We have been trying to achieve successful autonomous flight for several days but we had too many crashes.
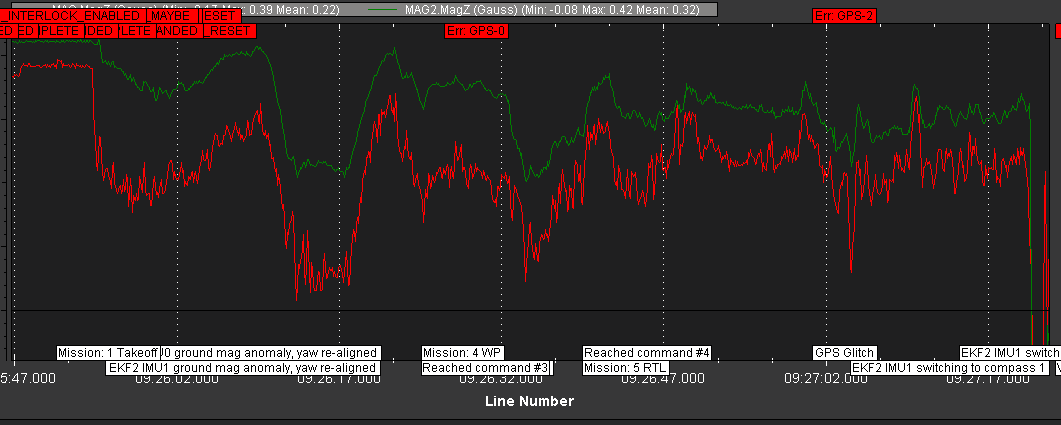
After the take off, we get errors like “EKF2 IMU1 ground mag anomaly, yaw re-aligned”, “GPS Glitch”, “Vibration compensation ON” and messages like “EKF primary changed:1”.
We are new and can not find the problem. I upload a few logs. If you see something we can’t see, it will be very helpful to us.
For the Ground Mag Anomaly it’s probably because you have the Internal Compass as Priority 1. Change the priority to the external one on the Compass Calibration screen.
According to your message, I think the reason may be because of distance between pixhawk and power disturibition board. Because of ESCs cable, PDB is located center of copter and under 3-4 cm below Pixhawk (and there is a carbon fiber plate between them).
After changing GPS with RadioLink SE100 and disabling internal compass, we tried again. It flies and auto mode missions are mostly successful. But we still get “GPS glitch” and “Error velocity variance” error. We increased EKF threshold to prevent failsafe mode when we get velocity variance.
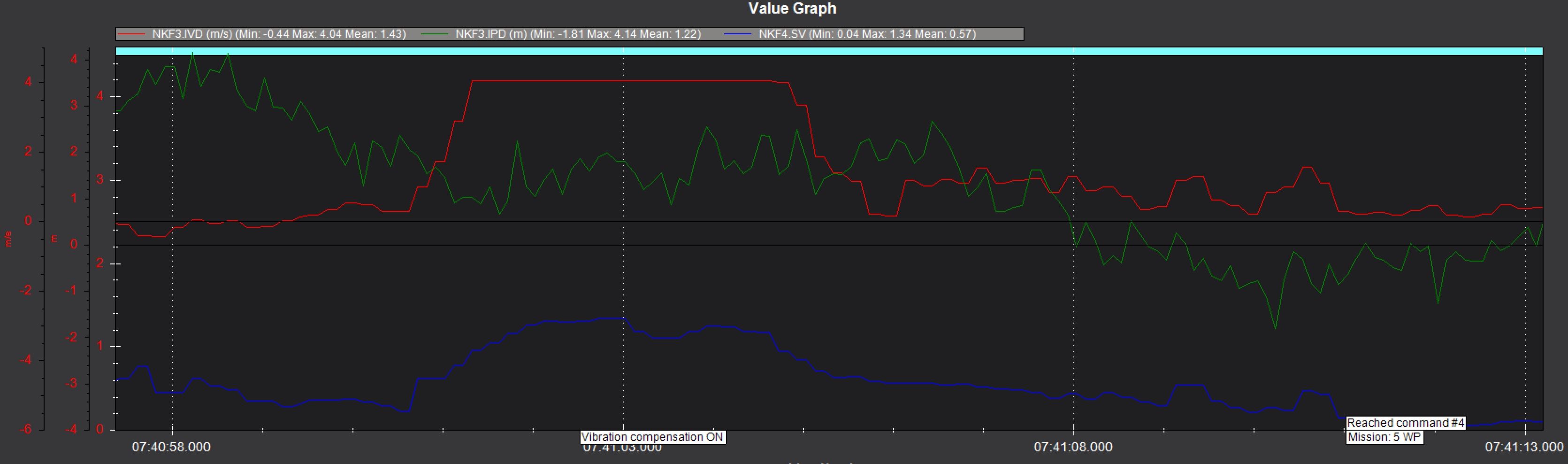
I wouldn’t put a RadioLink product on anything. Those glitches caused a Vibration Compensation Failsafe in one instance and you don’t want that. In this case it wasn’t from Vibration but poor position estimate. Putting a Band-aid on the problem by increasing the EKF threshold is bad idea IMO. The compass on that Module is working well.
This is why Vibe Comp was triggered. You can read about it in the Wiki. I wouldn’t be doing any Auto Missions until this has been fixed.