Hi, please direct me to a correct direction as I am a total noob in this.
I know motor esc connection direction and their order as per pixhawk flight controller.
This is my first time using this type of flight controller, just needed a heads up.
I am using Kakute h7 miniv1.3 flight controller (FC) and 4in 1 esc stack.
Flashed the ardupilot firmware on it.
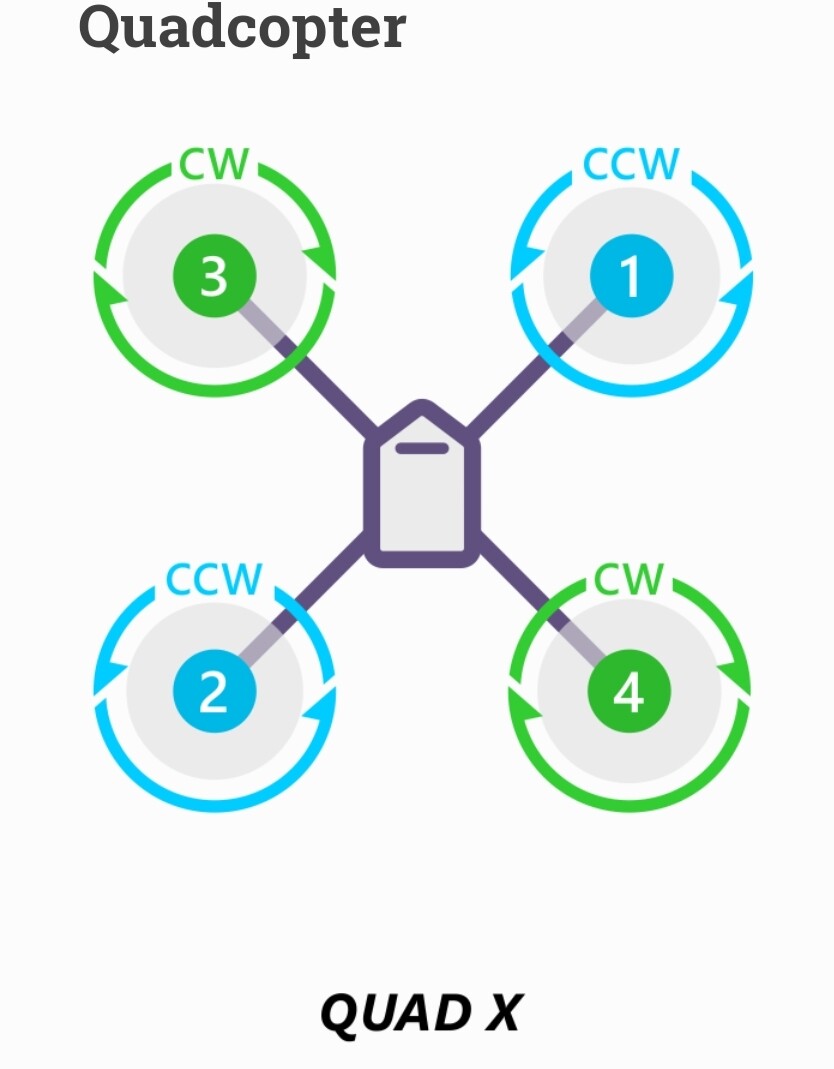
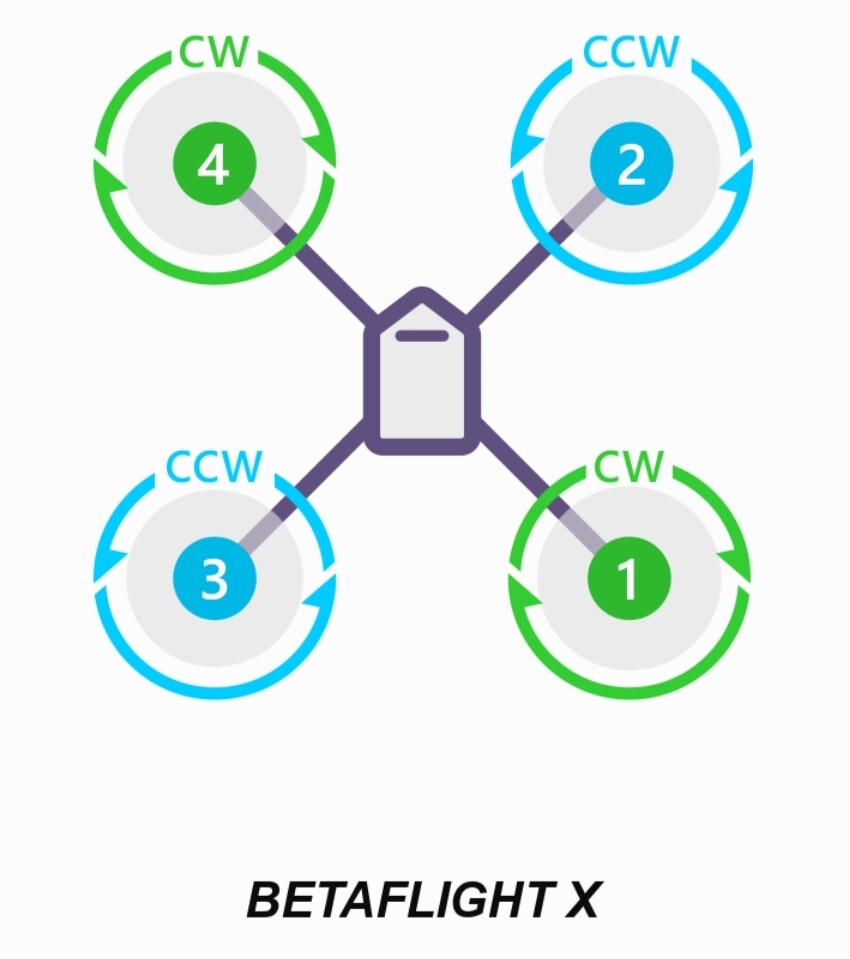
The question is that, shall I follow the ardupilot X configuration and connect esc signal connection to the FC or shall I use the configuration as per betaflight X.
Any clarification or any help in any direction will be helpful.