Hello,
i would like to build an ‘Agricolture’ hexacopter.
I have already built the frame (with aluminium and 3d printed parts), now i have bought some motors:
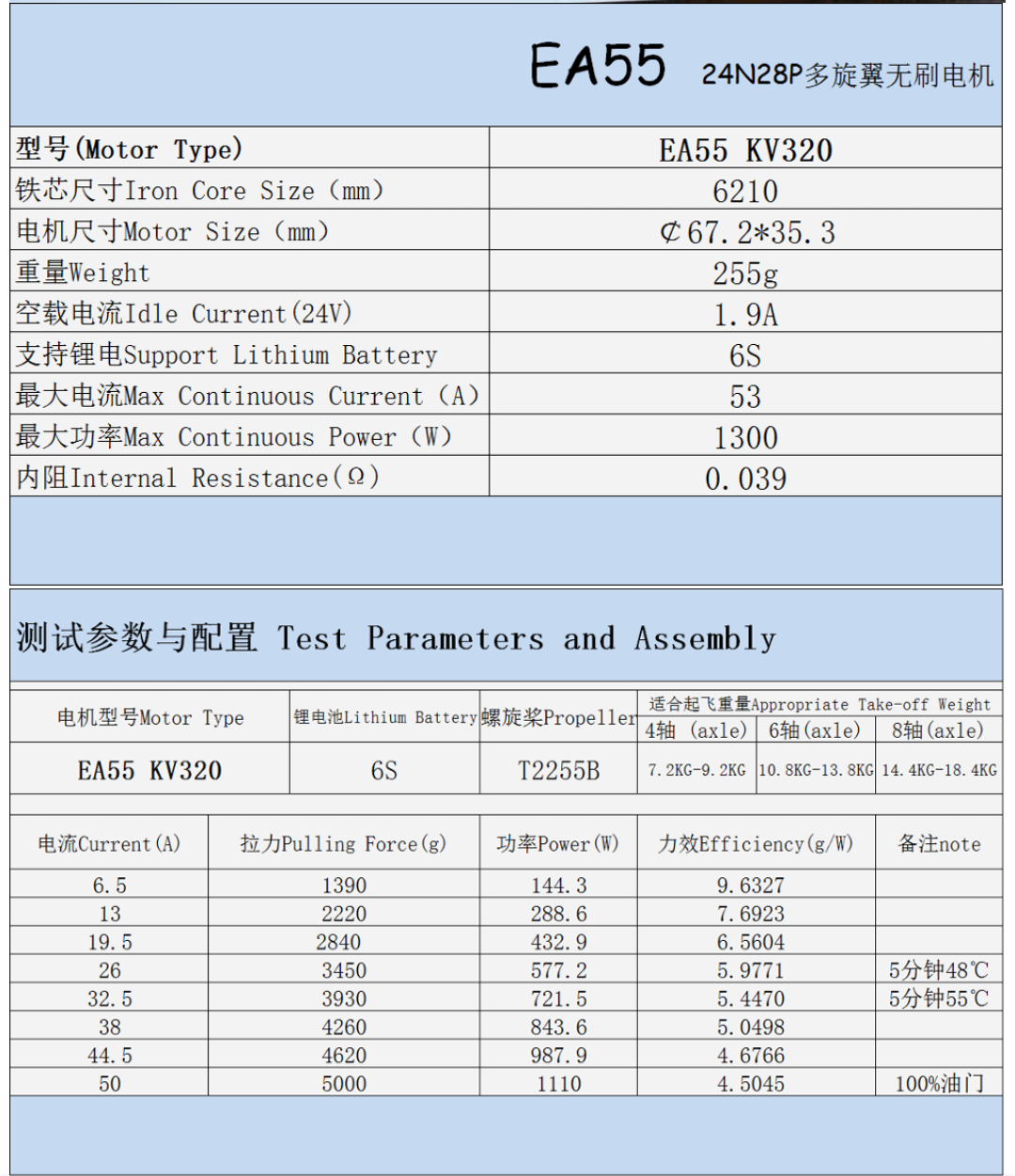
Eaglepower EA55, whose specs you can see below.
Now i am going to buy the ESCs for these motors.
The specs indicates 53A maximum current, so i though to buy some 60A ESC.
Do you think 60A are enough or it is better an 80A?
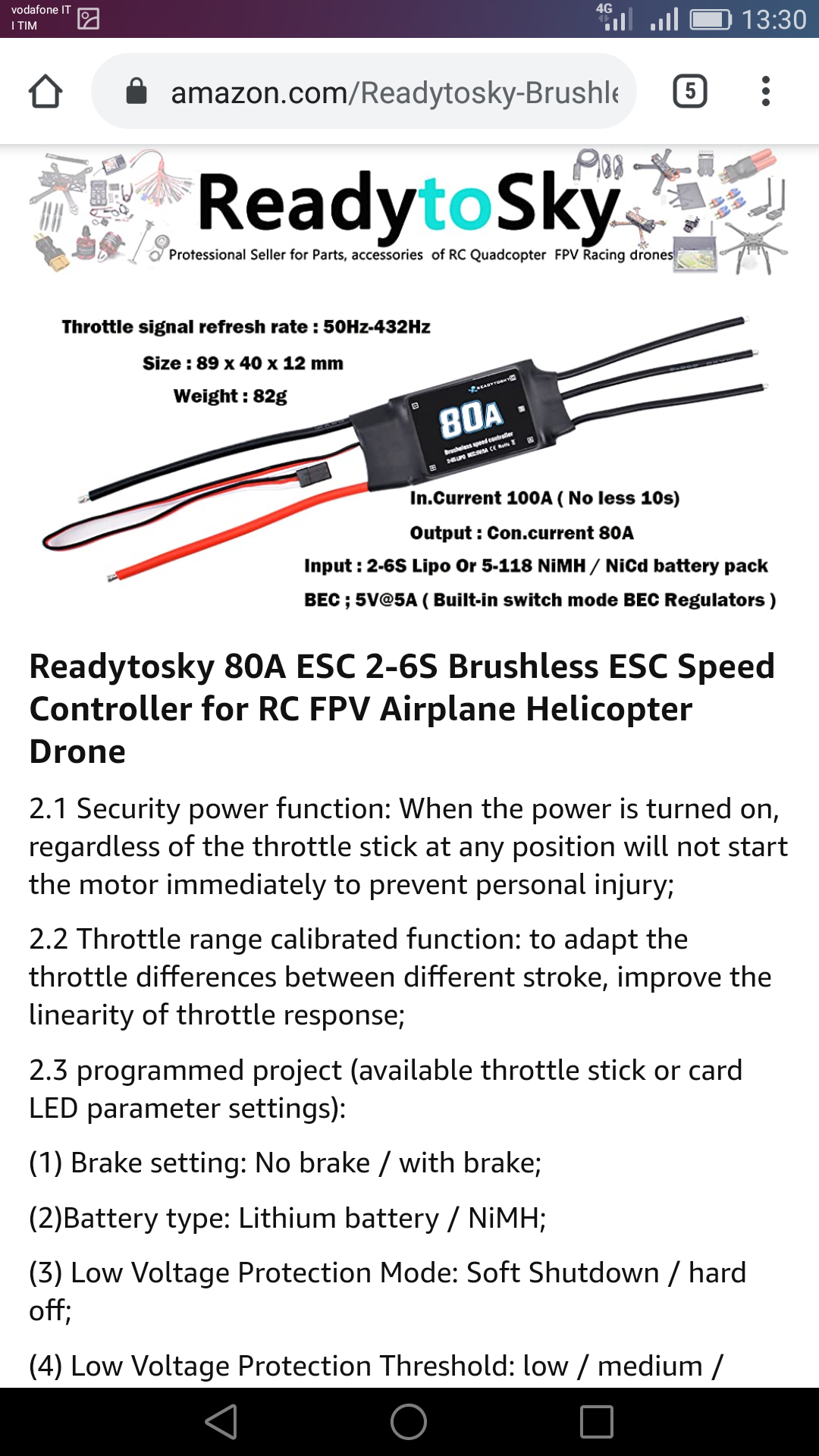
By the way, i found an offer on Aliexpress fo 80A ESC , brand ReadyToSky, whose specs you can see below.
Those motors are not well known, so dont count on reliability right away.
But for motors that can draw 50amps continuous I’d be considering the Hobbywing Xrotor Pro ESCs, the Pro 50A would probably do the job.
If you had T-Motors then I’d be recommending the t-Motor Flame ESC I suppose, but then again you would probably buy them with the motors and get them pre-configured.
Some Ag hexacopter swinging 22inch props doesn’t sound like a play thing. You might need to go for good quality components, especially if carrying heavy or expensive payloads.
Many of the ESCs you find on AliExpress and Bangood wont have the real peak current handling, or even the continuous current that they state. Amazon might be the same, or different - depending on the supplier. Most are cheap copies of something else. I’ve seen where people buy Hobbywing ESCs from those sites and they are copies that dont work as planned!
It’s certainly OK to buy from those sites provided you know what to expect.
Really, you should get an ecalc subscription, it’s dirt cheap, and put in some figures and see what motors,props and batteries you can really need to use. https://www.ecalc.ch/xcoptercalc.php
Thank you very much for the support
YES, i use ECALC (i got only a monthly subscription for now)
I bought the motors and propellers basing on the results of some simulations with ECALC.
I have an agricultural farm and would like to build a multicopter that fits with my needs.
I thought to begin with a 6kg payload hexacopter, with frame designed by me with Fusion 360.
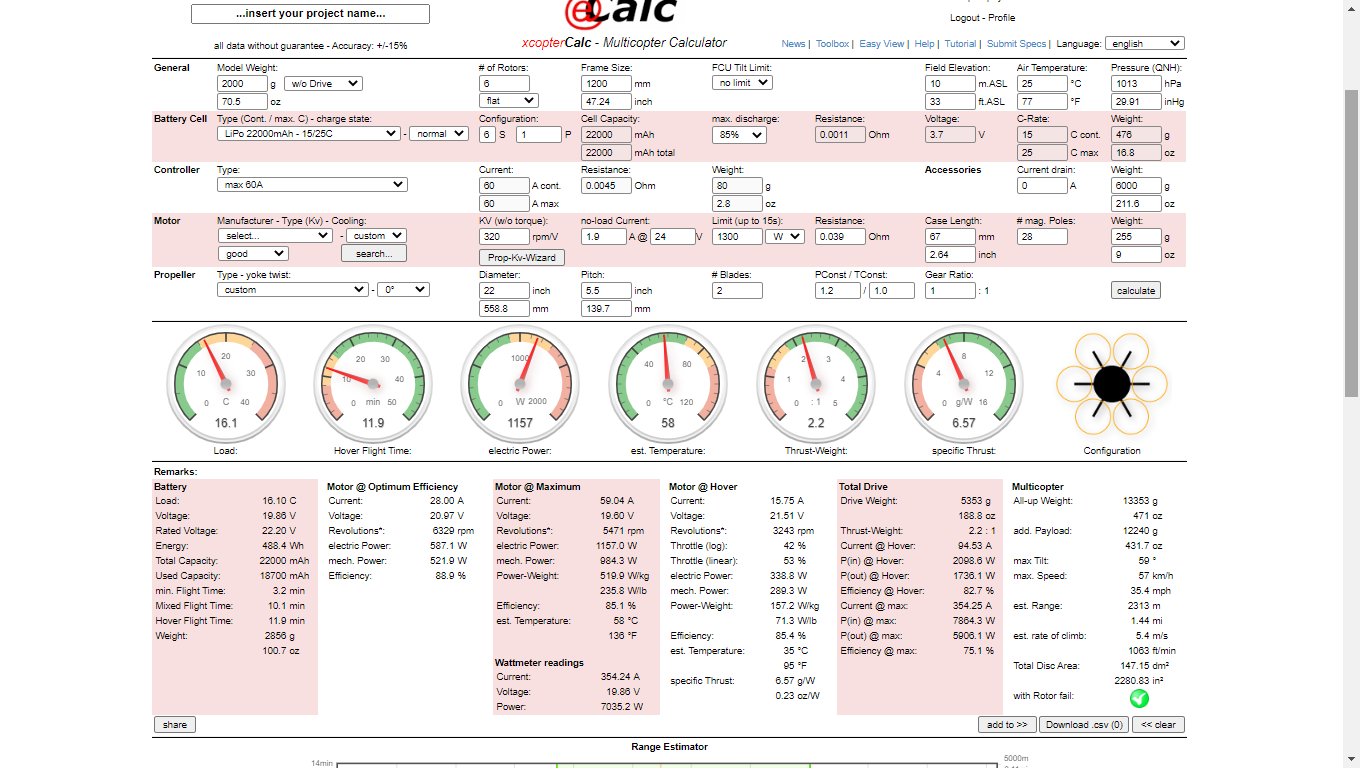
This is an example simulation where the custom motor parameters are got from the EaglePower EA55 specification:
I bought 24mm diam aluminium tubing for the arms and 2 aluminium plates for the central body.
Then 3d printed in ABS/ASA the internal structure that holds the arms between the plates.
The frame weight , including the landing legs weight (missing in the picture) is about 2000g, as you can see in the ECALC parameters.
The payload 6000g, as you can see.
This gives about 11.9 min hovering time, but i think it should be more than this because the weight of the payload should decrease while the content of the tank is spreaded out.
I have some doubts about the dimension of the arms:
as you can see in ECALC, i set a Frame size of 1200mm, to keep the arms as short as possible to increase rigidity of the whole, but this gives a distance between the tips of the propellers of about 42mm… this could be enough or a greater distance would be desiderable?
Now i am going to buy the pixhawk flight controller and the appropriate ESCs.
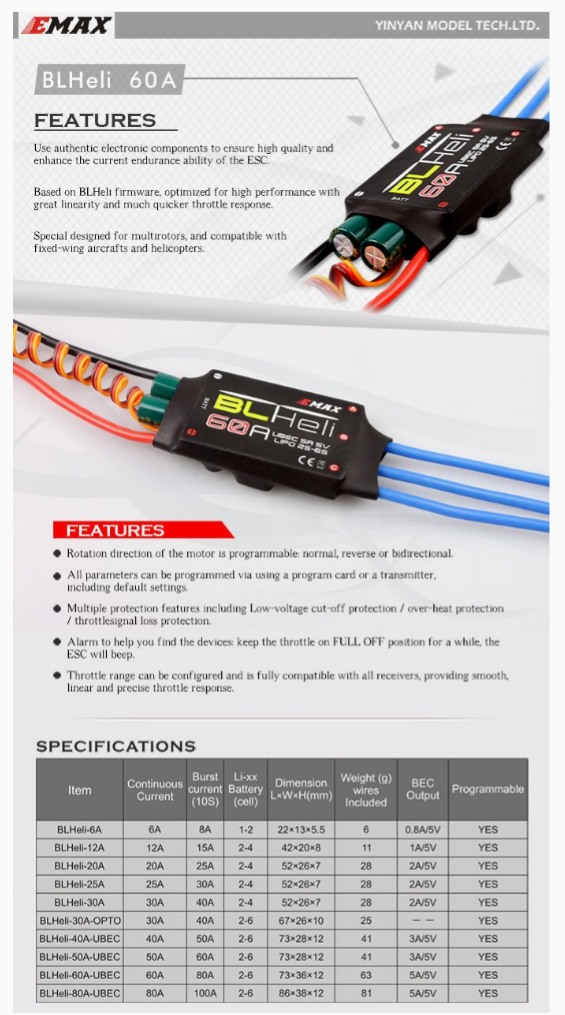
As you can see, ECALC says that 60A ESC can be enough for that motor/propeller/battery combination, so i was going to buy the BLheli 60A ESC you see above.
But when i saw the offer for the ReadyToSky 80A i had some doubts if instead it would be better to buy them, so i opened this thread…
I think to go with the 60A BLheli, because of the (trusty and well known?) firmware and the possibility to fix the ESC behaviour basing on my specific needs…
What do you think?
Any suggestion is appreciated…
Thank you!
you will want to use the HV escs. The only thing I haven’t been able to figure out is the extra signal wires, the ones on ali epresss, and alibaba have extra signal cables and I don’t know what those are for maybe to also plug into the reciever or there just different from the optos. The hobbywing 60amp pro work for my quad, but im throwing 80 amp hv esc’s with a 480 amp PDB in the 1650 hexi Im building. the xrotor pro 80amp should do for me, no extra signal wires, just fan hook up, and signal to the flight controller.
Just a PSA, I would not expect eCalc to be very accurate with drones of these sizes, it is important to remember it uses some rather simplistic (compared to what is really happening at least) simplifications to get its results, and they don’t seem to scale well. Although at least it usually underestimates flight time / over estimates current draw. Not saying you should not use it but only use it to compare with itself. (an example of how far off it can be it estimated current draw on a drone I recently built to be at hover to be more than 2x what it really is).
Hola, a mi modo de ver con estos motores poderosos lo importante es saber cuanto peso vas a levantar ? si es un quad divide entre 4 y busca el numero de amperios equivalente
por ejemplo si quiere levantar 1330 por motor con un esc de 50 A es suficiente ya que necesitarías 6.5 A suficiente máximo 20 amperios . pero si vas a levantar 5 kilos por motor necesitarias un esc de unos 100 A