Hello Everyone,
We have been flying Striver VTOL craft and are not using Airspeed sensor.
I have disabled the airspeed sensor by the following parameter.
ARSPD_USE = 0
ARSPD_TYPE = 0
Q_Assist kicks in when the airspeed goes below 9 m/s.
But the issue is the autopilot is using EKF based(CTUN.As) airspeed estimation which is erroneous at times. Whereas DCM based(CTUN.SAs) estimation is quiet good throughout the flight. How do I force the autopilot to use CTUN.SAs based estimation for Q_assist?
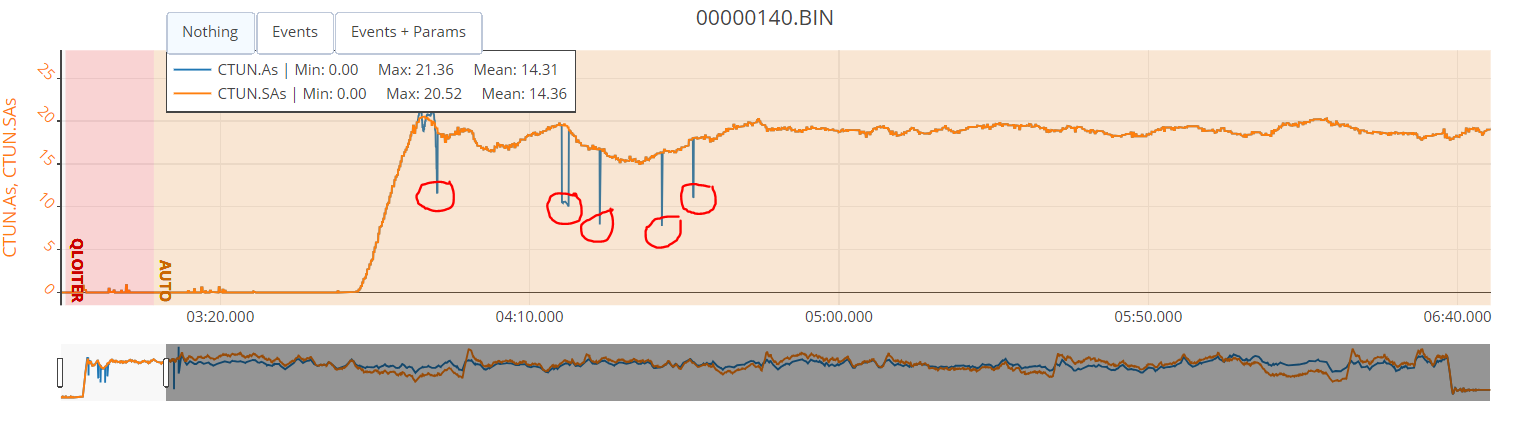
The image above shows a downward spike in CTUN.As reading. Whereas CTUN.SAs reading remains stable all throughout.
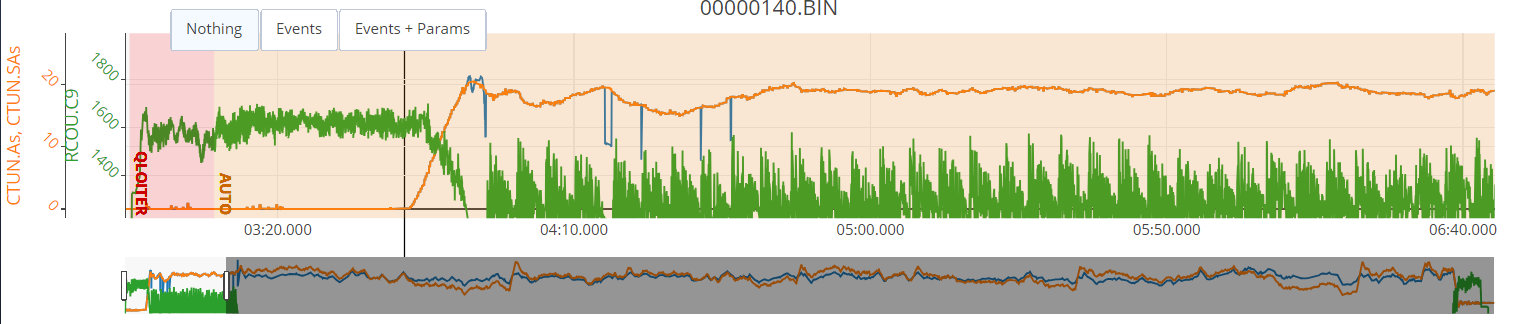
The quad motor gets activated whenever the CTUN.As value drops below Q_Assist value. Which is not desirable and decreases the overall flight time of the craft.