Hi
I have a vtol plane:
remote control: flysky fs-i6. I bought a PWM receiver and do the bonding.https://www.amazon.com/Flysky-Transmitter-Controller-Helicopter-Quadcopter/dp/B07CWBQ2HM?th=1
4 motor: XM5060EA V3 series brushless outrunners for air
4 esc: http://en.dualsky.com/Xcontroller_ESC/summit-100-light.shtml
| MOT_PWM_MIN | 1000 |
|---|---|
| MOT_PWM_MAX | 2000 |
| MOT_THST_EXPO | 0.72 |
| MOT_SPIN_ARM | 0.14 |
| MOT_SPIN_MIN | 0.17 |
| MOT_SPIN_MAX | 0.95 |
I did the ESC calibration through Q_ESC_CAL as recommended here:
https://ardupilot.org/plane/docs/quadplane-esc-calibration.html
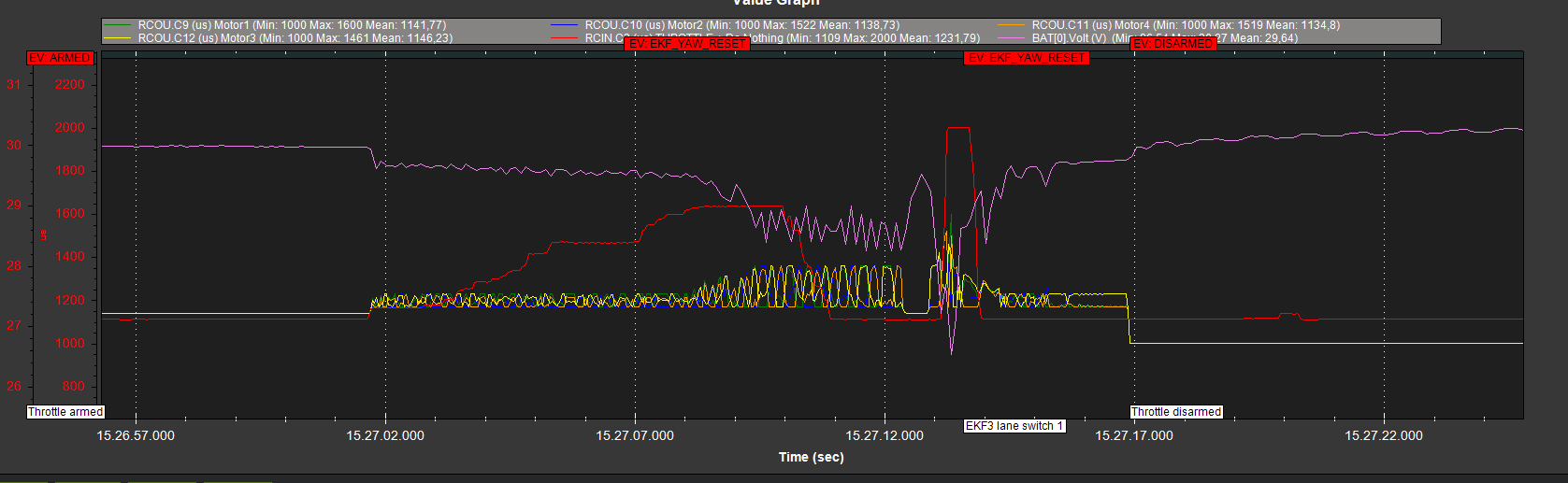
As you can see on the picture when I try to raise or reduce the throttle (red line), the response of the ESC is delayed by a few seconds. I tried to calibrate again the ESC and to play with the above parameter and the thrust curve in the remote, nothing has improved the response behavior. Anyone with a similar problem that could give a hand?
Thank you in advance
best
Pablo