Yes, you can lower the throttle curve points at your needs (very specific to your battery/motor/pinion setup).
I see the RPM signal is coming from GPIO, so did you use the ESC output or an external Hall sensor?
The 3000 rev/min is the rotor measured speed, correct?
I perform initial tuning of the throttle curve as follows:
Main rotor collective angles of attack are (for a two blade rotor head):
collective stick fully up 10degs
collective stick middle position 5.5degs
collective stick bottom -5degs
RSC_MODE set to 3 (so no governor at this stage yet);
Stabilize flight mode;
“first guess” throttle curve should satisfy the following requirements:
-in hover condition measured rpm must be at target rpm (H_RSC_GOV_RPM) with a tolerance of
+/- 10 rpm, (set H_RSC_THRCRV_50 accordingly)
-with the helicopter sitting on the ground and collective fully down measured rpm must be >
(H_RSC_GOV_RPM - H_RSC_GOV_RANGE/2) (set H_RSC_THRCRV_0 accordingly)
-perform a max performance climbout, collective stick around 80% /90%, measured rpm must be at
target rpm (H_RSC_GOV_RPM) with a tolerance of +/- 10 rpm, (set H_RSC_THRCRV_75/100
accordingly)
Throttle curve is used for feed-forward when in governed mode, it is very important to have it set correctly, not only as emergency fall-back in case of governor fail.
I am using the RPM out from the ESC. I “calibrated” the RPM multiplier with this tachometer. Yes, 3000 RPM is the speed off the tips of the prop.
I have my max angles set to 12 and -2. That comes from the ArduPilot docs. So, mine would be less aggressive, yes?
I’m not sure what that number should be. You have it 1300. I’ve read 2500 somewhere. I am getting better at understanding throttle curves, so, as I understand, the faster the blade, the more responsive the craft becomes. I’ll leave it at 1300.
Setup requires some flight? Is it good practice to tether the heli so it doesn’t take off?
This is the setpoint of the speed governor, i.e. the desired main rotor revolutions per minute when using internal governor (H_RSC_MODE_4). It depends on the helicopter manufacturer recommendations and the flight style you will do. Normally the manuf. recommends different headspeeds for normal/sport flying, mild 3D and hard 3D flying. You need to tune the throttle curve around the headspeed value (H_RSC_GOV_RPM) you will use after enabling the internal governor.
Which helicopter is it, 3000rpm might be extremely high.
well… yes, setting up the throttle curve requires a couple of flights. It is possible to constrain the heli on the ground but is a dangerous practice, you need to be sure the structure and skids are stiff enough to protect against resonances. I definitely wouldn’t do that.
That 3000 was never planned nor desired. That’s why I needed to understand the curve; my target was 1300. I understand now. The craft is a soxos strike 7.1. Heli-Professionals responded and said the head speed should be between 1100 and 2400.
Since maximum recommended rpm were exceeded by so much, ask the manufacturer for inspection to carry out and replacement of bolts and bearings. Do not fly till you hear back from the manufacturer what to do after this overspeed.
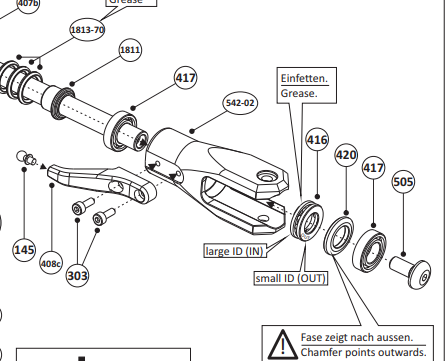
@davidbitton hmmm I don’t like the answer they got you. I would suggest to replace the spindle bolts, washers and axial bearings for both main rotor and tail rotor. It’s a few bucks but worth replacing. Also check main rotor blade balance (CofG migration), spanwise position must be the same for both blades.
edit: use original spares when looking for bolts and stuff, don’t rely on local brico shop hardware.
I can hold my fingers under the blades and the craft is level front to back; CG is at the shaft. What do you mean by spanwise? Do you mean blades out the left and right sides? As for spindle screws, are you referring to the four screws on the bottom and the four on top that hold down the flange bearings? Thanks.
I think he means take blades off and make sure that each blade balances in the same part of the blade them selves. Or that each blades center of gravity is the same. Iv seen where some people do this for blade balancing. I don’t really understand how and over speed would change this though.
I’m relative noob to rc heli but just taking the main shaft out and balancing the blades all on the head seems adequate to me. My heli are all small though compered to yours and I only use fiber glass or carbon fiber blades that balance out a lot easier that some other materials.
One other thought, if you can over speed your rotor enough to the damage Ferrosan is talking about you are not geared properly I don’t think. Thats leaving power on the table if you can never go to 100% throttle isn’t it? I mean the rotor should hold up to quite a bit higher RPM than you would normally fly at so if you are over speed enough to cause damage than normal flight throttle must be like 50% or something?
Depending on rotor blade type and brand there might be lead weights inside, they are basically epoxied in while laminating. I doubt these blades were designed for such high rotor speed (even in hard 3D on the 700 class RPM are usually around 2200). I suggested to perform this quick check just to be sure nothing moved inside the blade as consequence of the high centrifugal load.
I think it is geared properly, but being a 3D machine there is a lot of excess power and going almost full throttle with flat collective pitch can cause such overspeeds.
@Ferrosan i worked on the heli more. At 0% collective, I set the throttle curve to 22%. Something tells me I’m geared wrong. I already reached out to heli-professional.
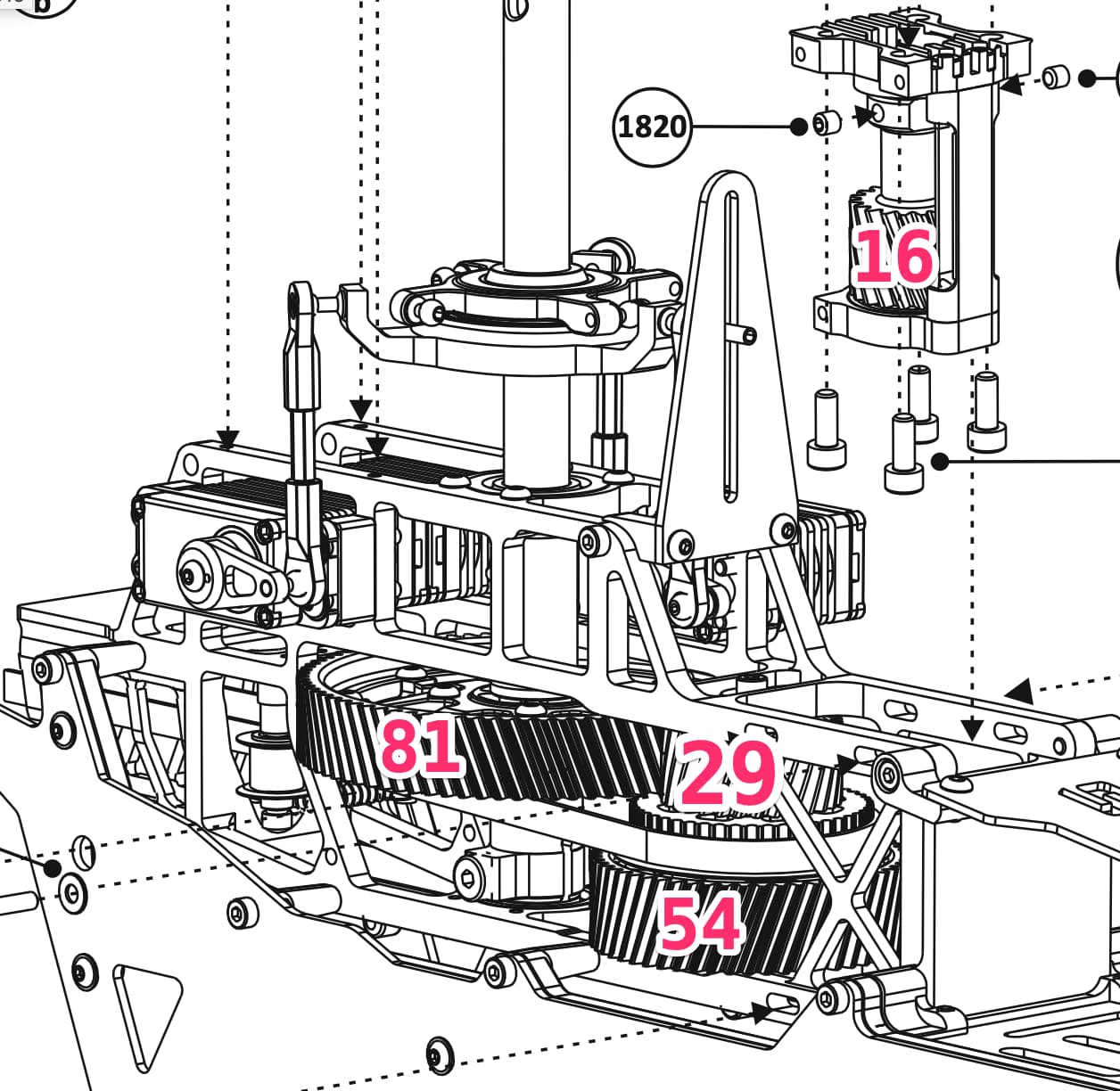
@davidbitton can you provide more details about the build (like motor type and kV, pinion).
Did you buy as a combo kit or did you have to pick components yourself?
How are you checking with the optical tach? If it is reading both blades it will read 2x as high as true rpm (assuming 2 blade heli.
When I verify with a similar optical tach I have a dark floor in the garage that I can put it on and the blades have white on them so if I use the tach over that part it reads one revaluation for each blade passing. If this is how you do it too the tach will read tx true RPM. If using the reflective tape but only on one blade you can still get hits from the other possibly.
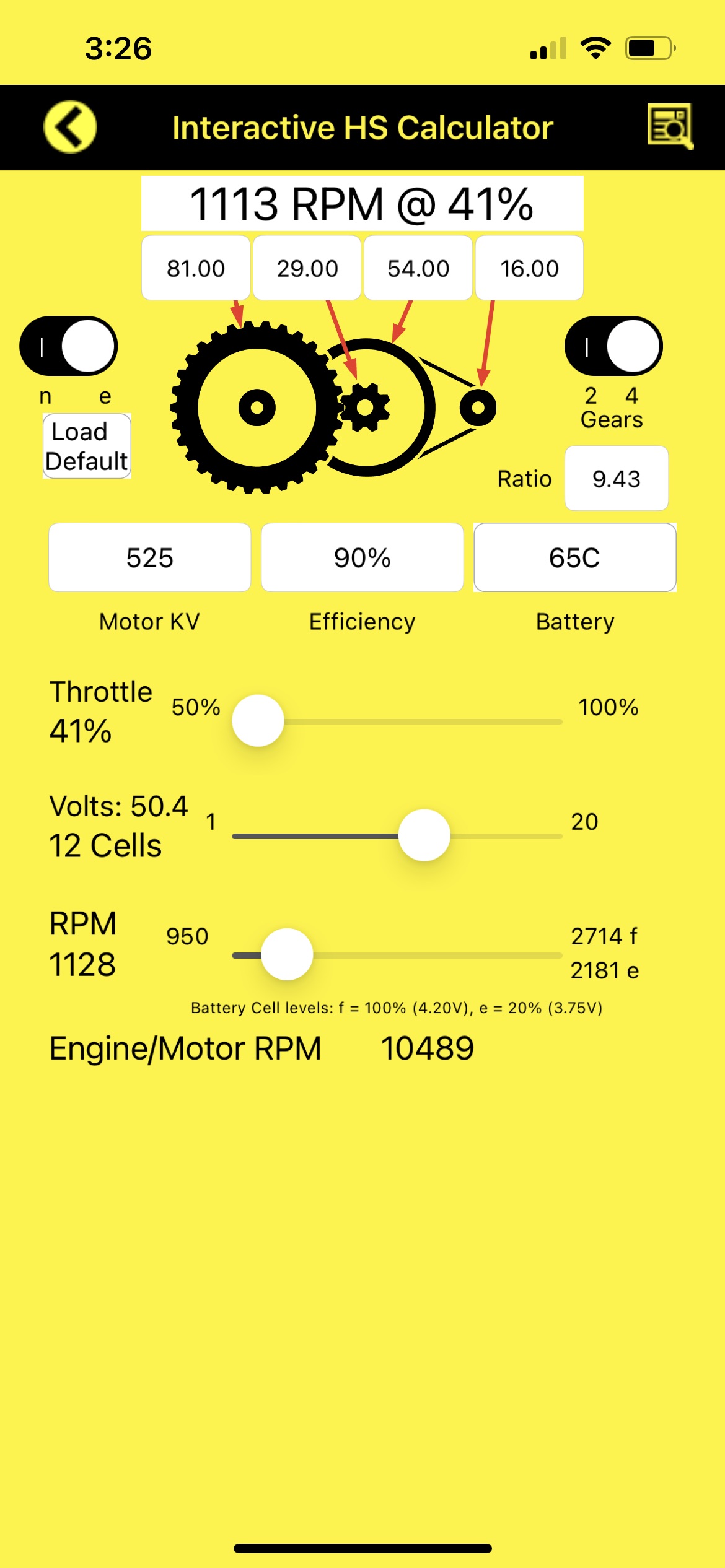
Either way I don’t think the 3000rpm is accurate or even possible with your heli. As I understand it based on the specs above and running though some calculators the maximum head speed you could see on this even with no blades on would be closer to 2600-2700@100% efficiency. That is far less than 3000. Realistically closer to 2500 max at the rated 94% peak efficiency.
um. yeah, the does make sense. no wonder the app showed 41%. Well, sorry for that waste of time. I’ll go back to my throttle curve now. Albeit with egg on my face.