I don’t have any experience with either of those brands so I won’t try to guess which is better. However…
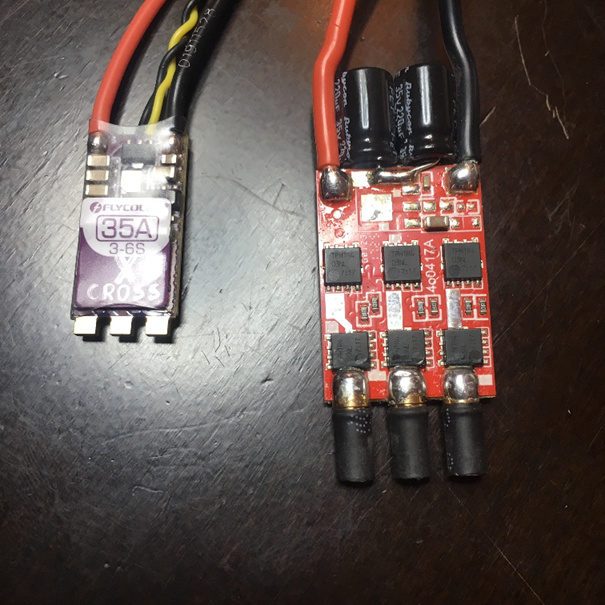
The Arris ESCs have capacitors and are opto-isolated, which is generally a good feature for larger drones (or drones with long wires). This is because the DC power lines are prone to large voltage spikes from the line inductance. During rapid throttle changes, the DC lines see large current changes which cause the line inductance to create magnetic fields that oppose the changing current. This causes problems with the rising current as the current lags the voltage, and the capacitors make up for the lagging current by supplying the line with the little bit of energy they have. And when the current is decreasing, the line inductance forms a magnetic field that tries to fight the decreasing current. This creates a voltage spike that can damage unprotected circuitry. Wire inductance increases as the wire gets longer, so that is why it is generally good practice to try to make your ESC input wires short.
This doesn’t mean the Arris ESC’s are better, but they are probably designed to be used in larger drones than the Flycolor ones.
I build drones with similar motors and props, and I use KDE Direct or T-Motor for ESCs and motor. For example, KDE 4012-400 or 4014-380, and T-motor MN501S with Alpha ESCs.
Both brands have very good hardware, but are more expensive than other brands. I think T-motor Alpha ESCs are slightly better, but KDE will soon have CAN communication for ESCs of this size, which will be nice.
The downside of these brands is that they use proprietary ESC firmware, which means no BLHeli, which is probably the best ESC firmware out there for multirotors. But I use KDE and T-Motor because I build drones for customers and the hardware needs to be robust; the high-performance benefits of BLHeli are not really relevant to agriculture and survey drones.
I have those Flycolor ESCs…and I just ordered 6 more. As a matter of fact I just ordered 6 of the motors you listed as well for my new Tarot 680pro frame.
What flight controller are you using? And what type of craft? Depending on your FC you could run Dshot which is a digital signal to the ESCs from the FC
I have those ESCs and the 4006 motors in a 650 frame and run Dshot300 ESC protocol from my CUAV nano.
Also the Arris ones use Simonk firmware (old) vs the new cool BLheli firmware in the flycolor
Also, I don’t think there is any issue with those ESC’s. They shouldn’t be any different than other BLHeli32 ESC’s as far as signal requirement goes. If the motors are “not very smooth” I would suggest it’s for another reason.
Nop, they rathle at the moment of the aceleration and then works fine. This produce in flight very high vibrations, the cliping on one of the imus when I went forward very too much.
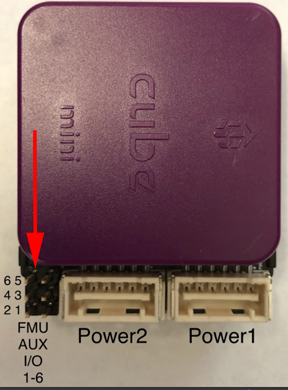
I have fixed using and orange cube and chanhing the PWM voltage to 5V