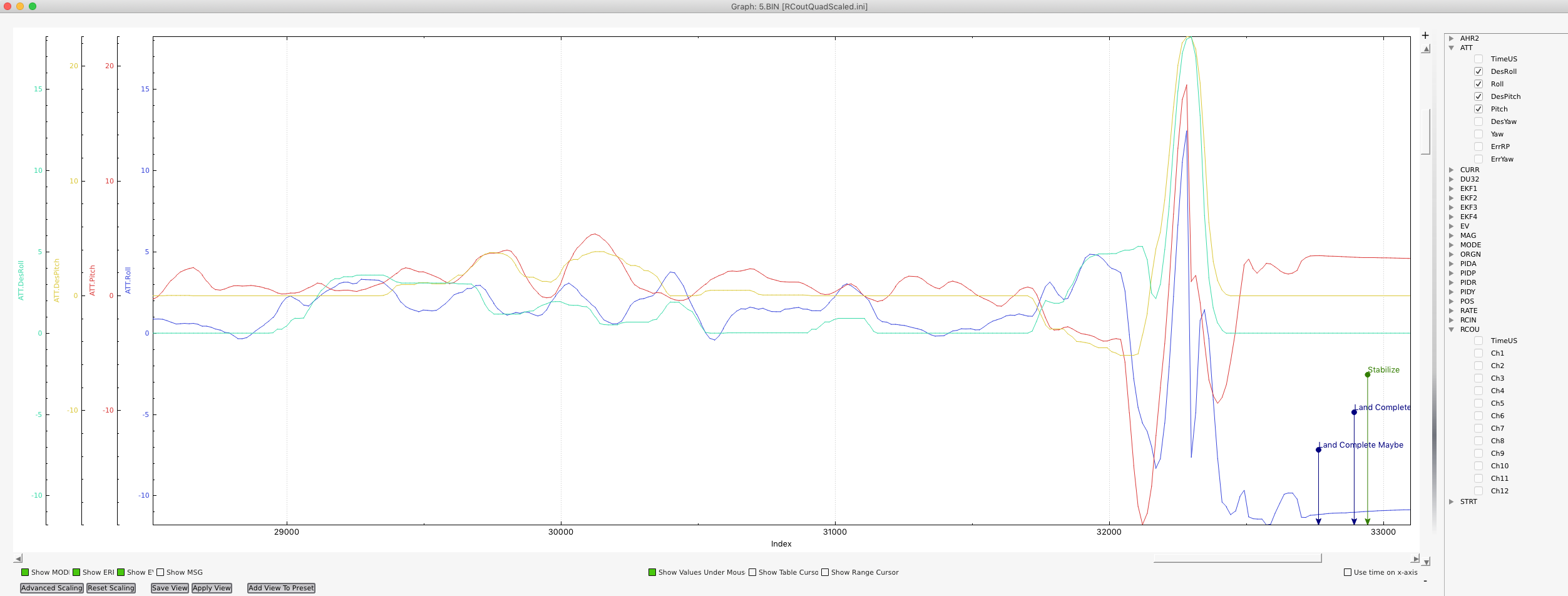
Motor3 quit on you, probably due to overheated/overloaded ESC
Your flying at an average PWM output of around 1800 which is the maximum, leaving very little headroom for stability.

It may appear to fly well now but any disturbances and things are going to get messy.
1 Like
Thank you for your reply @mboland.
We have 2 batteries of 8000mAh 4s 10C
DYS 30A ESC
Mikrokopter 3638 motor
and the copter weight is about 5kg without the camera. This configuration shouldn’t be enough?
I have made a thrust test with the copter and what I notice is that when the throttle is about 75% the voltage drops very quickly like goes from 16V to 13V in 3 or 4 seconds. Any suggestions?
Thanks
The problem was that the copper on my power distribution board was too small. Now the voltage is more stable. But I have the same problem, the copter reaches the 1800 with 7kg (with the copter weight). I tought that, with my configuration, the copter would fly with no problem. Can any one help? Thanks
What props are you currently using? And what size frame across the widest point (or between motor centres) ?
Just about anything I plug into ecalc using what details there is in your previous posts and a few guesses, gives overcurrent for those motors and ESCs.
You might be able to get away with really good 40amp ESC’s, but more likely you’ll need at least 50amp ESC’s.
The motors are over current and over power with several prop sizes and even after I lower the all up weight.
Hi @xfacta thank you for your help. We are using fiber carbon Multirotor 14x4.7 propellers, and the size frame is 1.10m.
With the right parameters on the ecalc and I see what you are saying and we really need to make a upgrade to 40amp or maybe 50amp ESC’s.
But dont race out and buy new ESCs yet - those motors are drawing too much current in this application. You first need to find the correct motors and you might find those ESCs are OK.